 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePatchBoard: Schema-Grounded State Mutation for Reliable and Auditable LLM Multi-Agent Collaboration
May 28, 2026LLM multi-agent systems often coordinate through natural-language dialogue or loosely structured shared memory, making intermediate state difficult to validate, attribute, and audit. We introduce PatchBoard, a schema-grounded collaboration architecture that replaces inter-agent dialogue with validated JSON Patch mutations over a shared structured state. An Architect agent constructs a task-specific schema and workflow rules, while a deterministic kernel validates each proposed state mutation against schema constraints, role-specific write contracts, and runtime invariants before committing it transactionally. On 630 matched ALFWorld episodes, PatchBoard achieves an 84.6% success rate, compared with 30.8% for LangGraph and 61.6% for Flock, while reducing tokens per successful task to 45.5k, compared with 368.3k and 64.2k, respectively.
ViTaMIn-B: A Reliable and Efficient Visuo-Tactile Bimanual Manipulation Interface
Nov 08, 2025Handheld devices have opened up unprecedented opportunities to collect large-scale, high-quality demonstrations efficiently. However, existing systems often lack robust tactile sensing or reliable pose tracking to handle complex interaction scenarios, especially for bimanual and contact-rich tasks. In this work, we propose ViTaMIn-B, a more capable and efficient handheld data collection system for such tasks. We first design DuoTact, a novel compliant visuo-tactile sensor built with a flexible frame to withstand large contact forces during manipulation while capturing high-resolution contact geometry. To enhance the cross-sensor generalizability, we propose reconstructing the sensor's global deformation as a 3D point cloud and using it as the policy input. We further develop a robust, unified 6-DoF bimanual pose acquisition process using Meta Quest controllers, which eliminates the trajectory drift issue in common SLAM-based methods. Comprehensive user studies confirm the efficiency and high usability of ViTaMIn-B among novice and expert operators. Furthermore, experiments on four bimanual manipulation tasks demonstrate its superior task performance relative to existing systems.
A Synergistic Framework of Nonlinear Acoustic Computing and Reinforcement Learning for Real-World Human-Robot Interaction
May 04, 2025This paper introduces a novel framework integrating nonlinear acoustic computing and reinforcement learning to enhance advanced human-robot interaction under complex noise and reverberation. Leveraging physically informed wave equations (e.g., Westervelt, KZK), the approach captures higher-order phenomena such as harmonic generation and shock formation. By embedding these models in a reinforcement learning-driven control loop, the system adaptively optimizes key parameters (e.g., absorption, beamforming) to mitigate multipath interference and non-stationary noise. Experimental evaluations-covering far-field localization, weak signal detection, and multilingual speech recognition-demonstrate that this hybrid strategy surpasses traditional linear methods and purely data-driven baselines, achieving superior noise suppression, minimal latency, and robust accuracy in demanding real-world scenarios. The proposed system demonstrates broad application prospects in AI hardware, robot, machine audition, artificial audition, and brain-machine interfaces.
Privacy-preserving Traffic Flow Prediction: A Federated Learning Approach
Mar 19, 2020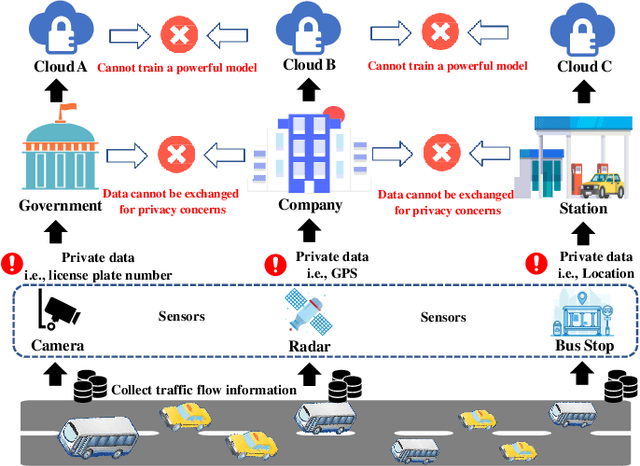
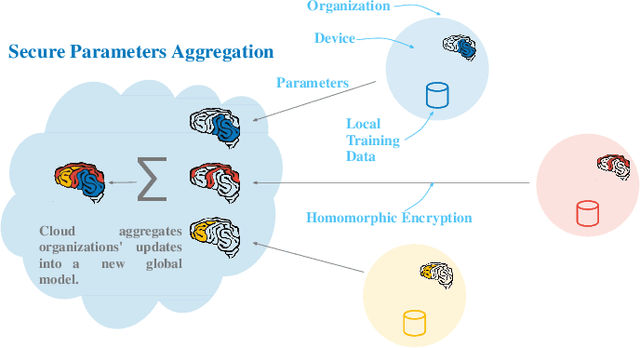
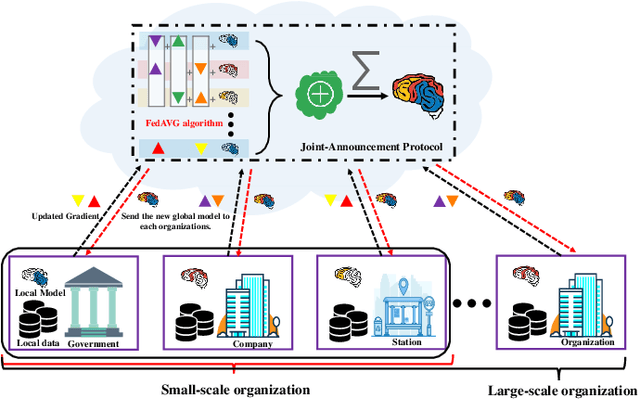
Existing traffic flow forecasting approaches by deep learning models achieve excellent success based on a large volume of datasets gathered by governments and organizations. However, these datasets may contain lots of user's private data, which is challenging the current prediction approaches as user privacy is calling for the public concern in recent years. Therefore, how to develop accurate traffic prediction while preserving privacy is a significant problem to be solved, and there is a trade-off between these two objectives. To address this challenge, we introduce a privacy-preserving machine learning technique named federated learning and propose a Federated Learning-based Gated Recurrent Unit neural network algorithm (FedGRU) for traffic flow prediction. FedGRU differs from current centralized learning methods and updates universal learning models through a secure parameter aggregation mechanism rather than directly sharing raw data among organizations. In the secure parameter aggregation mechanism, we adopt a Federated Averaging algorithm to reduce the communication overhead during the model parameter transmission process. Furthermore, we design a Joint Announcement Protocol to improve the scalability of FedGRU. We also propose an ensemble clustering-based scheme for traffic flow prediction by grouping the organizations into clusters before applying FedGRU algorithm. Through extensive case studies on a real-world dataset, it is shown that FedGRU's prediction accuracy is 90.96% higher than the advanced deep learning models, which confirm that FedGRU can achieve accurate and timely traffic prediction without compromising the privacy and security of raw data.