 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Prediction with Linguistic Representations
Oct 19, 2021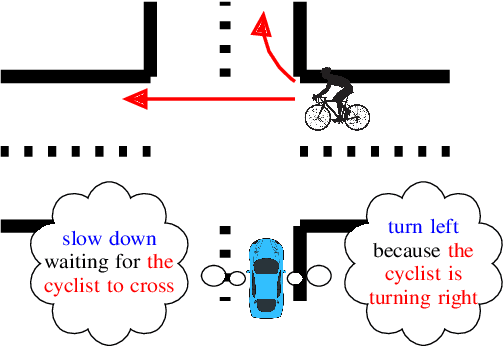
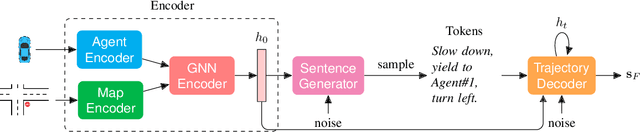
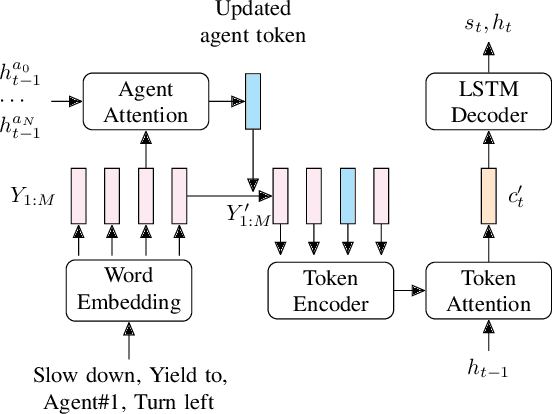
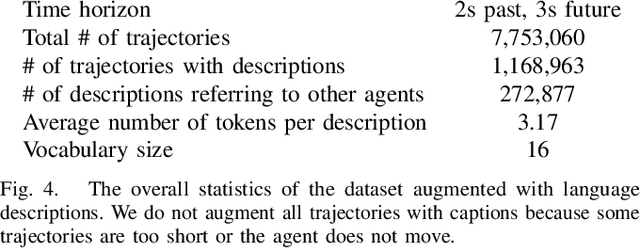
Language allows humans to build mental models that interpret what is happening around them resulting in more accurate long-term predictions. We present a novel trajectory prediction model that uses linguistic intermediate representations to forecast trajectories, and is trained using trajectory samples with partially annotated captions. The model learns the meaning of each of the words without direct per-word supervision. At inference time, it generates a linguistic description of trajectories which captures maneuvers and interactions over an extended time interval. This generated description is used to refine predictions of the trajectories of multiple agents. We train and validate our model on the Argoverse dataset, and demonstrate improved accuracy results in trajectory prediction. In addition, our model is more interpretable: it presents part of its reasoning in plain language as captions, which can aid model development and can aid in building confidence in the model before deploying it.
