 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dual-Action Fabric-Based Soft Robotic Glove for Ergonomic Hand Rehabilitation
Apr 01, 2026Hand impairment following neurological disorders substantially limits independence in activities of daily living, motivating the development of effective assistive and rehabilitation strategies. Soft robotic gloves have attracted growing interest in this context, yet persistent challenges in customization, ergonomic fit, and flexion-extension actuation constrain their clinical utility. Here, we present a dual-action fabric-based soft robotic glove incorporating customized actuators aligned with individual finger joints. The glove comprises five independently controlled dual-action actuators supporting finger flexion and extension, together with a dedicated thumb abduction actuator. Leveraging computer numerical control heat sealing technology, we fabricated symmetrical-chamber actuators that adopt a concave outer surface upon inflation, thereby maximizing finger contact area and improving comfort. Systematic characterization confirmed that the actuators generate sufficient joint moment and fingertip force for ADL-relevant tasks, and that the complete glove system produces adequate grasping force for common household objects. A preliminary study with ten healthy subjects demonstrated that active glove assistance significantly reduces forearm muscle activity during object manipulation. A pilot feasibility study with three individuals with cervical spinal cord injury across seven functional tasks indicated that glove assistance promotes more natural grasp patterns and reduces reliance on tenodesis grasp, although at the cost of increased task completion time attributable to the current actuation interface. This customizable, ergonomic design represents a practical step toward personalized hand rehabilitation and assistive robotics.
Hardware-Efficient EMG Decoding for Next-Generation Hand Prostheses
May 31, 2024



