 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Ellipsoids to Midair Control of Dynamic Hitches
Feb 08, 2026The ability to dynamically manipulate interaction between cables, carried by pairs of aerial vehicles attached to the ends of each cable, can greatly improve the versatility and agility of cable-assisted aerial manipulation. Such interlacing cables create hitches by winding two or more cables around each other, which can enclose payloads or can further develop into knots. Dynamic modeling and control of such hitches is key to mastering the inter-cable manipulation in context of cable-suspended aerial manipulation. This paper introduces an ellipsoid-based kinematic model to connect the geometric nature of a hitch created by two cables and the dynamics of the hitch driven by four aerial vehicles, which reveals the control-affine form of the system. As the constraint for maintaining tension of a cable is also control-affine, we design a quadratic programming-based controller that combines Control Lyapunov and High-Order Control Barrier Functions (CLF-HOCBF-QP) to precisely track a desired hitch position and system shape while enforcing safety constraints like cable tautness. We convert desired geometric reference configurations into target robot positions and introduce a composite error into the Lyapunov function to ensure a relative degree of one to the input. Numerical simulations validate our approach, demonstrating stable, high-speed tracking of dynamic references.
Weighted Combinatorial Laplacian and its Application to Coverage Repair in Sensor Networks
Dec 08, 2023



We define the weighted combinatorial Laplacian operators on a simplicial complex and investigate their spectral properties. Eigenvalues close to zero and the corresponding eigenvectors of them are especially of our interest, and we show that they can detect almost $n$-dimensional holes in the given complex. Real-valued weights on simplices allow gradient descent based optimization, which in turn gives an efficient dynamic coverage repair algorithm for the sensor network of a mobile robot team.
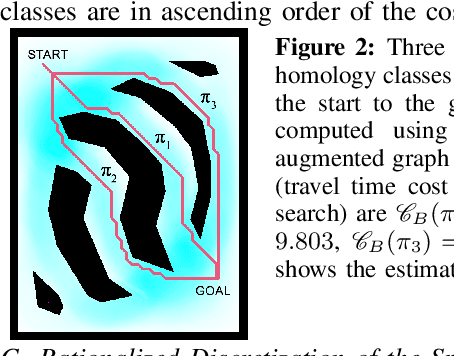
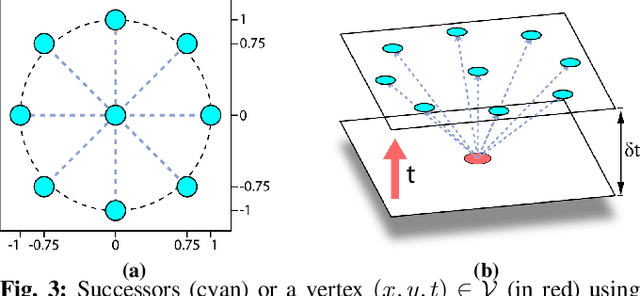
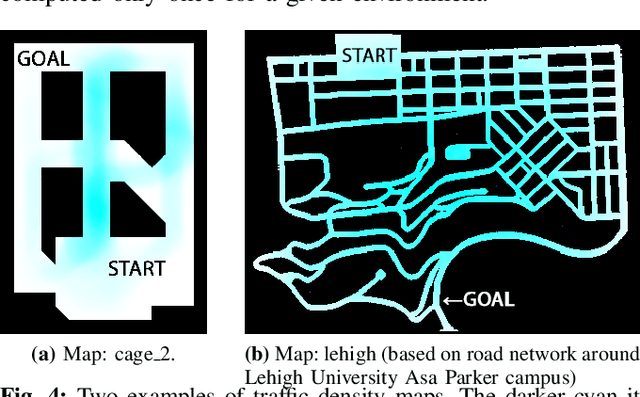
Optimal Path Planning in Distinct Topo-Geometric Classes using Neighborhood-augmented Graph and its Application to Path Planning for a Tethered Robot in 3D