TIP: Task-Informed Motion Prediction for Intelligent Systems
Oct 17, 2021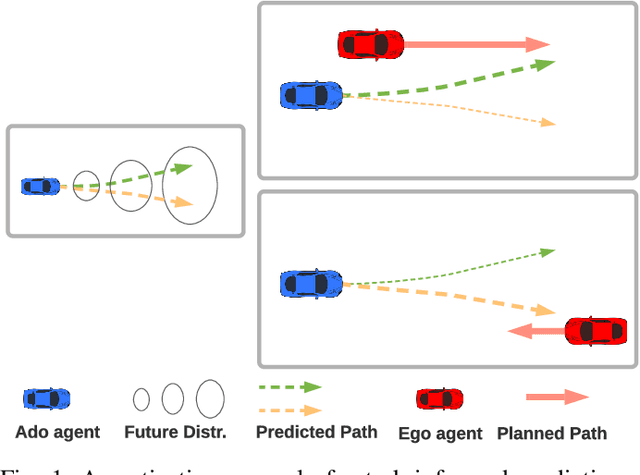
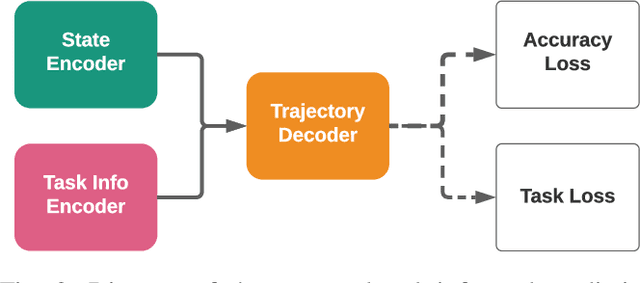
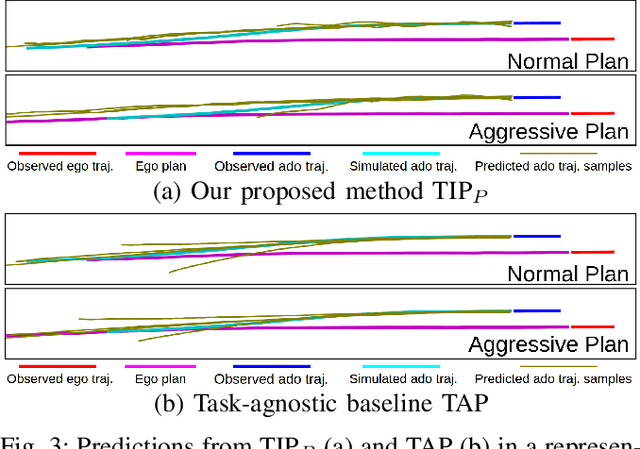
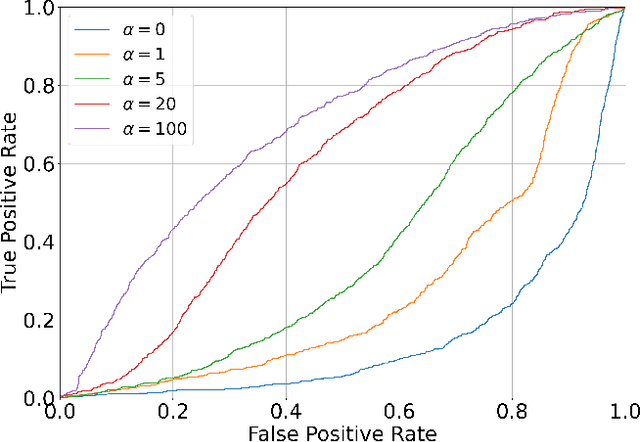
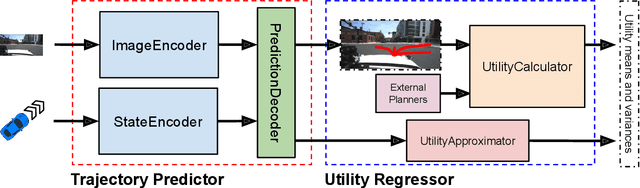
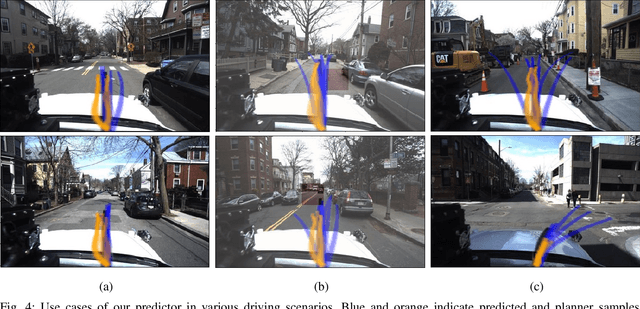
Motion prediction is important for intelligent driving systems, providing the future distributions of road agent behaviors and supporting various decision making tasks. Existing motion predictors are often optimized and evaluated via task-agnostic measures based on prediction accuracy. Such measures fail to account for the use of prediction in downstream tasks, and could result in sub-optimal task performance. We propose a task-informed motion prediction framework that jointly reasons about prediction accuracy and task utility, to better support downstream tasks through its predictions. The task utility function does not require the full task information, but rather a specification of the utility of the task, resulting in predictors that serve a wide range of downstream tasks. We demonstrate our framework on two use cases of task utilities, in the context of autonomous driving and parallel autonomy, and show the advantage of task-informed predictors over task-agnostic ones on the Waymo Open Motion dataset.
