 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera-Based Localization and Enhanced Normalized Mutual Information
Dec 20, 2024



Robust and fine localization algorithms are crucial for autonomous driving. For the production of such vehicles as a commodity, affordable sensing solutions and reliable localization algorithms must be designed. This work considers scenarios where the sensor data comes from images captured by an inexpensive camera mounted on the vehicle and where the vehicle contains a fine global map. Such localization algorithms typically involve finding the section in the global map that best matches the captured image. In harsh environments, both the global map and the captured image can be noisy. Because of physical constraints on camera placement, the image captured by the camera can be viewed as a noisy perspective transformed version of the road in the global map. Thus, an optimal algorithm should take into account the unequal noise power in various regions of the captured image, and the intrinsic uncertainty in the global map due to environmental variations. This article briefly reviews two matching methods: (i) standard inner product (SIP) and (ii) normalized mutual information (NMI). It then proposes novel and principled modifications to improve the performance of these algorithms significantly in noisy environments. These enhancements are inspired by the physical constraints associated with autonomous vehicles. They are grounded in statistical signal processing and, in some context, are provably better. Numerical simulations demonstrate the effectiveness of such modifications.
Machine learning algorithms to predict the risk of rupture of intracranial aneurysms: a systematic review
Dec 06, 2024Purpose: Subarachnoid haemorrhage is a potentially fatal consequence of intracranial aneurysm rupture, however, it is difficult to predict if aneurysms will rupture. Prophylactic treatment of an intracranial aneurysm also involves risk, hence identifying rupture-prone aneurysms is of substantial clinical importance. This systematic review aims to evaluate the performance of machine learning algorithms for predicting intracranial aneurysm rupture risk. Methods: MEDLINE, Embase, Cochrane Library and Web of Science were searched until December 2023. Studies incorporating any machine learning algorithm to predict the risk of rupture of an intracranial aneurysm were included. Risk of bias was assessed using the Prediction Model Risk of Bias Assessment Tool (PROBAST). PROSPERO registration: CRD42023452509. Results: Out of 10,307 records screened, 20 studies met the eligibility criteria for this review incorporating a total of 20,286 aneurysm cases. The machine learning models gave a 0.66-0.90 range for performance accuracy. The models were compared to current clinical standards in six studies and gave mixed results. Most studies posed high or unclear risks of bias and concerns for applicability, limiting the inferences that can be drawn from them. There was insufficient homogenous data for a meta-analysis. Conclusions: Machine learning can be applied to predict the risk of rupture for intracranial aneurysms. However, the evidence does not comprehensively demonstrate superiority to existing practice, limiting its role as a clinical adjunct. Further prospective multicentre studies of recent machine learning tools are needed to prove clinical validation before they are implemented in the clinic.
Input-Based Ensemble-Learning Method for Dynamic Memory Configuration of Serverless Computing Functions
Nov 12, 2024



In today's Function-as-a-Service offerings, a programmer is usually responsible for configuring function memory for its successful execution, which allocates proportional function resources such as CPU and network. However, right-sizing the function memory force developers to speculate performance and make ad-hoc configuration decisions. Recent research has highlighted that a function's input characteristics, such as input size, type and number of inputs, significantly impact its resource demand, run-time performance and costs with fluctuating workloads. This correlation further makes memory configuration a non-trivial task. On that account, an input-aware function memory allocator not only improves developer productivity by completely hiding resource-related decisions but also drives an opportunity to reduce resource wastage and offer a finer-grained cost-optimised pricing scheme. Therefore, we present MemFigLess, a serverless solution that estimates the memory requirement of a serverless function with input-awareness. The framework executes function profiling in an offline stage and trains a multi-output Random Forest Regression model on the collected metrics to invoke input-aware optimal configurations. We evaluate our work with the state-of-the-art approaches on AWS Lambda service to find that MemFigLess is able to capture the input-aware resource relationships and allocate upto 82% less resources and save up to 87% run-time costs.
* 10 pages, 2 tables, 28 figures, accepted conference paper - UCC'24
Letter to the Editor: What are the legal and ethical considerations of submitting radiology reports to ChatGPT?
May 09, 2024This letter critically examines the recent article by Infante et al. assessing the utility of large language models (LLMs) like GPT-4, Perplexity, and Bard in identifying urgent findings in emergency radiology reports. While acknowledging the potential of LLMs in generating labels for computer vision, concerns are raised about the ethical implications of using patient data without explicit approval, highlighting the necessity of stringent data protection measures under GDPR.
Artificial intelligence for abnormality detection in high volume neuroimaging: a systematic review and meta-analysis
May 09, 2024