Jun 01, 2023


Many robotics applications benefit from being able to compute multiple locally optimal paths in a given configuration space. Examples include path planning for of tethered robots with cable-length constraints, systems involving cables, multi-robot topological exploration & coverage, and, congestion reduction for mobile robots navigation without inter-robot coordination. Existing paradigm is to use topological path planning methods that can provide optimal paths from distinct topological classes available in the underlying configuration space. However, these methods usually require non-trivial and non-universal geometrical constructions, which are prohibitively complex or expensive in 3 or higher dimensional configuration spaces with complex topology. Furthermore, topological methods are unable to distinguish between locally optimal paths that belong to the same topological class but are distinct because of genus-zero obstacles in 3D or due to high-cost or high-curvature regions. In this paper we propose an universal and generalized approach to multi-class path planning using the concept of a novel neighborhood-augmented graph, search-based planning in which can compute paths in distinct topo-geometric classes. This approach can find desired number of locally optimal paths in a wider variety of configuration spaces without requiring any complex pre-processing or geometric constructions. Unlike the existing topological methods, resulting optimal paths are not restricted to distinct topological classes, thus making the algorithm applicable to many other problems where locally optimal and geometrically distinct paths are of interest. For the demonstration of an application of the proposed approach, we implement our algorithm to planning for shortest traversible paths for a tethered robot with cable-length constraint navigating in 3D and validate it in simulations & experiments.
Forming and Controlling Hitches in Midair Using Aerial Robots
Mar 13, 2023