HYPER: Learned Hybrid Trajectory Prediction via Factored Inference and Adaptive Sampling
Oct 05, 2021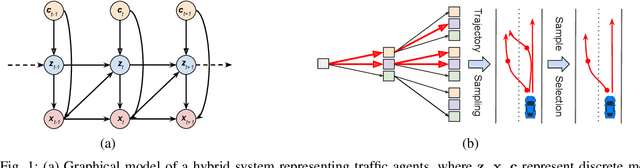
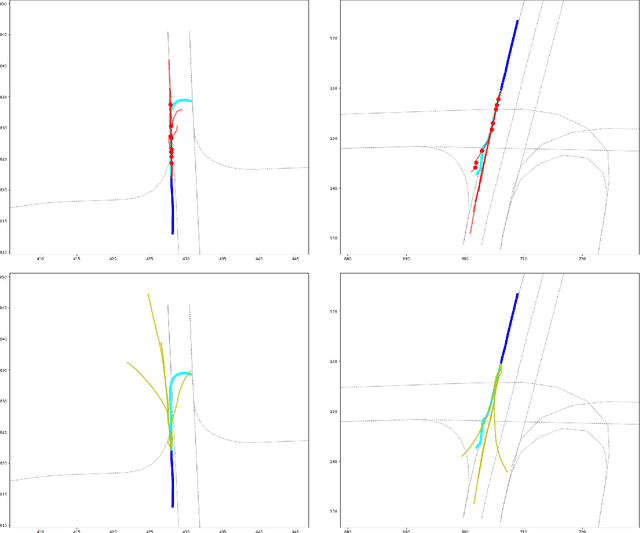
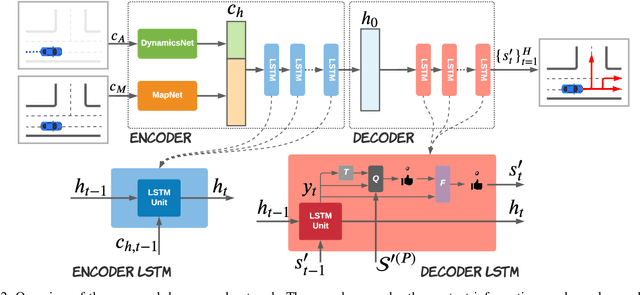
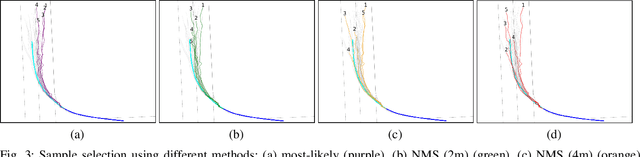
Modeling multi-modal high-level intent is important for ensuring diversity in trajectory prediction. Existing approaches explore the discrete nature of human intent before predicting continuous trajectories, to improve accuracy and support explainability. However, these approaches often assume the intent to remain fixed over the prediction horizon, which is problematic in practice, especially over longer horizons. To overcome this limitation, we introduce HYPER, a general and expressive hybrid prediction framework that models evolving human intent. By modeling traffic agents as a hybrid discrete-continuous system, our approach is capable of predicting discrete intent changes over time. We learn the probabilistic hybrid model via a maximum likelihood estimation problem and leverage neural proposal distributions to sample adaptively from the exponentially growing discrete space. The overall approach affords a better trade-off between accuracy and coverage. We train and validate our model on the Argoverse dataset, and demonstrate its effectiveness through comprehensive ablation studies and comparisons with state-of-the-art models.
CARPAL: Confidence-Aware Intent Recognition for Parallel Autonomy
Mar 18, 2020
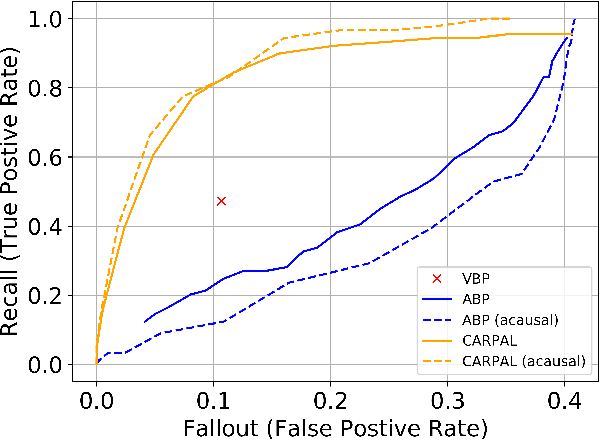
Predicting the behavior of road agents is a difficult and crucial task for both advanced driver assistance and autonomous driving systems. Traditional confidence measures for this important task often ignore the way predicted trajectories affect downstream decisions and their utilities. In this paper we devise a novel neural network regressor to estimate the utility distribution given the predictions. Based on reasonable assumptions on the utility function, we establish a decision criterion that takes into account the role of prediction in decision making. We train our real-time regressor along with a human driver intent predictor and use it in shared autonomy scenarios where decisions depend on the prediction confidence. We test our system on a realistic urban driving dataset, present the advantage of the resulting system in terms of recall and fall-out performance compared to baseline methods, and demonstrate its effectiveness in intervention and warning use cases.
