 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfrastructure-based Autonomous Mobile Robots for Internal Logistics -- Challenges and Future Perspectives
Dec 17, 2025



The adoption of Autonomous Mobile Robots (AMRs) for internal logistics is accelerating, with most solutions emphasizing decentralized, onboard intelligence. While AMRs in indoor environments like factories can be supported by infrastructure, involving external sensors and computational resources, such systems remain underexplored in the literature. This paper presents a comprehensive overview of infrastructure-based AMR systems, outlining key opportunities and challenges. To support this, we introduce a reference architecture combining infrastructure-based sensing, on-premise cloud computing, and onboard autonomy. Based on the architecture, we review core technologies for localization, perception, and planning. We demonstrate the approach in a real-world deployment in a heavy-vehicle manufacturing environment and summarize findings from a user experience (UX) evaluation. Our aim is to provide a holistic foundation for future development of scalable, robust, and human-compatible AMR systems in complex industrial environments.
Ergo, SMIRK is Safe: A Safety Case for a Machine Learning Component in a Pedestrian Automatic Emergency Brake System
Apr 16, 2022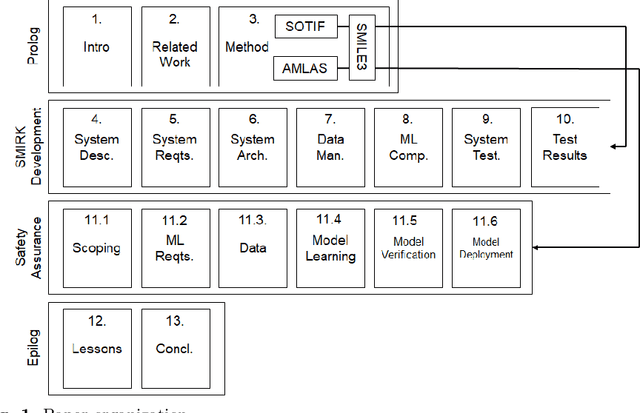
Integration of Machine Learning (ML) components in critical applications introduces novel challenges for software certification and verification. New safety standards and technical guidelines are under development to support the safety of ML-based systems, e.g., ISO 21448 SOTIF for the automotive domain and the Assurance of Machine Learning for use in Autonomous Systems (AMLAS) framework. SOTIF and AMLAS provide high-level guidance but the details must be chiseled out for each specific case. We report results from an industry-academia collaboration on safety assurance of SMIRK, an ML-based pedestrian automatic emergency braking demonstrator running in an industry-grade simulator. We present the outcome of applying AMLAS on SMIRK for a minimalistic operational design domain, i.e., a complete safety case for its integrated ML-based component. Finally, we report lessons learned and provide both SMIRK and the safety case under an open-source licence for the research community to reuse.