The use of cables for aerial manipulation has shown to be a lightweight and versatile way to interact with objects. However, fastening objects using cables is still a challenge and human is required. In this work, we propose a novel way to secure objects using hitches. The hitch can be formed and morphed in midair using a team of aerial robots with cables. The hitch's shape is modeled as a convex polygon, making it versatile and adaptable to a wide variety of objects. We propose an algorithm to form the hitch systematically. The steps can run in parallel, allowing hitches with a large number of robots to be formed in constant time. We develop a set of actions that include different actions to change the shape of the hitch. We demonstrate our methods using a team of aerial robots via simulation and actual experiments.
Multi-Agent Exploration of an Unknown Sparse Landmark Complex via Deep Reinforcement Learning
Sep 23, 2022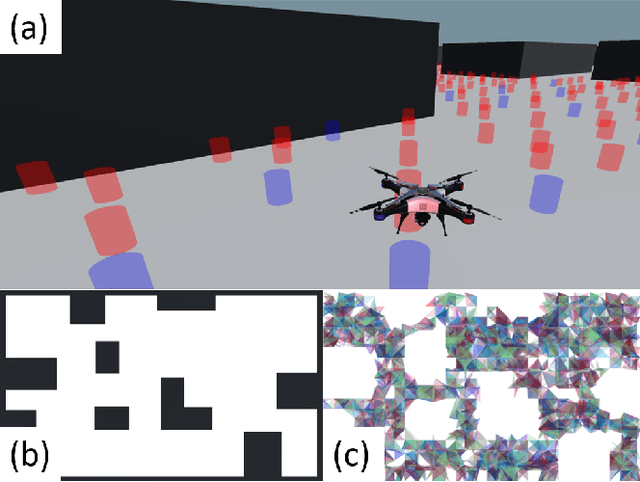
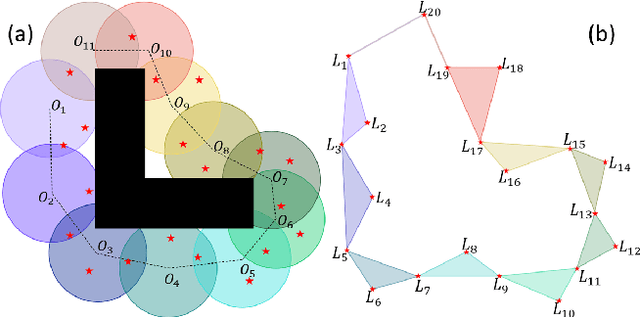
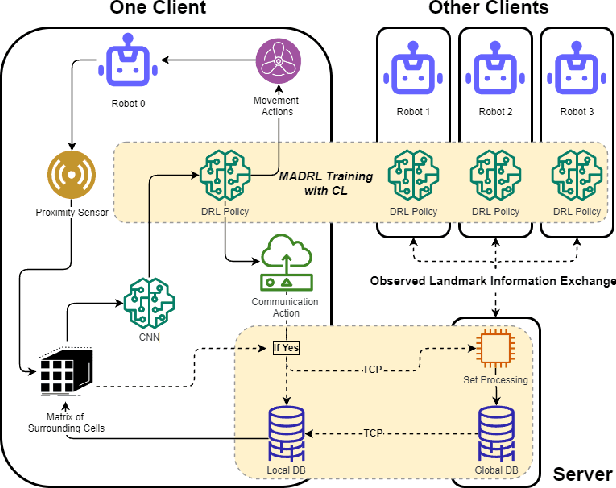
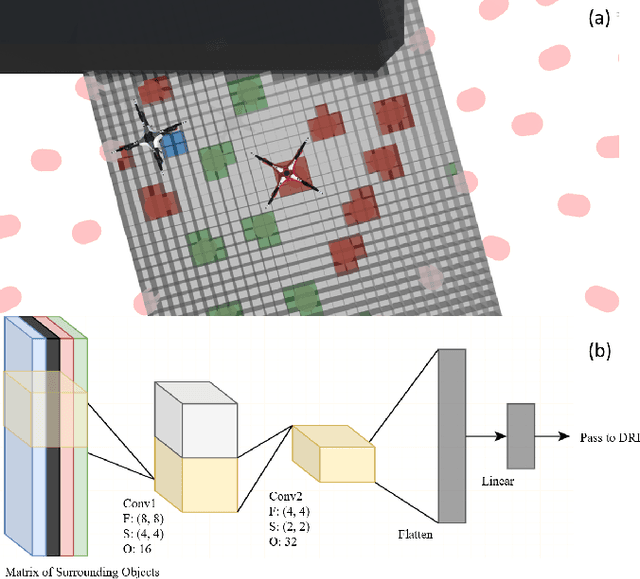
In recent years Landmark Complexes have been successfully employed for localization-free and metric-free autonomous exploration using a group of sensing-limited and communication-limited robots in a GPS-denied environment. To ensure rapid and complete exploration, existing works make assumptions on the density and distribution of landmarks in the environment. These assumptions may be overly restrictive, especially in hazardous environments where landmarks may be destroyed or completely missing. In this paper, we first propose a deep reinforcement learning framework for multi-agent cooperative exploration in environments with sparse landmarks while reducing client-server communication. By leveraging recent development on partial observability and credit assignment, our framework can train the exploration policy efficiently for multi-robot systems. The policy receives individual rewards from actions based on a proximity sensor with limited range and resolution, which is combined with group rewards to encourage collaborative exploration and construction of the Landmark Complex through observation of 0-, 1- and 2-dimensional simplices. In addition, we employ a three-stage curriculum learning strategy to mitigate the reward sparsity by gradually adding random obstacles and destroying random landmarks. Experiments in simulation demonstrate that our method outperforms the state-of-the-art landmark complex exploration method in efficiency among different environments with sparse landmarks.
