 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Proprioceptive Slip-Velocity-Aware State Estimation for Mobile Robots via Invariant Kalman Filtering and Disturbance Observer
Sep 29, 2022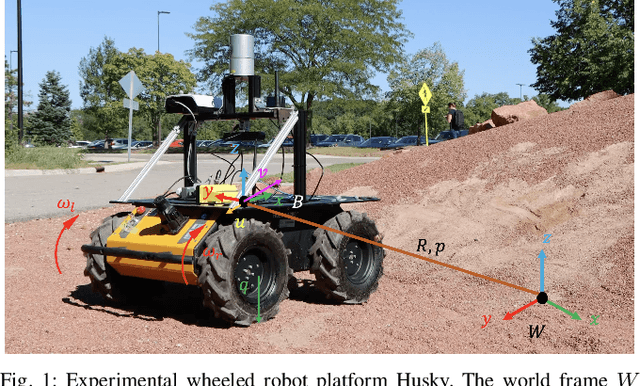
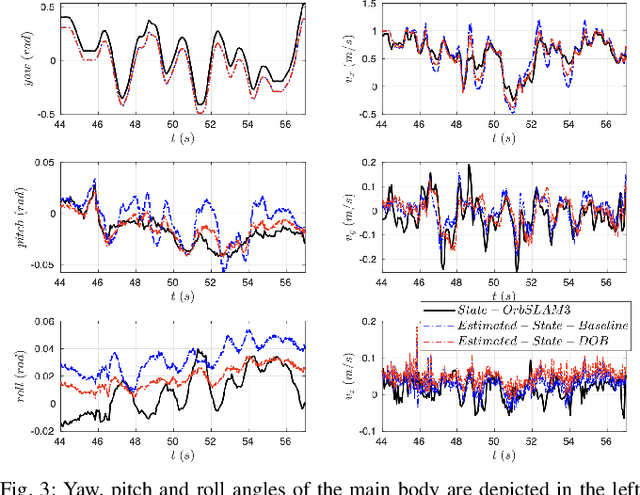
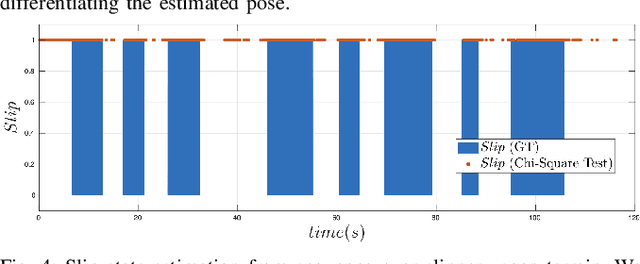

This paper develops a novel slip estimator using the invariant observer design theory and Disturbance Observer (DOB). The proposed state estimator for mobile robots is fully proprioceptive and combines data from an inertial measurement unit and body velocity within a Right Invariant Extended Kalman Filter (RI-EKF). By embedding the slip velocity into $\mathrm{SE}_3(3)$ Lie group, the developed DOB-based RI-EKF provides real-time accurate velocity and slip velocity estimates on different terrains. Experimental results using a Husky wheeled robot confirm the mathematical derivations and show better performance than a standard RI-EKF baseline. Open source software is available for download and reproducing the presented results.
SoLo T-DIRL: Socially-Aware Dynamic Local Planner based on Trajectory-Ranked Deep Inverse Reinforcement Learning
Sep 16, 2022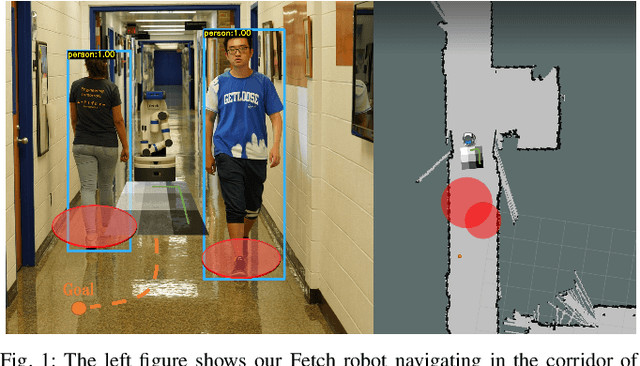
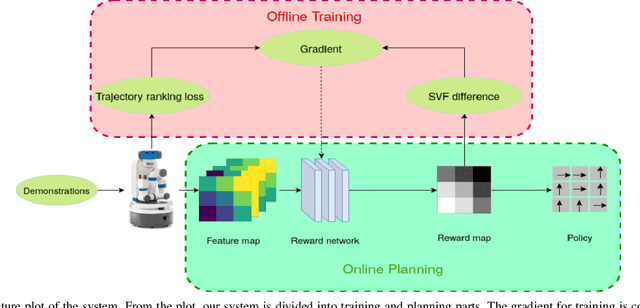
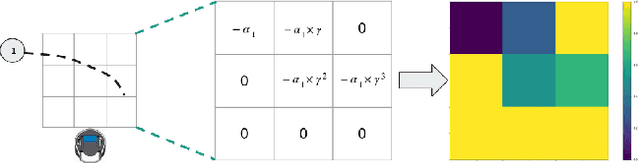
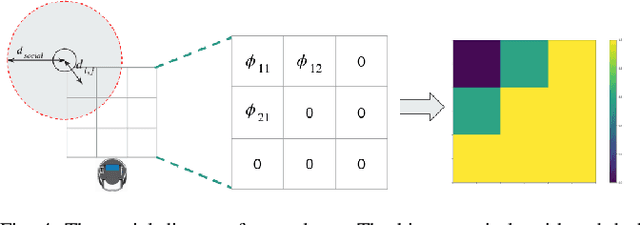
This work proposes a new framework for a socially-aware dynamic local planner in crowded environments by building on the recently proposed Trajectory-ranked Maximum Entropy Deep Inverse Reinforcement Learning (T-MEDIRL). To address the social navigation problem, our multi-modal learning planner explicitly considers social interaction factors, as well as social-awareness factors into T-MEDIRL pipeline to learn a reward function from human demonstrations. Moreover, we propose a novel trajectory ranking score using the sudden velocity change of pedestrians around the robot to address the sub-optimality in human demonstrations. Our evaluation shows that this method can successfully make a robot navigate in a crowded social environment and outperforms the state-of-art social navigation methods in terms of the success rate, navigation time, and invasion rate.
