 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic Sorter: A Unified Planning Framework for Online Shape Estimation and Real-Time Pose Inference
May 29, 2026Robotics manipulation usually assumes that the shape and pose of the object are known to the robot prior to motion planning. However, precise geometric information is not always available in practice, and pose inference suffers from sensor uncertainties and view occlusion. In this work, we propose a unified model-based geometric framework integrating robotic haptic perception, modeling, and manipulation planning. Our novelties involve: \textit{i)} Introducing Bayesian Optimization (BO) to guide the haptic exploration for object shape inference, where superellipses are used to approximate geometric boundary; \textit{ii)} Adaptive formulation of manipulation potential encoding object geometry for quasi-static robot-object interaction; \textit{iii)} Proposing an online Ordinary Differential Equation (ODE) for real-time pose inference based on model prediction and tactile feedback. We deploy our system on a 2D robotic sorting task, and vary object geometries to validate the robustness and generalizability of our framework in both simulation and a real-world multi-arm setup.
A Planning Framework for Stable Robust Multi-Contact Manipulation
Apr 03, 2025



While modeling multi-contact manipulation as a quasi-static mechanical process transitioning between different contact equilibria, we propose formulating it as a planning and optimization problem, explicitly evaluating (i) contact stability and (ii) robustness to sensor noise. Specifically, we conduct a comprehensive study on multi-manipulator control strategies, focusing on dual-arm execution in a planar peg-in-hole task and extending it to the Multi-Manipulator Multiple Peg-in-Hole (MMPiH) problem to explore increased task complexity. Our framework employs Dynamic Movement Primitives (DMPs) to parameterize desired trajectories and Black-Box Optimization (BBO) with a comprehensive cost function incorporating friction cone constraints, squeeze forces, and stability considerations. By integrating parallel scenario training, we enhance the robustness of the learned policies. To evaluate the friction cone cost in experiments, we test the optimal trajectories computed for various contact surfaces, i.e., with different coefficients of friction. The stability cost is analytical explained and tested its necessity in simulation. The robustness performance is quantified through variations of hole pose and chamfer size in simulation and experiment. Results demonstrate that our approach achieves consistently high success rates in both the single peg-in-hole and multiple peg-in-hole tasks, confirming its effectiveness and generalizability. The video can be found at https://youtu.be/IU0pdnSd4tE.
Sensorized gripper for human demonstrations
Mar 19, 2025



Ease of programming is a key factor in making robots ubiquitous in unstructured environments. In this work, we present a sensorized gripper built with off-the-shelf parts, used to record human demonstrations of a box in box assembly task. With very few trials of short interval timings each, we show that a robot can repeat the task successfully. We adopt a Cartesian approach to robot motion generation by computing the joint space solution while concurrently solving for the optimal robot position, to maximise manipulability. The statistics of the human demonstration are extracted using Gaussian Mixture Models (GMM) and the robot is commanded using impedance control.
Path Planning in Complex Environments with Superquadrics and Voronoi-Based Orientation
Nov 08, 2024



Path planning in narrow passages is a challenging problem in various applications. Traditional planning algorithms often face challenges in complex environments like mazes and traps, where narrow entrances require special orientation control for successful navigation. In this work, we present a novel approach that combines superquadrics (SQ) representation and Voronoi diagrams to solve the narrow passage problem in both 2D and 3D environment. Our method utilizes the SQ formulation to expand obstacles, eliminating impassable passages, while Voronoi hyperplane ensures maximum clearance path. Additionally, the hyperplane provides a natural reference for robot orientation, aligning its long axis with the passage direction. We validate our framework through a 2D object retrieval task and 3D drone simulation, demonstrating that our approach outperforms classical planners and a cutting-edge drone planner by ensuring passable trajectories with maximum clearance.
Planning for quasi-static manipulation tasks via an intrinsic haptic metric
Nov 07, 2024