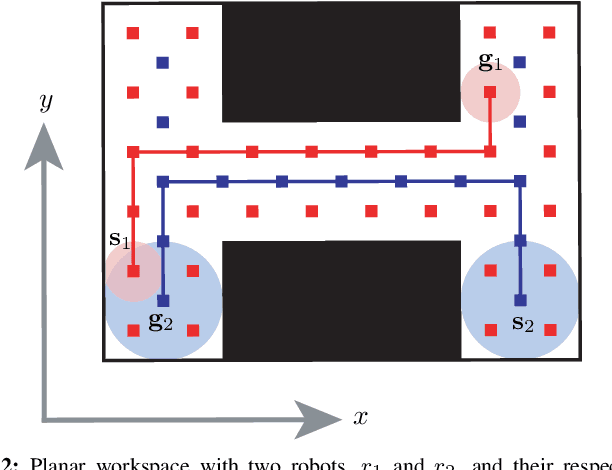
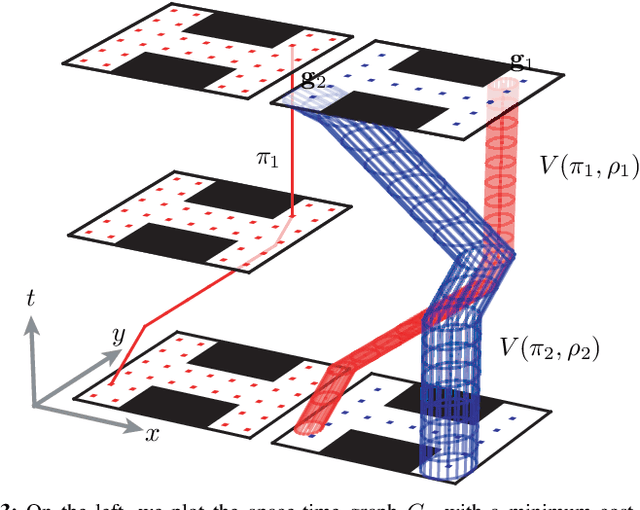
Coordination-free Multi-robot Path Planning for Congestion Reduction Using Topological Reasoning
May 02, 2022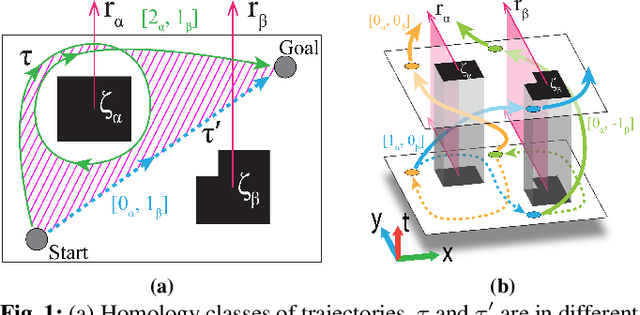
We consider the problem of multi-robot path planning in a complex, cluttered environment with the aim of reducing overall congestion in the environment, while avoiding any inter-robot communication or coordination. Such limitations may exist due to lack of communication or due to privacy restrictions (for example, autonomous vehicles may not want to share their locations or intents with other vehicles or even to a central server). The key insight that allows us to solve this problem is to stochastically distribute the robots across different routes in the environment by assigning them paths in different topologically distinct classes, so as to lower congestion and the overall travel time for all robots in the environment. We outline the computation of topologically distinct paths in a spatio-temporal configuration space and propose methods for the stochastic assignment of paths to the robots. A fast replanning algorithm and a potential field based controller allow robots to avoid collision with nearby agents while following the assigned path. Our simulation and experiment results show a significant advantage over shortest path following under such a coordination-free setup.