Purpose: Most studies evaluating artificial intelligence (AI) models that detect abnormalities in neuroimaging are either tested on unrepresentative patient cohorts or are insufficiently well-validated, leading to poor generalisability to real-world tasks. The aim was to determine the diagnostic test accuracy and summarise the evidence supporting the use of AI models performing first-line, high-volume neuroimaging tasks. Methods: Medline, Embase, Cochrane library and Web of Science were searched until September 2021 for studies that temporally or externally validated AI capable of detecting abnormalities in first-line CT or MR neuroimaging. A bivariate random-effects model was used for meta-analysis where appropriate. PROSPERO: CRD42021269563. Results: Only 16 studies were eligible for inclusion. Included studies were not compromised by unrepresentative datasets or inadequate validation methodology. Direct comparison with radiologists was available in 4/16 studies. 15/16 had a high risk of bias. Meta-analysis was only suitable for intracranial haemorrhage detection in CT imaging (10/16 studies), where AI systems had a pooled sensitivity and specificity 0.90 (95% CI 0.85 - 0.94) and 0.90 (95% CI 0.83 - 0.95) respectively. Other AI studies using CT and MRI detected target conditions other than haemorrhage (2/16), or multiple target conditions (4/16). Only 3/16 studies implemented AI in clinical pathways, either for pre-read triage or as post-read discrepancy identifiers. Conclusion: The paucity of eligible studies reflects that most abnormality detection AI studies were not adequately validated in representative clinical cohorts. The few studies describing how abnormality detection AI could impact patients and clinicians did not explore the full ramifications of clinical implementation.
A self-supervised text-vision framework for automated brain abnormality detection
May 05, 2024



Artificial neural networks trained on large, expert-labelled datasets are considered state-of-the-art for a range of medical image recognition tasks. However, categorically labelled datasets are time-consuming to generate and constrain classification to a pre-defined, fixed set of classes. For neuroradiological applications in particular, this represents a barrier to clinical adoption. To address these challenges, we present a self-supervised text-vision framework that learns to detect clinically relevant abnormalities in brain MRI scans by directly leveraging the rich information contained in accompanying free-text neuroradiology reports. Our training approach consisted of two-steps. First, a dedicated neuroradiological language model - NeuroBERT - was trained to generate fixed-dimensional vector representations of neuroradiology reports (N = 50,523) via domain-specific self-supervised learning tasks. Next, convolutional neural networks (one per MRI sequence) learnt to map individual brain scans to their corresponding text vector representations by optimising a mean square error loss. Once trained, our text-vision framework can be used to detect abnormalities in unreported brain MRI examinations by scoring scans against suitable query sentences (e.g., 'there is an acute stroke', 'there is hydrocephalus' etc.), enabling a range of classification-based applications including automated triage. Potentially, our framework could also serve as a clinical decision support tool, not only by suggesting findings to radiologists and detecting errors in provisional reports, but also by retrieving and displaying examples of pathologies from historical examinations that could be relevant to the current case based on textual descriptors.
Reinforcement Learning (RL) Augmented Cold Start Frequency Reduction in Serverless Computing
Aug 15, 2023



Function-as-a-Service is a cloud computing paradigm offering an event-driven execution model to applications. It features serverless attributes by eliminating resource management responsibilities from developers and offers transparent and on-demand scalability of applications. Typical serverless applications have stringent response time and scalability requirements and therefore rely on deployed services to provide quick and fault-tolerant feedback to clients. However, the FaaS paradigm suffers from cold starts as there is a non-negligible delay associated with on-demand function initialization. This work focuses on reducing the frequency of cold starts on the platform by using Reinforcement Learning. Our approach uses Q-learning and considers metrics such as function CPU utilization, existing function instances, and response failure rate to proactively initialize functions in advance based on the expected demand. The proposed solution was implemented on Kubeless and was evaluated using a normalised real-world function demand trace with matrix multiplication as the workload. The results demonstrate a favourable performance of the RL-based agent when compared to Kubeless' default policy and function keep-alive policy by improving throughput by up to 8.81% and reducing computation load and resource wastage by up to 55% and 37%, respectively, which is a direct outcome of reduced cold starts.
A Deep Recurrent-Reinforcement Learning Method for Intelligent AutoScaling of Serverless Functions
Aug 11, 2023



Function-as-a-Service (FaaS) introduces a lightweight, function-based cloud execution model that finds its relevance in applications like IoT-edge data processing and anomaly detection. While CSP offer a near-infinite function elasticity, these applications often experience fluctuating workloads and stricter performance constraints. A typical CSP strategy is to empirically determine and adjust desired function instances, "autoscaling", based on monitoring-based thresholds such as CPU or memory, to cope with demand and performance. However, threshold configuration either requires expert knowledge, historical data or a complete view of environment, making autoscaling a performance bottleneck lacking an adaptable solution.RL algorithms are proven to be beneficial in analysing complex cloud environments and result in an adaptable policy that maximizes the expected objectives. Most realistic cloud environments usually involve operational interference and have limited visibility, making them partially observable. A general solution to tackle observability in highly dynamic settings is to integrate Recurrent units with model-free RL algorithms and model a decision process as a POMDP. Therefore, in this paper, we investigate a model-free Recurrent RL agent for function autoscaling and compare it against the model-free Proximal Policy Optimisation (PPO) algorithm. We explore the integration of a LSTM network with the state-of-the-art PPO algorithm to find that under our experimental and evaluation settings, recurrent policies were able to capture the environment parameters and show promising results for function autoscaling. We further compare a PPO-based autoscaling agent with commercially used threshold-based function autoscaling and posit that a LSTM-based autoscaling agent is able to improve throughput by 18%, function execution by 13% and account for 8.4% more function instances.
Investigations on convergence behaviour of Physics Informed Neural Networks across spectral ranges and derivative orders
Jan 07, 2023