Advancements in neural engineering have enabled the development of Robotic Prosthetic Hands (RPHs) aimed at restoring hand functionality. Current commercial RPHs offer limited control through basic on/off commands. Recent progresses in machine learning enable finger movement decoding with higher degrees of freedom, yet the high computational complexity of such models limits their application in portable devices. Future RPH designs must balance portability, low power consumption, and high decoding accuracy to be practical for individuals with disabilities. To this end, we introduce a novel attractor-based neural network to realize on-chip movement decoding for next-generation portable RPHs. The proposed architecture comprises an encoder, an attention layer, an attractor network, and a refinement regressor. We tested our model on four healthy subjects and achieved a decoding accuracy of 80.3%. Our proposed model is over 120 and 50 times more compact compared to state-of-the-art LSTM and CNN models, respectively, with comparable (or superior) decoding accuracy. Therefore, it exhibits minimal hardware complexity and can be effectively integrated as a System-on-Chip.
A Portable and Passive Gravity Compensation Arm Support for Drone Teleoperation
Nov 10, 2021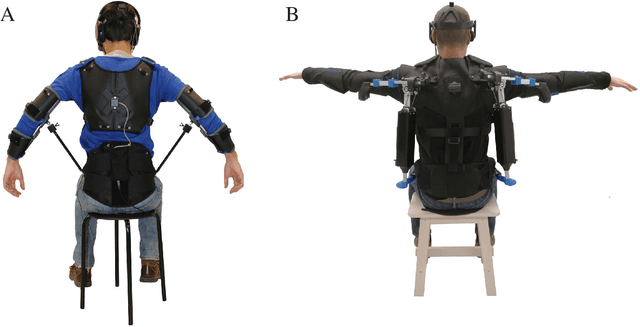
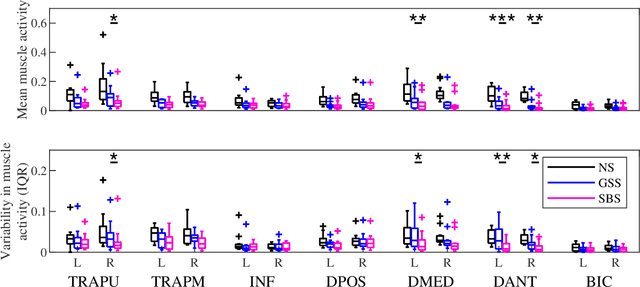
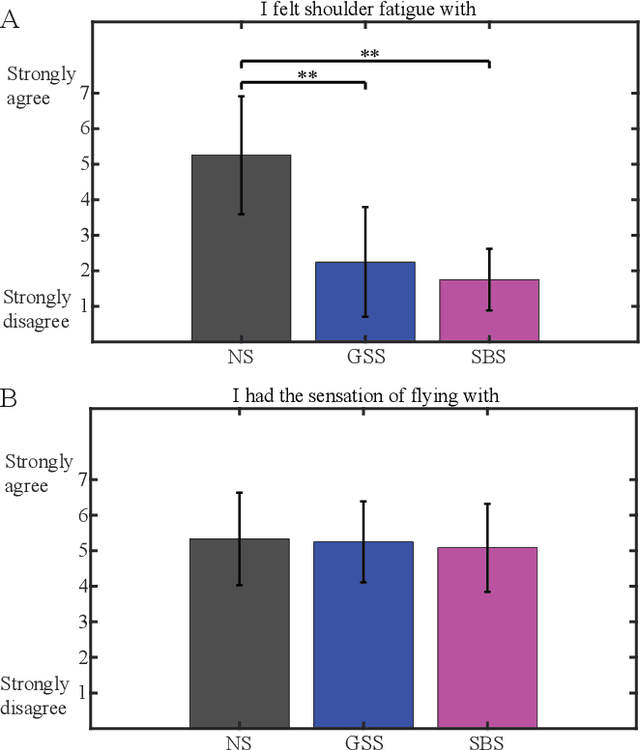
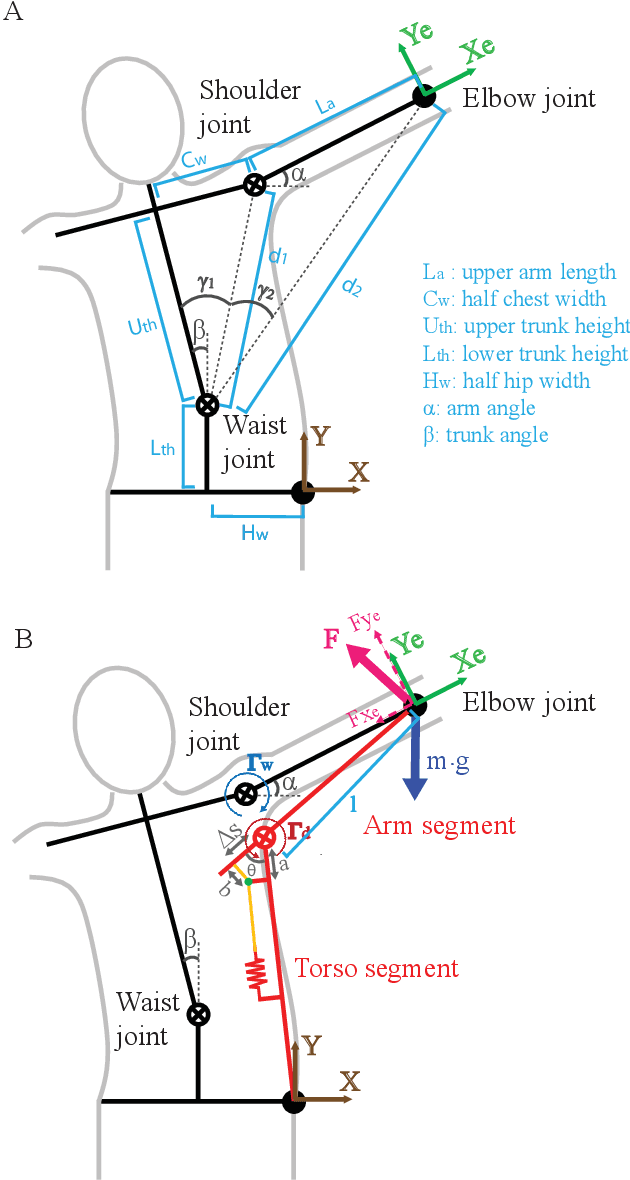
Gesture-based interfaces are often used to achieve a more natural and intuitive teleoperation of robots. Yet, sometimes, gesture control requires postures or movements that cause significant fatigue to the user. In a previous user study, we demonstrated that na\"ive users can control a fixed-wing drone with torso movements while their arms are spread out. However, this posture induced significant arm fatigue. In this work, we present a passive arm support that compensates the arm weight with a mean torque error smaller than 0.005 N/kg for more than 97% of the range of motion used by subjects to fly, therefore reducing muscular fatigue in the shoulder of on average 58%. In addition, this arm support is designed to fit users from the body dimension of the 1st percentile female to the 99th percentile male. The performance analysis of the arm support is described with a mechanical model and its implementation is validated with both a mechanical characterization and a user study, which measures the flight performance, the shoulder muscle activity and the user acceptance.