Training Robust Graph Neural Networks with Topology Adaptive Edge Dropping
Jun 05, 2021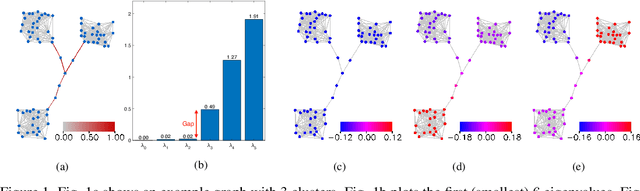
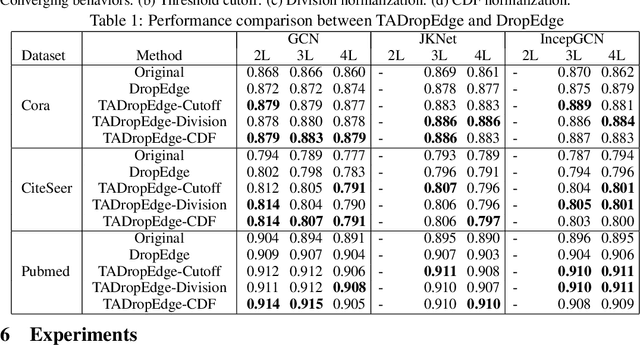
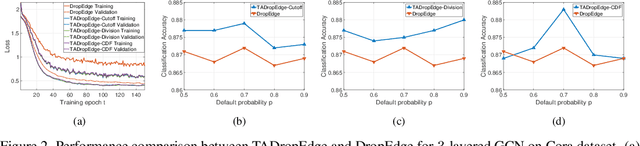
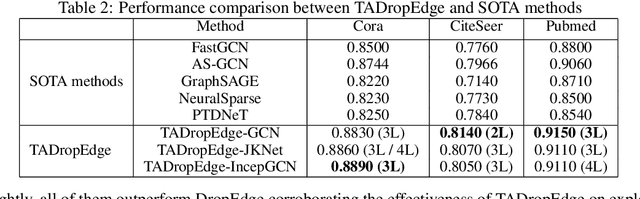
Graph neural networks (GNNs) are processing architectures that exploit graph structural information to model representations from network data. Despite their success, GNNs suffer from sub-optimal generalization performance given limited training data, referred to as over-fitting. This paper proposes Topology Adaptive Edge Dropping (TADropEdge) method as an adaptive data augmentation technique to improve generalization performance and learn robust GNN models. We start by explicitly analyzing how random edge dropping increases the data diversity during training, while indicating i.i.d. edge dropping does not account for graph structural information and could result in noisy augmented data degrading performance. To overcome this issue, we consider graph connectivity as the key property that captures graph topology. TADropEdge incorporates this factor into random edge dropping such that the edge-dropped subgraphs maintain similar topology as the underlying graph, yielding more satisfactory data augmentation. In particular, TADropEdge first leverages the graph spectrum to assign proper weights to graph edges, which represent their criticality for establishing the graph connectivity. It then normalizes the edge weights and drops graph edges adaptively based on their normalized weights. Besides improving generalization performance, TADropEdge reduces variance for efficient training and can be applied as a generic method modular to different GNN models. Intensive experiments on real-life and synthetic datasets corroborate theory and verify the effectiveness of the proposed method.
Pursuer Assignment and Control Strategies in Multi-agent Pursuit-Evasion Under Uncertainties
Mar 29, 2021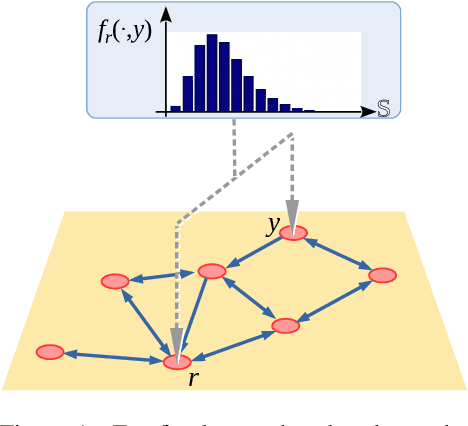
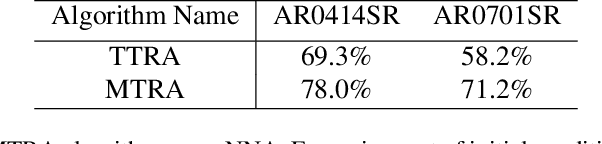
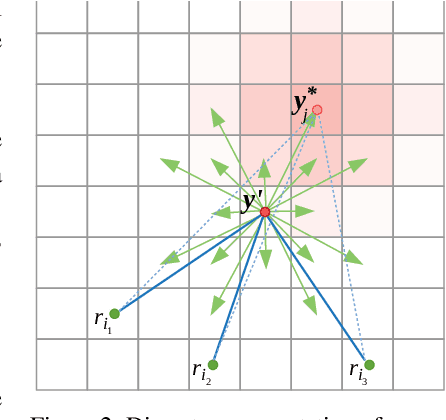
We consider a pursuit-evasion problem with a heterogeneous team of multiple pursuers and multiple evaders. Although both the pursuers (robots) and the evaders are aware of each others' control and assignment strategies, they do not have exact information about the other type of agents' location or action. Using only noisy on-board sensors the pursuers (or evaders) make probabilistic estimation of positions of the evaders (or pursuers). Each type of agent use Markov localization to update the probability distribution of the other type. A search-based control strategy is developed for the pursuers that intrinsically takes the probability distribution of the evaders into account. Pursuers are assigned using an assignment algorithm that takes redundancy (i.e., an excess in the number of pursuers than the number