 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Space Utilization for More Effective Multi-Robot Path Planning
Sep 10, 2021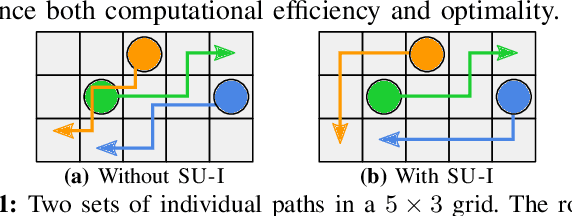
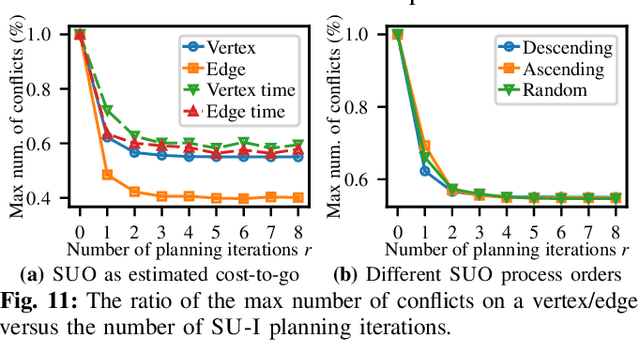
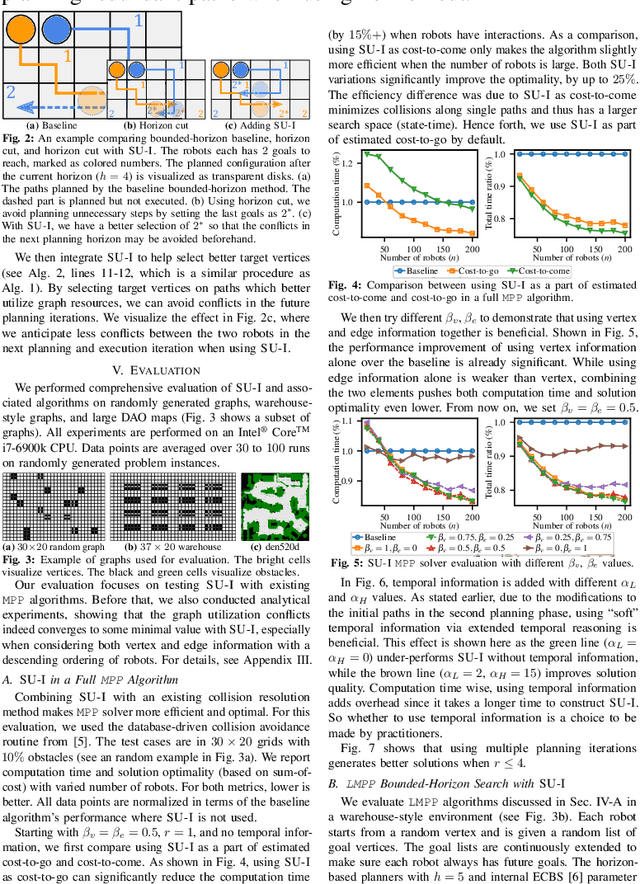

We perform a systematic exploration of the principle of Space Utilization Optimization (SUO) as a heuristic for planning better individual paths in a decoupled multi-robot path planner, with applications to both one-shot and life-long multi-robot path planning problems. We show that the decentralized heuristic set, SU-I, preserves single path optimality and significantly reduces congestion that naturally happens when many paths are planned without coordination. Integration of SU-I into complete planners brings dramatic reductions in computation time due to the significantly reduced number of conflicts and leads to sizable solution optimality gains in diverse evaluation scenarios with medium and large maps, for both one-shot and life-long problem settings.