An important inference from Neural Tangent Kernel (NTK) theory is the existence of spectral bias (SB), that is, low frequency components of the target function of a fully connected Artificial Neural Network (ANN) being learnt significantly faster than the higher frequencies during training. This is established for Mean Square Error (MSE) loss functions with very low learning rate parameters. Physics Informed Neural Networks (PINNs) are designed to learn the solutions of differential equations (DE) of arbitrary orders; in PINNs the loss functions are obtained as the residues of the conservative form of the DEs and represent the degree of dissatisfaction of the equations. So there has been an open question whether (a) PINNs also exhibit SB and (b) if so, how does this bias vary across the orders of the DEs. In this work, a series of numerical experiments are conducted on simple sinusoidal functions of varying frequencies, compositions and equation orders to investigate these issues. It is firmly established that under normalized conditions, PINNs do exhibit strong spectral bias, and this increases with the order of the differential equation.
Automated triaging of head MRI examinations using convolutional neural networks
Jun 15, 2021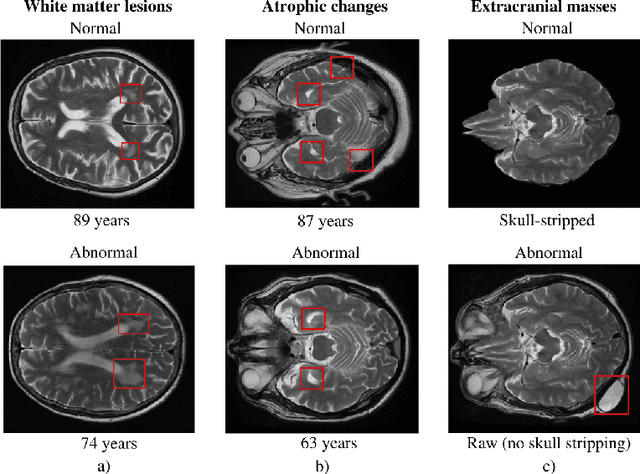
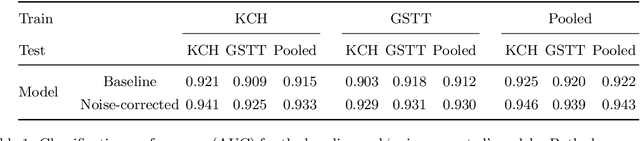
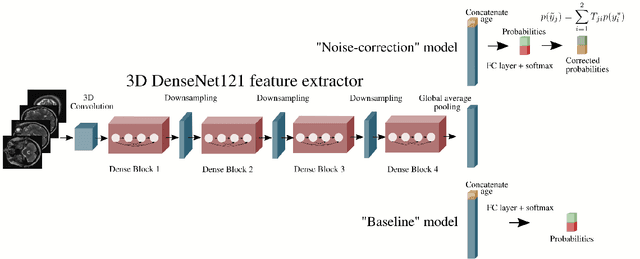
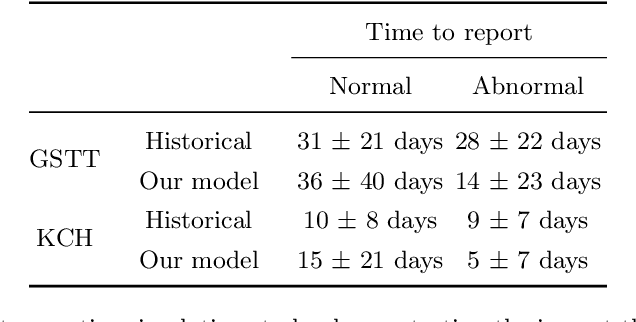
The growing demand for head magnetic resonance imaging (MRI) examinations, along with a global shortage of radiologists, has led to an increase in the time taken to report head MRI scans around the world. For many neurological conditions, this delay can result in increased morbidity and mortality. An automated triaging tool could reduce reporting times for abnormal examinations by identifying abnormalities at the time of imaging and prioritizing the reporting of these scans. In this work, we present a convolutional neural network for detecting clinically-relevant abnormalities in $\text{T}_2$-weighted head MRI scans. Using a validated neuroradiology report classifier, we generated a labelled dataset of 43,754 scans from two large UK hospitals for model training, and demonstrate accurate classification (area under the receiver operating curve (AUC) = 0.943) on a test set of 800 scans labelled by a team of neuroradiologists. Importantly, when trained on scans from only a single hospital the model generalized to scans from the other hospital ($\Delta$AUC $\leq$ 0.02). A simulation study demonstrated that our model would reduce the mean reporting time for abnormal examinations from 28 days to 14 days and from 9 days to 5 days at the two hospitals, demonstrating feasibility for use in a clinical triage environment.