of evaders) into account, such that the total or maximum estimated time to capture the evaders is minimized. In this respect we assume the pursuers to have clear advantage over the evaders. However, the objective of this work is to use assignment strategies that minimize the capture time. This assignment strategy is based on a modified Hungarian algorithm as well as a novel algorithm for determining assignment of redundant pursuers. The evaders, in order to effectively avoid the pursuers, predict the assignment based on their probabilistic knowledge of the pursuers and use a control strategy to actively move away from those pursues. Our experimental evaluation shows that the redundant assignment algorithm performs better than an alternative nearest-neighbor based assignment algorithm.
Landmark-based Distributed Topological Mapping and Navigation in GPS-denied Urban Environments Using Teams of Low-cost Robots
Mar 05, 2021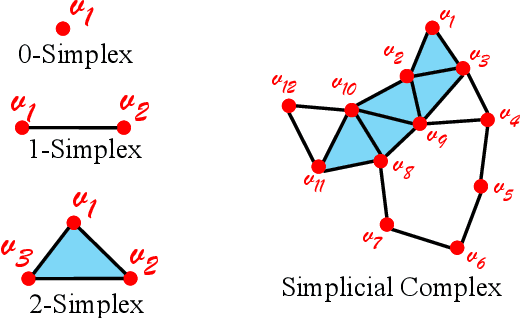
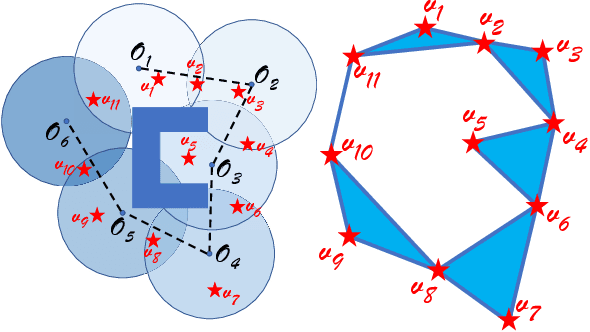
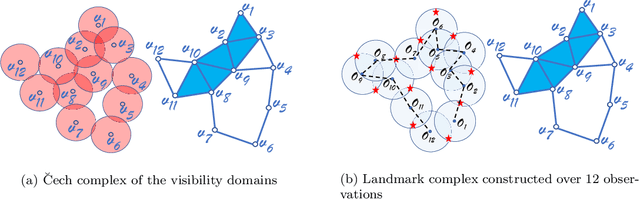
In this paper, we address the problem of autonomous multi-robot mapping, exploration and navigation in unknown, GPS-denied indoor or urban environments using a swarm of robots equipped with directional sensors with limited sensing capabilities and limited computational resources. The robots have no a priori knowledge of the environment and need to rapidly explore and construct a map in a distributed manner using existing landmarks, the presence of which can be detected using onboard senors, although little to no metric information (distance or bearing to the landmarks) is available. In order to correctly and effectively achieve this, the presence of a necessary density/distribution of landmarks is ensured by design of the urban/indoor environment. We thus address this problem in two phases: 1) During the design/construction of the urban/indoor environment we can ensure that sufficient landmarks are placed within the environment. To that end we develop a filtration-based approach for designing strategic placement of landmarks in an environment. 2) We develop a distributed algorithm using which a team of robots, with no a priori knowledge of the environment, can explore such an environment, construct a topological map requiring no metric/distance information, and use that map to navigate within the environment. This is achieved using a topological representation of the environment (called a Landmark Complex), instead of constructing a complete metric/pixel map. The representation is built by the robot as well as used by them for navigation through a balance between exploration and exploitation. We use tools from homology theory for identifying "holes" in the coverage/exploration of the unknown environment and hence guiding the robots towards achieving a complete exploration and mapping of the environment.
