 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dual-Action Fabric-Based Soft Robotic Glove for Ergonomic Hand Rehabilitation
Apr 01, 2026Hand impairment following neurological disorders substantially limits independence in activities of daily living, motivating the development of effective assistive and rehabilitation strategies. Soft robotic gloves have attracted growing interest in this context, yet persistent challenges in customization, ergonomic fit, and flexion-extension actuation constrain their clinical utility. Here, we present a dual-action fabric-based soft robotic glove incorporating customized actuators aligned with individual finger joints. The glove comprises five independently controlled dual-action actuators supporting finger flexion and extension, together with a dedicated thumb abduction actuator. Leveraging computer numerical control heat sealing technology, we fabricated symmetrical-chamber actuators that adopt a concave outer surface upon inflation, thereby maximizing finger contact area and improving comfort. Systematic characterization confirmed that the actuators generate sufficient joint moment and fingertip force for ADL-relevant tasks, and that the complete glove system produces adequate grasping force for common household objects. A preliminary study with ten healthy subjects demonstrated that active glove assistance significantly reduces forearm muscle activity during object manipulation. A pilot feasibility study with three individuals with cervical spinal cord injury across seven functional tasks indicated that glove assistance promotes more natural grasp patterns and reduces reliance on tenodesis grasp, although at the cost of increased task completion time attributable to the current actuation interface. This customizable, ergonomic design represents a practical step toward personalized hand rehabilitation and assistive robotics.
A wearable haptic device for edge and surface simulation
Apr 01, 2026Object manipulation is fundamental to virtual reality (VR) applications, yet conventional fingertip haptic devices fail to render certain tactile features relevant for immersive and precise interactions, as i.e. detection of edges. This paper presents a compact, lightweight fingertip haptic device (24.3 g) that delivers distinguishable surface and edge contact feedback through a novel dual-motor mechanism. Pressure distribution characterization using a 6 x 6 flexible sensor array demonstrates distinct contact patterns between the two stimulation modes. A preliminary user study with five participants achieved 93% average classification accuracy across four conditions (edge/surface contact with light/heavy pressure), with mean response times of 2.79 seconds. The results indicate that the proposed device can effectively convey edge and surface tactile cues, potentially enhancing object manipulation fidelity in VR environments.
Geometry-based pneumatic actuators for soft robotics
Feb 27, 2026Soft pneumatic actuators enable safe human-machine interaction with lightweight and powerful applied parts. On the other side, they suffer design limitations as regards complex actuation patterns, including minimum bending radii, multi-states capabilities and structural stability. We present geometry-based pneumatic actuators (GPAs), a design and implementation approach that introduces constraint layers with configurable CNC heat-sealed chambers. The approach achieves predictable deformation, near-zero bending radii, multi-states actuation, and enables customizable and repeatable complex actuated geometries. Mathematical modeling reveals predictable linear angle transformations and validates nonlinear torque-angle relationships across diverse configurations. We demonstrate versatility of the GPAs approach through three applications: a 49 g wrist exoskeleton reducing muscle activity by up to 51%, a 30.8 g haptic interface delivering 8 N force feedback with fast response, and a 208 g bipedal robot achieving multi-gait locomotion. GPAs establish a configurable platform for next-generation wearable robotics, haptic systems, and soft locomotion devices.
A Soft Fabric-Based Thermal Haptic Device for VR and Teleoperation
Aug 28, 2025This paper presents a novel fabric-based thermal-haptic interface for virtual reality and teleoperation. It integrates pneumatic actuation and conductive fabric with an innovative ultra-lightweight design, achieving only 2~g for each finger unit. By embedding heating elements within textile pneumatic chambers, the system delivers modulated pressure and thermal stimuli to fingerpads through a fully soft, wearable interface. Comprehensive characterization demonstrates rapid thermal modulation with heating rates up to 3$^{\circ}$C/s, enabling dynamic thermal feedback for virtual or teleoperation interactions. The pneumatic subsystem generates forces up to 8.93~N at 50~kPa, while optimization of fingerpad-actuator clearance enhances cooling efficiency with minimal force reduction. Experimental validation conducted with two different user studies shows high temperature identification accuracy (0.98 overall) across three thermal levels, and significant manipulation improvements in a virtual pick-and-place tasks. Results show enhanced success rates (88.5\% to 96.4\%, p = 0.029) and improved force control precision (p = 0.013) when haptic feedback is enabled, validating the effectiveness of the integrated thermal-haptic approach for advanced human-machine interaction applications.
Flexible Disaster Response of Tomorrow -- Final Presentation and Evaluation of the CENTAURO System
Sep 19, 2019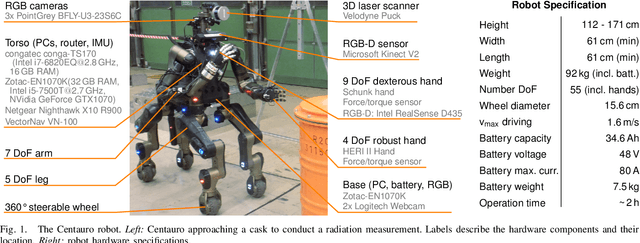
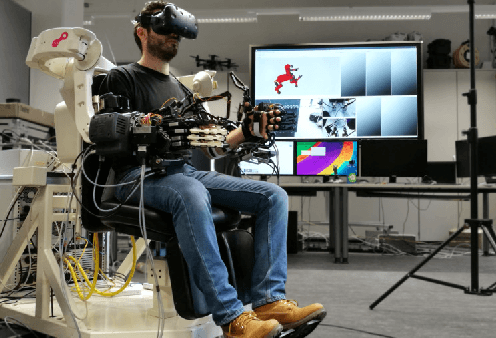
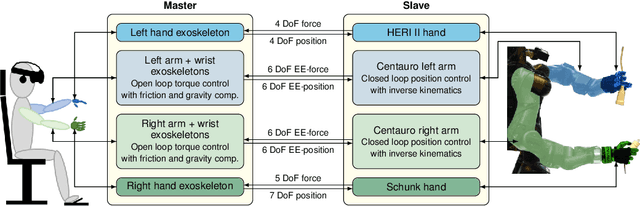
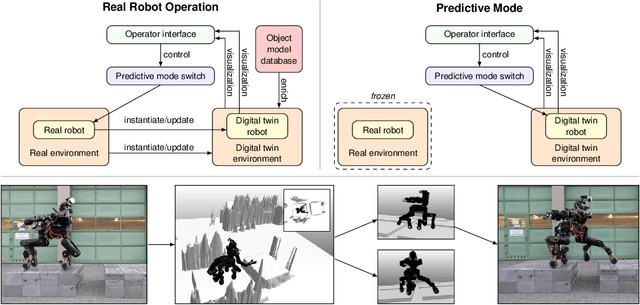
Mobile manipulation robots have high potential to support rescue forces in disaster-response missions. Despite the difficulties imposed by real-world scenarios, robots are promising to perform mission tasks from a safe distance. In the CENTAURO project, we developed a disaster-response system which consists of the highly flexible Centauro robot and suitable control interfaces including an immersive tele-presence suit and support-operator controls on different levels of autonomy. In this article, we give an overview of the final CENTAURO system. In particular, we explain several high-level design decisions and how those were derived from requirements and extensive experience of Kerntechnische Hilfsdienst GmbH, Karlsruhe, Germany (KHG). We focus on components which were recently integrated and report about a systematic evaluation which demonstrated system capabilities and revealed valuable insights.