 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoRe-Gen: Robust Spectrum-to-Structure Generation under Imperfect Fingerprint Conditions
May 13, 2026Molecular structure elucidation from tandem mass spectra (MS/MS) remains challenging, particularly for de novo generation beyond database coverage. A common approach decomposes the task into spectrum-to-fingerprint prediction followed by fingerprint-to-structure decoding, enabling the use of large-scale molecular corpora. However, at deployment, the decoder relies on predicted rather than oracle fingerprints, introducing structured errors that propagate into generation. This results in a fundamental condition mismatch, where models trained on clean inputs must operate under noisy, biased predictions, especially for long-tail substructures. We present CoRe-Gen that explicitly addresses this gap. CoRe-Gen improves the intermediate condition via synthetic-spectrum pretraining of the encoder, matches deployment-time noise through frequency-aware fingerprint corruption during decoder training, and mitigates residual errors using structure-aware autoregressive decoding with compositional SELFIES representations, auxiliary structural supervision, and lightweight chemical constraints. Experiments on standard benchmarks show that CoRe-Gen establishes a new state of the art on NPLIB1, achieving 19.54\% Top-1 and 29.92\% Top-10 exact-match accuracy, while remaining competitive on the more challenging MassSpecGym benchmark. Importantly, CoRe-Gen preserves the efficiency advantages of autoregressive decoding, providing a practical and scalable solution for robust spectrum-to-structure generation under realistic conditions.
A survey of machine learning-based physics event generation