Visual Foresight Tree for Object Retrieval from Clutter with Nonprehensile Rearrangement
May 06, 2021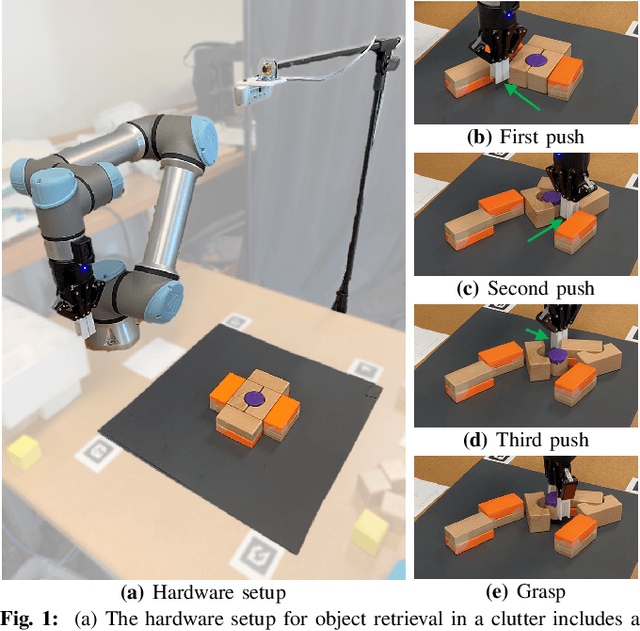
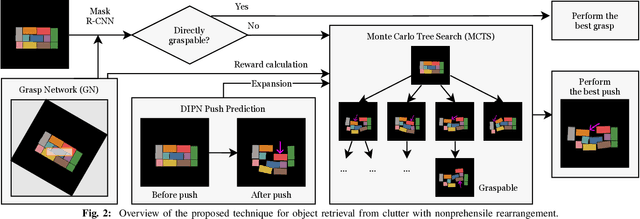
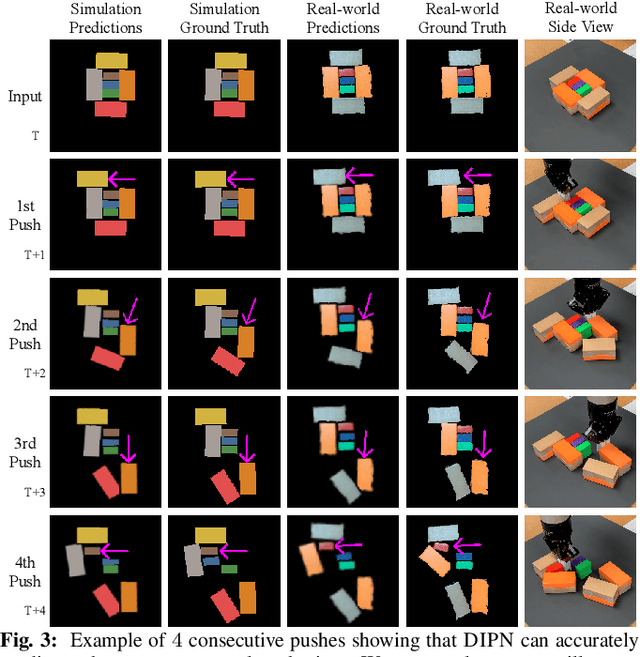
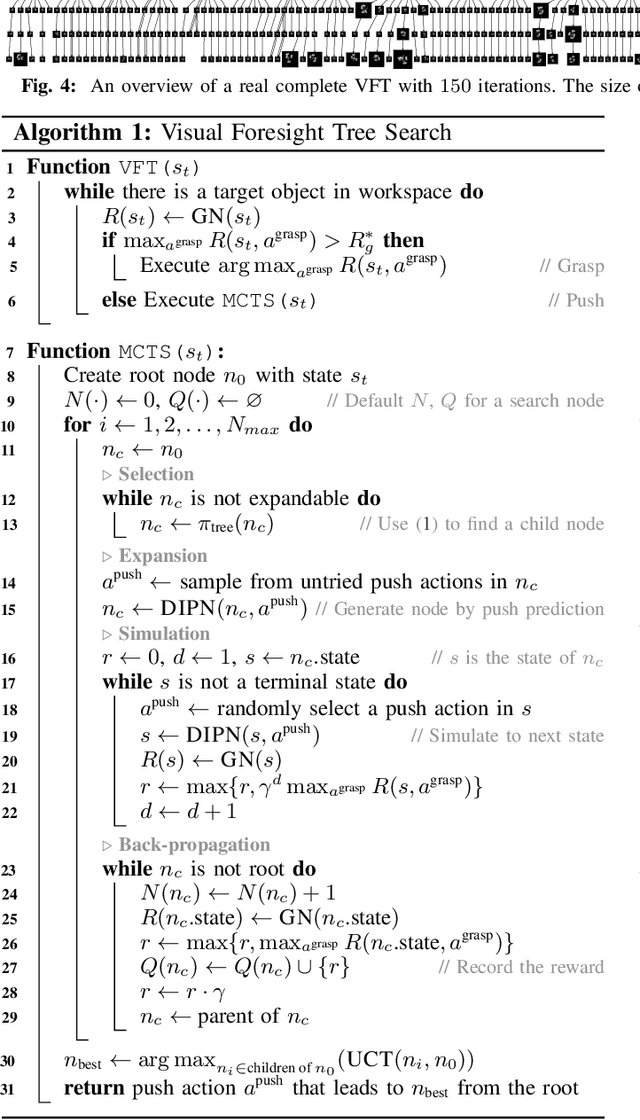
This paper considers the problem of retrieving an object from a set of tightly packed objects by using a combination of robotic pushing and grasping actions. Object retrieval from confined spaces that contain clutter is an important skill for robots in order to effectively operate in households and everyday environments. The proposed solution, Visual Foresight Tree (VFT), cleverly rearranges the clutter surrounding the target object so that it can be grasped easily. Rearrangement with nested non-prehensile actions is challenging as it requires predicting complex object interactions in a combinatorially large configuration space of multiple objects. We first show that a deep neural network can be trained to accurately predict the poses of the packed objects when the robot pushes one of them. The predictive network provides visual foresight and is used in a tree search as a state transition function in the space of scene images. The tree search returns a sequence of consecutive push actions that result in the best arrangement of the clutter for grasping the target object. Experiments in simulation and using a real robot and objects show that the proposed approach outperforms model-free techniques as well as model-based myopic methods