Diversity-Aware Vehicle Motion Prediction via Latent Semantic Sampling
Nov 28, 2019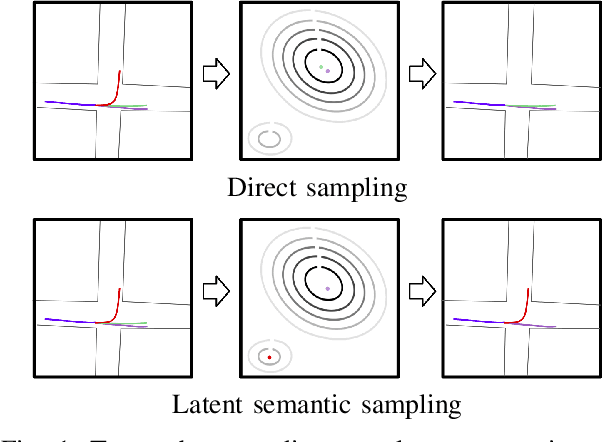
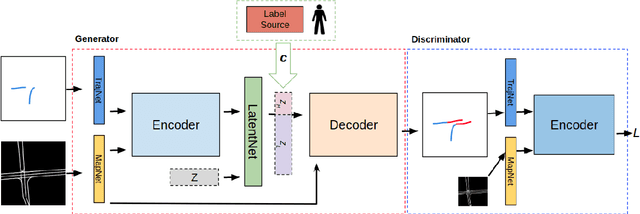
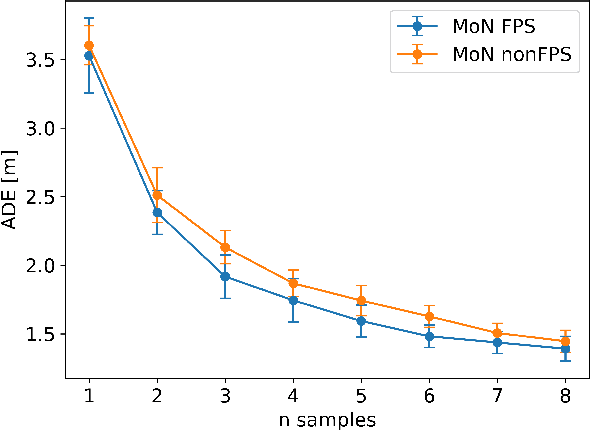
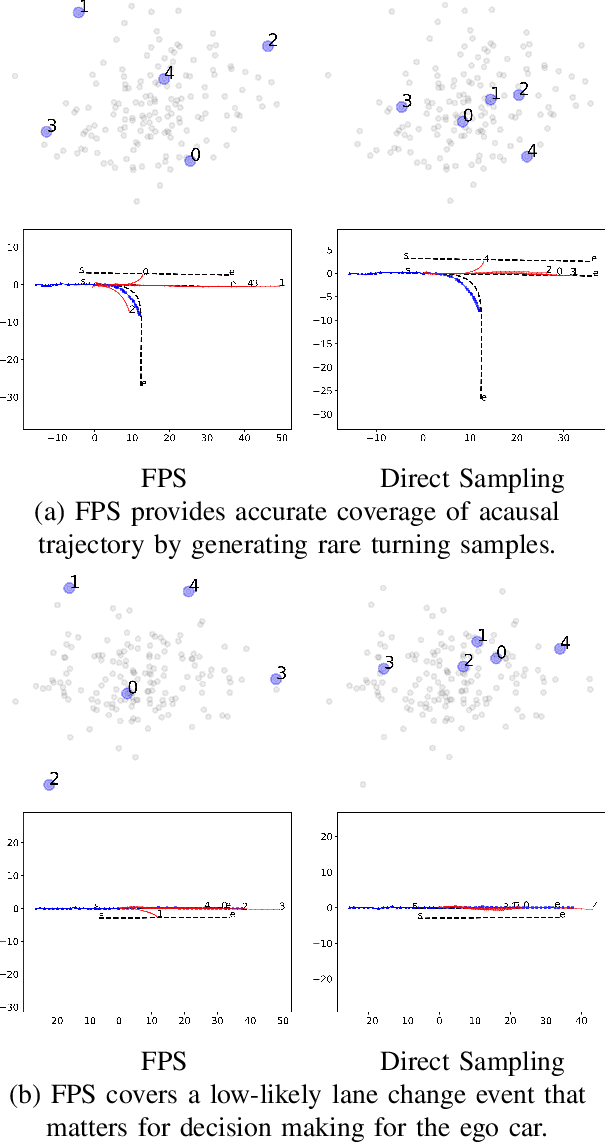
Vehicle trajectory prediction is crucial for autonomous driving and advanced driver assistant systems. While existing approaches may sample from a predicted distribution of vehicle trajectories, they lack the ability to explore it - a key ability for evaluating safety from a planning and verification perspective. In this work, we devise a novel approach for generating realistic and diverse vehicle trajectories. We extend the generative adversarial network (GAN) framework with a low-dimensional approximate semantic space, and shape that space to capture semantics such as merging and turning. We sample from this space in a way that mimics the predicted distribution, but allows us to control coverage of semantically distinct outcomes. We validate our approach on a publicly available dataset and show results that achieve state of the art prediction performance, while providing improved coverage of the space of predicted trajectory semantics.