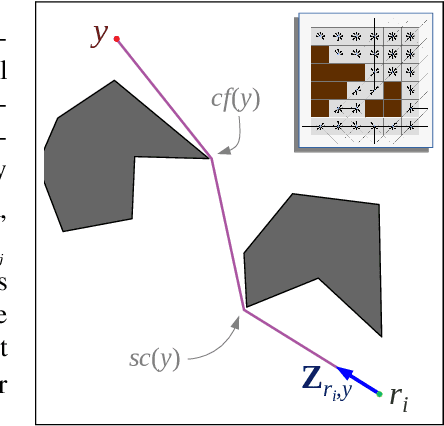
Multi-Robot Path Deconfliction through Prioritization by Path Prospects
Aug 06, 2019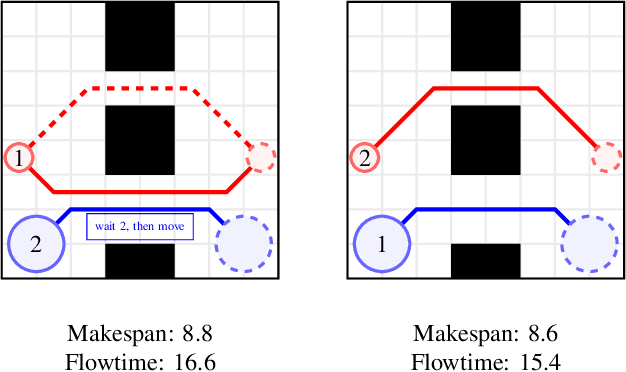
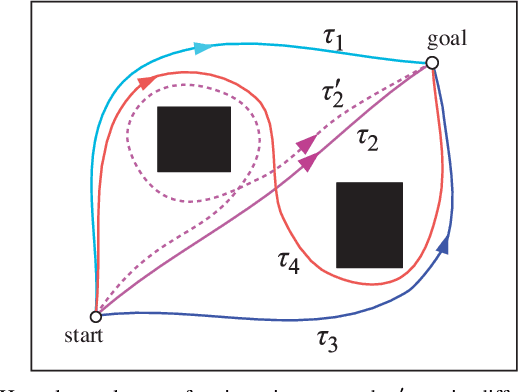
This work deals with the problem of planning conflict-free paths for mobile robots in cluttered environments. Since centralized, coupled planning algorithms are computationally intractable for large numbers of robots, we consider decoupled planning, in which robots plan their paths sequentially in order of priority. Choosing how to prioritize the robots is a key consideration. State-of-the-art prioritization heuristics, however, do not model the coupling between a robot's mobility and its environment. In this paper, we propose a prioritization rule that can be computed online by each robot independently, and that provides consistent, conflict-free path plans. Our innovation is to formalize a robot's path prospects to reach its goal from its current location. To this end, we consider the number of homology classes of trajectories, and use this as a prioritization rule in our decentralized path planning algorithm, whenever any robots enter negotiation to deconflict path plans. This prioritization rule guarantees a partial ordering over the robot set. We perform simulations that compare our method to five benchmarks, and show that it reaches the highest success rate (w.r.t. completeness), and that it strikes the best balance between makespan and flowtime objectives.