both in terms of success rates and the number of executed actions, on several challenging tasks. A video introducing VFT, with robot experiments, is accessible at https://youtu.be/7cL-hmgvyec. Full source code will also be made available upon publication of this manuscript.
Spatial and Temporal Splitting Heuristics for Multi-Robot Motion Planning
Mar 25, 2021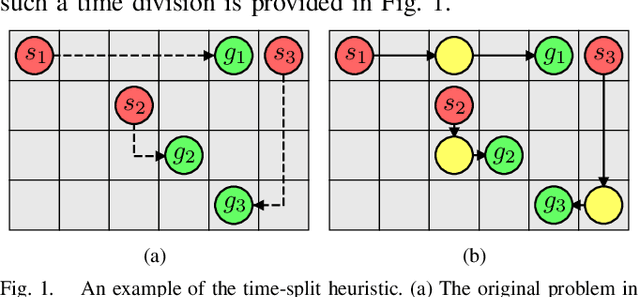
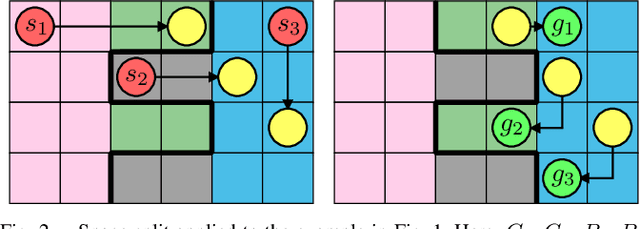
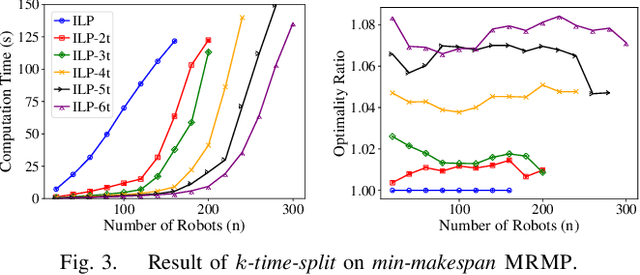
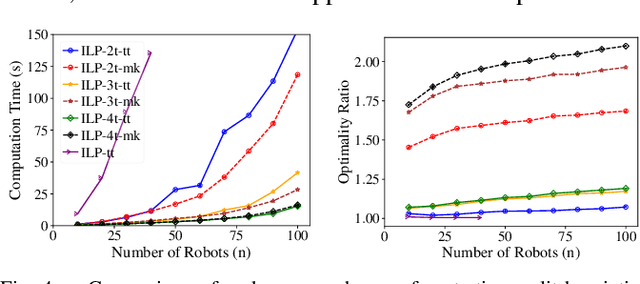
In this work, we systematically examine the application of spatio-temporal splitting heuristics to the Multi-Robot Motion Planning (MRMP) problem in a graph-theoretic setting: a problem known to be NP-hard to optimally solve. Following the divide-and-conquer principle, we design multiple spatial and temporal splitting schemes that can be applied to any existing MRMP algorithm, including integer programming solvers and Enhanced Conflict Based Search, in an orthogonal manner. The combination of a good baseline MRMP algorithm with a proper splitting heuristic proves highly effective, allowing the resolution of problems 10+ times than what is possible previously, as corroborated by extensive numerical evaluations. Notably, spatial partition of problem fusing with the temporal splitting heuristic and the enhanced conflict based search (ECBS) algorithm increases the scalability of ECBS on large and challenging DAO maps by 5--15 folds with negligible impact on solution optimality.