Contact-rich manipulation often requires strategic interactions with objects, such as pushing to accomplish specific tasks. We propose a novel scenario where a robot inserts a book into a crowded shelf by pushing aside neighboring books to create space before slotting the new book into place. Classical planning algorithms fail in this context due to limited space and their tendency to avoid contact. Additionally, they do not handle indirectly manipulable objects or consider force interactions. Our key contributions are: i) re-framing quasi-static manipulation as a planning problem on an implicit manifold derived from equilibrium conditions; ii) utilizing an intrinsic haptic metric instead of ad-hoc cost functions; and iii) proposing an adaptive algorithm that simultaneously updates robot states, object positions, contact points, and haptic distances. We evaluate our method on such crowded bookshelf insertion task but it is a general formulation to rigid bodies manipulation tasks. We propose proxies to capture contact point and force, with superellipse to represent objects. This simplified model guarantee the differentiablity. Our framework autonomously discovers strategic wedging-in policies while our simplified contact model achieves behavior similar to real world scenarios. We also vary the stiffness and initial positions to analysis our framework comprehensively. The video can be found at https://youtu.be/eab8umZ3AQ0.
Control of a pendulum system: From simulation to reality
Dec 08, 2023



Control theory deals with the study of controlling dynamical systems. Robots today are growing increasingly complex and moving out of factory floors to real world environment. These robots have to interact with real world environment factors such as disturbances and this requires the robot to have a control system that is robust. Testing control algorithms on robots in real world environment can pose critical safety issues and can be financially expensive. This has resulted in a heavy emphasis on using simulation to test control algorithms before deploying them in real world environments. Designing control algorithms is an iterative process that starts with modelling the target system in simulation, designing a controller, testing the controller in simulation and then changing the controller parameters to design a better controller. This report explores how an approximated system model of a target hardware system can be developed, which can then be used to design a LQR controller for the target system. The controller is then tested under a disturbance, on hardware and in simulation, and the system response is recorded. The system response from hardware and simulation are then compared to validate the use of approximated system models in simulation for designing and testing control algorithms.
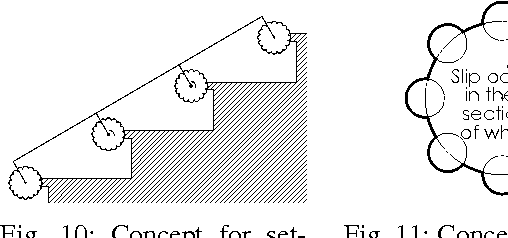
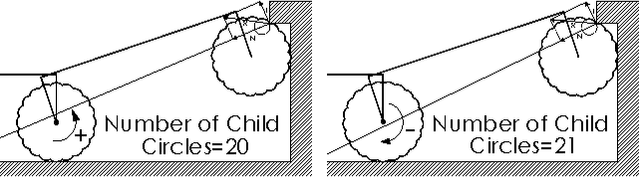
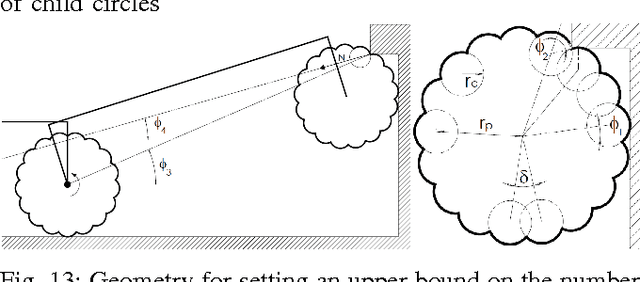
Design of a Robust Stair Climbing Compliant Modular Robot to Tackle Overhang on Stairs
Jul 11, 2016
This paper discusses the concept and parameter design of a Robust Stair Climbing Compliant Modular Robot, capable of tackling stairs with overhangs. Modifying the geometry of the periphery of the wheels of our robot helps in tackling overhangs. Along with establishing a concept design, robust design parameters are set to minimize performance variation. The Grey-based Taguchi Method is adopted for providing an optimal setting for the design parameters of the robot. The robot prototype is shown to have successfully scaled stairs of varying dimensions, with overhang, thus corroborating the analysis performed.