Enhancing human bodies with extra robotic arms and fingers: The Neural Resource Allocation Problem
Mar 31, 2021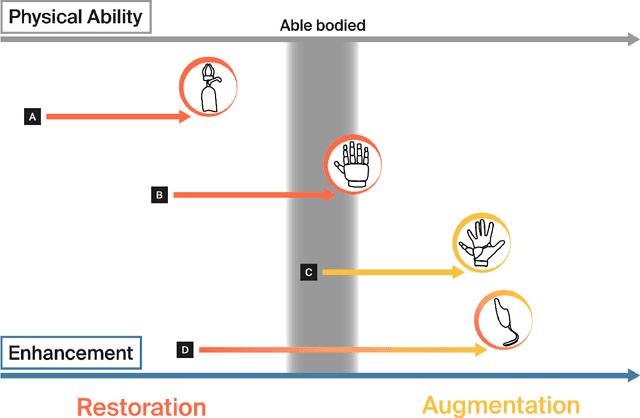
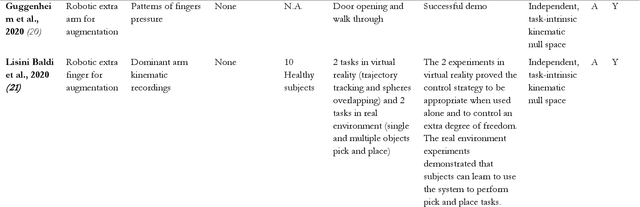
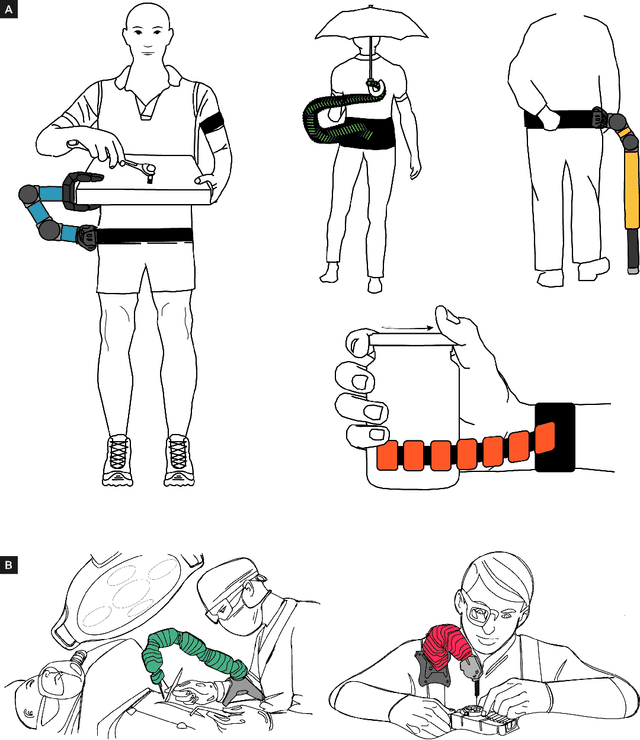
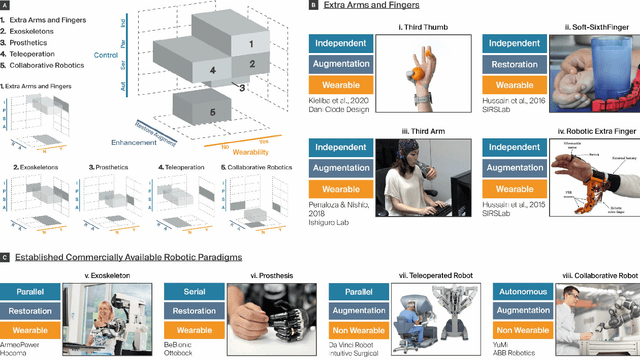
The emergence of robot-based body augmentation promises exciting innovations that will inform robotics, human-machine interaction, and wearable electronics. Even though augmentative devices like extra robotic arms and fingers in many ways build on restorative technologies, they introduce unique challenges for bidirectional human-machine collaboration. Can humans adapt and learn to operate a new limb collaboratively with their biological limbs without sacrificing their physical abilities? To successfully achieve robotic body augmentation, we need to ensure that by giving a person an additional (artificial) limb, we are not in fact trading off an existing (biological) one. In this manuscript, we introduce the "Neural Resource Allocation" problem, which distinguishes body augmentation from existing robotics paradigms such as teleoperation and prosthetics. We discuss how to allow the effective and effortless voluntary control of augmentative devices without compromising the voluntary control of the biological body. In reviewing the relevant literature on extra robotic fingers and limbs we critically assess the range of potential solutions available for the "Neural Resource Allocation" problem. For this purpose, we combine multiple perspectives from engineering and neuroscience with considerations from human-machine interaction, sensory-motor integration, ethics and law. Altogether we aim to define common foundations and operating principles for the successful implementation of motor augmentation.