Providers-Clients-Robots: Framework for spatial-semantic planning for shared understanding in human-robot interaction
Jun 21, 2022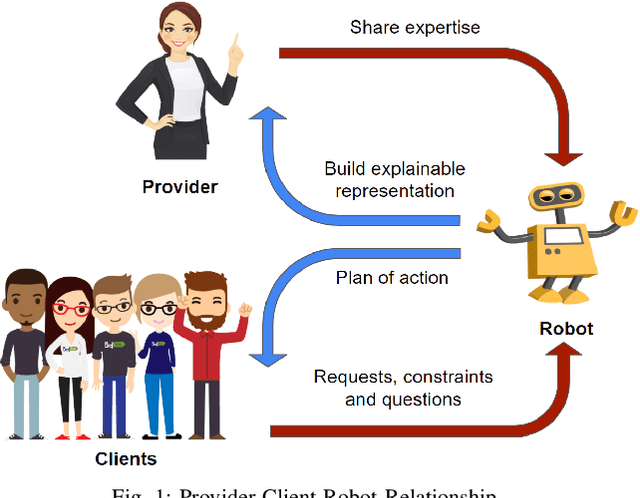
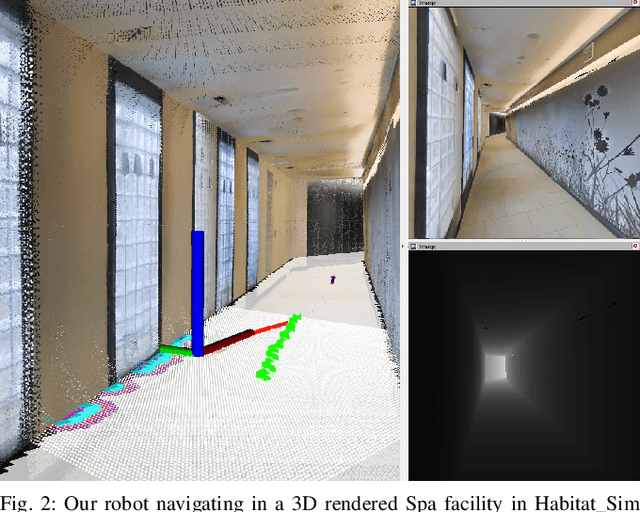
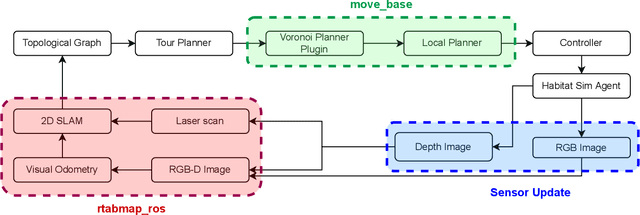
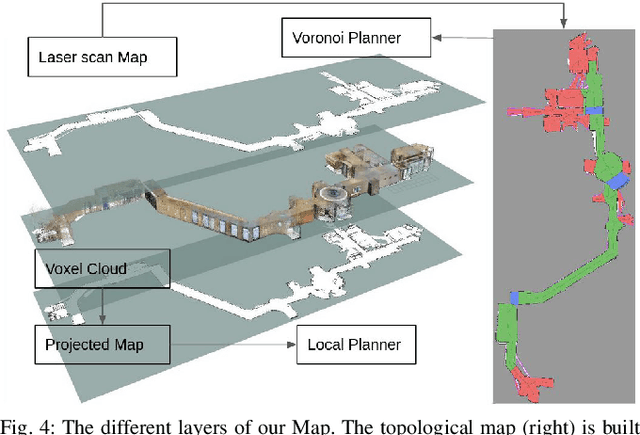
This paper develops a novel framework called Providers-Clients-Robots (PCR), applicable to socially assistive robots that support research on shared understanding in human-robot interactions. Providers, Clients, and Robots share an actionable and intuitive representation of the environment to create plans that best satisfy the combined needs of all parties. The plans are formed via interaction between the Client and the Robot based on a previously built multi-modal navigation graph. The explainable environmental representation in the form of a navigation graph is constructed collaboratively between Providers and Robots prior to interaction with Clients. We develop a realization of the proposed framework to create a spatial-semantic representation of an indoor environment autonomously. Moreover, we develop a planner that takes in constraints from Providers and Clients of the establishment and dynamically plans a sequence of visits to each area of interest. Evaluations show that the proposed realization of the PCR framework can successfully make plans while satisfying the specified time budget and sequence constraints and outperforming the greedy baseline.