Jun 01, 2021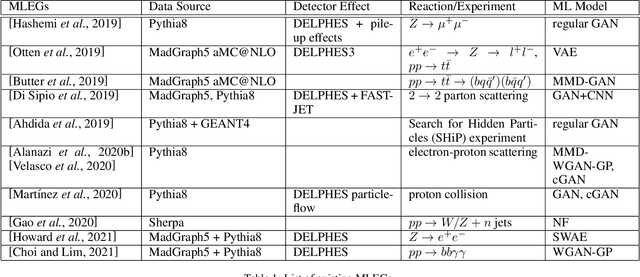
Event generators in high-energy nuclear and particle physics play an important role in facilitating studies of particle reactions. We survey the state-of-the-art of machine learning (ML) efforts at building physics event generators. We review ML generative models used in ML-based event generators and their specific challenges, and discuss various approaches of incorporating physics into the ML model designs to overcome these challenges. Finally, we explore some open questions related to super-resolution, fidelity, and extrapolation for physics event generation based on ML technology.
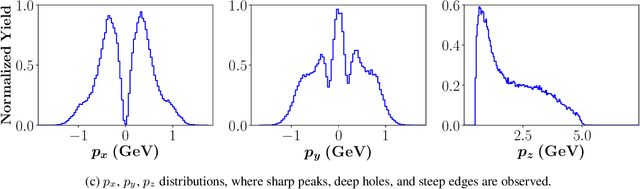
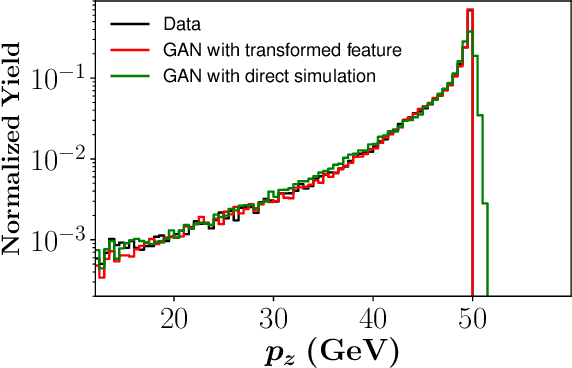
Simulation of electron-proton scattering events by a Feature-Augmented and Transformed Generative Adversarial Network (FAT-GAN)
Jan 29, 2020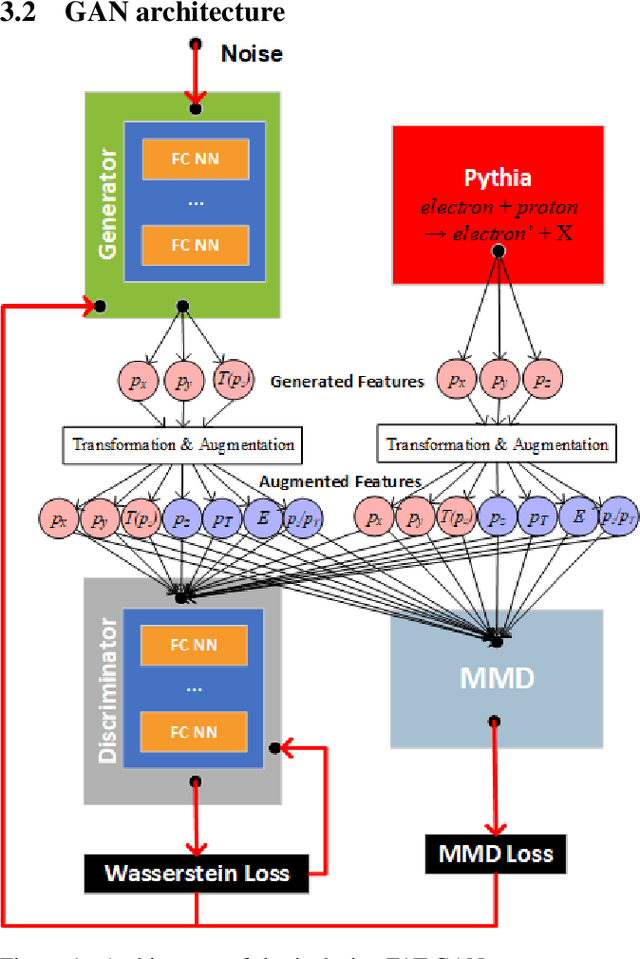
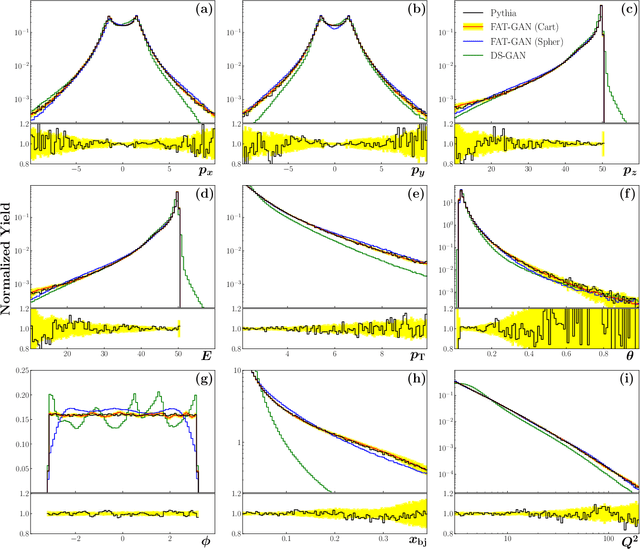
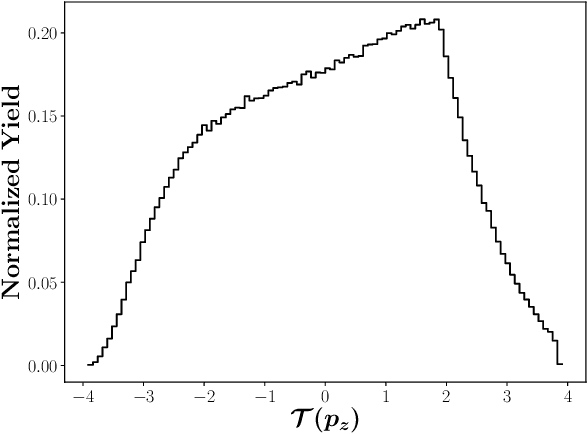
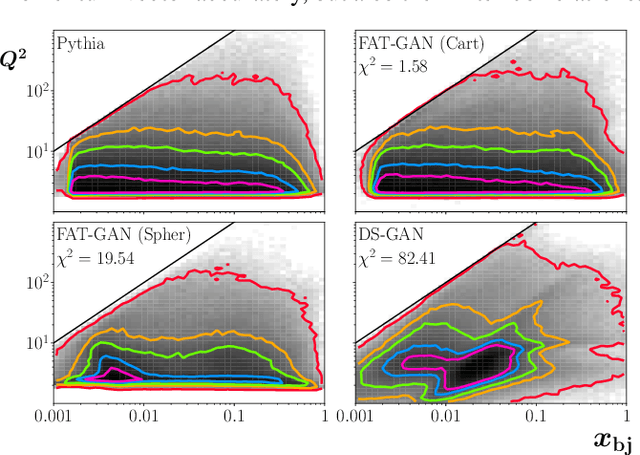
We apply generative adversarial network (GAN) technology to build an event generator that simulates particle production in electron-proton scattering that is free of theoretical assumptions about underlying particle dynamics. The difficulty of efficiently training a GAN event simulator lies in learning the complicated patterns of the distributions of the particles physical properties. We develop a GAN that selects a set of transformed features from particle momenta that can be generated easily by the generator, and uses these to produce a set of augmented features that improve the sensitivity of the discriminator. The new Feature-Augmented and Transformed GAN (FAT-GAN) is able to faithfully reproduce the distribution