 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Aware Robust Model Predictive Control for Robotic Arms in Dynamic Environments
May 30, 2025Robotic manipulators are essential for precise industrial pick-and-place operations, yet planning collision-free trajectories in dynamic environments remains challenging due to uncertainties such as sensor noise and time-varying delays. Conventional control methods often fail under these conditions, motivating the development of Robust MPC (RMPC) strategies with constraint tightening. In this paper, we propose a novel RMPC framework that integrates phase-based nominal control with a robust safety mode, allowing smooth transitions between safe and nominal operations. Our approach dynamically adjusts constraints based on real-time predictions of moving obstacles\textemdash whether human, robot, or other dynamic objects\textemdash thus ensuring continuous, collision-free operation. Simulation studies demonstrate that our controller improves both motion naturalness and safety, achieving faster task completion than conventional methods.
Low-Power Computer Vision: Status, Challenges, Opportunities
Apr 15, 2019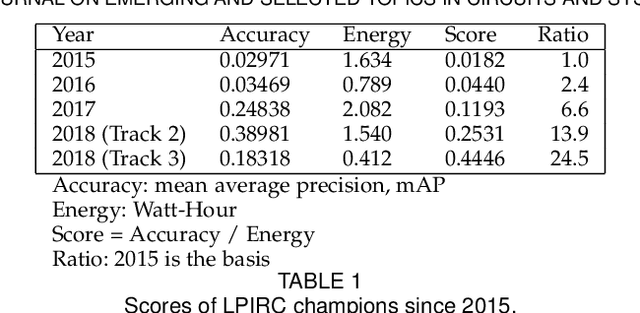
Computer vision has achieved impressive progress in recent years. Meanwhile, mobile phones have become the primary computing platforms for millions of people. In addition to mobile phones, many autonomous systems rely on visual data for making decisions and some of these systems have limited energy (such as unmanned aerial vehicles also called drones and mobile robots). These systems rely on batteries and energy efficiency is critical. This article serves two main purposes: (1) Examine the state-of-the-art for low-power solutions to detect objects in images. Since 2015, the IEEE Annual International Low-Power Image Recognition Challenge (LPIRC) has been held to identify the most energy-efficient computer vision solutions. This article summarizes 2018 winners' solutions. (2) Suggest directions for research as well as opportunities for low-power computer vision.
2018 Low-Power Image Recognition Challenge
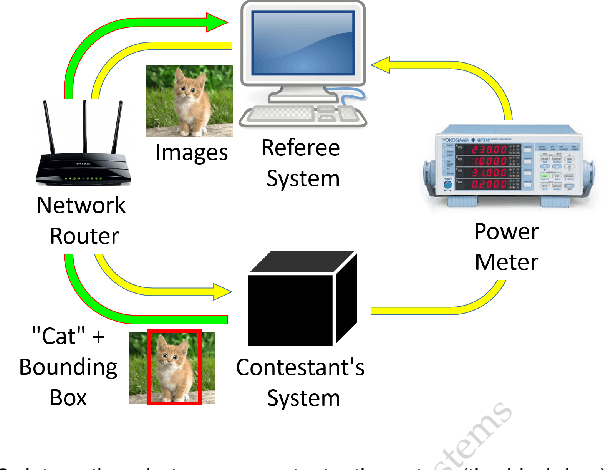
Oct 03, 2018The Low-Power Image Recognition Challenge (LPIRC, https://rebootingcomputing.ieee.org/lpirc) is an annual competition started in 2015. The competition identifies the best technologies that can classify and detect objects in images efficiently (short execution time and low energy consumption) and accurately (high precision). Over the four years, the winners' scores have improved more than 24 times. As computer vision is widely used in many battery-powered systems (such as drones and mobile phones), the need for low-power computer vision will become increasingly important. This paper summarizes LPIRC 2018 by describing the three different tracks and the winners' solutions.