of final state electron momenta in inclusive electron scattering, without the need for input derived from domain-based theoretical assumptions. The developed technology can play a significant role in boosting the science of the Jefferson Lab 12 GeV program and the future Electron-Ion Collider.
Learning Unmanned Aerial Vehicle Control for Autonomous Target Following
Sep 24, 2017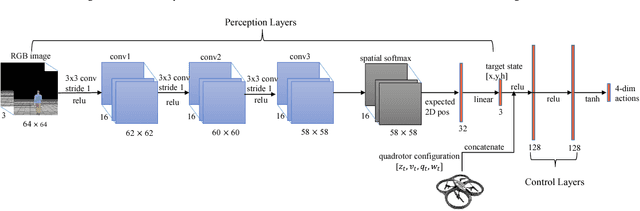
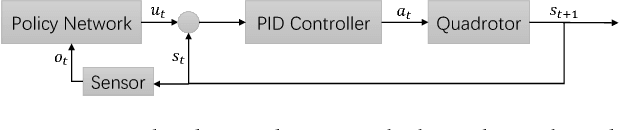
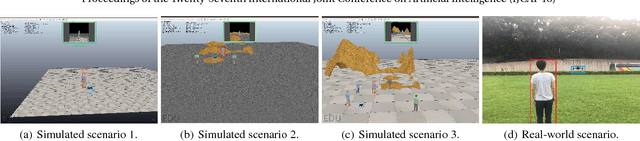
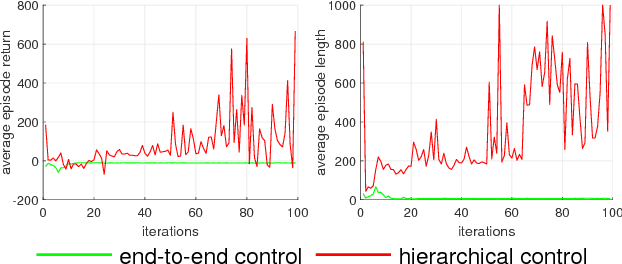
While deep reinforcement learning (RL) methods have achieved unprecedented successes in a range of challenging problems, their applicability has been mainly limited to simulation or game domains due to the high sample complexity of the trial-and-error learning process. However, real-world robotic applications often need a data-efficient learning process with safety-critical constraints. In this paper, we consider the challenging problem of learning unmanned aerial vehicle (UAV) control for tracking a moving target. To acquire a strategy that combines perception and control, we represent the policy by a convolutional neural network. We develop a hierarchical approach that combines a model-free policy gradient method with a conventional feedback proportional-integral-derivative (PID) controller to enable stable learning without catastrophic failure. The neural network is trained by a combination of supervised learning from raw images and reinforcement learning from games of self-play. We show that the proposed approach can learn a target following policy in a simulator efficiently and the learned behavior can be successfully transferred to the DJI quadrotor platform for real-world UAV control.