DIPN: Deep Interaction Prediction Network with Application to Clutter Removal
Nov 09, 2020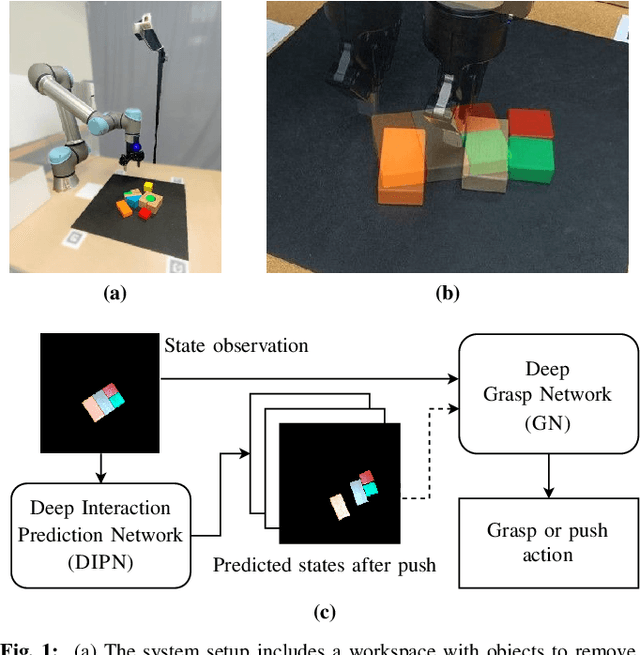
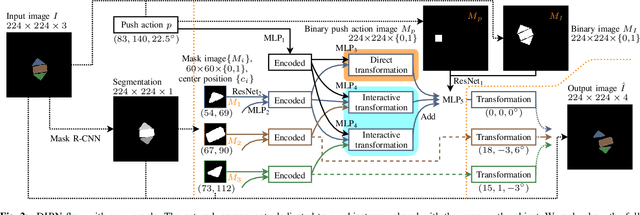
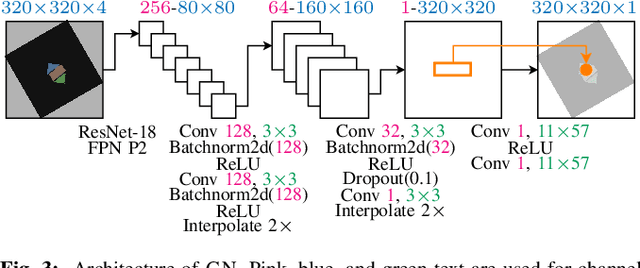
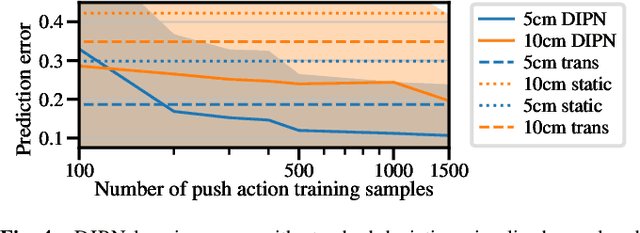
We propose a Deep Interaction Prediction Network (DIPN) for learning to predict complex interactions that ensue as a robot end-effector pushes multiple objects, whose physical properties, including size, shape, mass, and friction coefficients may be unknown a priori. DIPN "imagines" the effect of a push action and generates an accurate synthetic image of the predicted outcome. DIPN is shown to be sample efficient when trained in simulation or with a real robotic system. The high accuracy of DIPN allows direct integration with a grasp network, yielding a robotic manipulation system capable of executing challenging clutter removal tasks while being trained in a fully self-supervised manner. The overall network demonstrates intelligent behavior in selecting proper actions between push and grasp for completing clutter removal tasks and significantly outperforms the previous state-of-the-art. Remarkably, DIPN achieves even better performance on the real robotic hardware system than in simulation. Selected evaluation video clips, code, and experiments log are available at https://github.com/rutgers-arc-lab/dipn.
Computing High-Quality Clutter Removal Solutions for Multiple Robots
Jul 09, 2020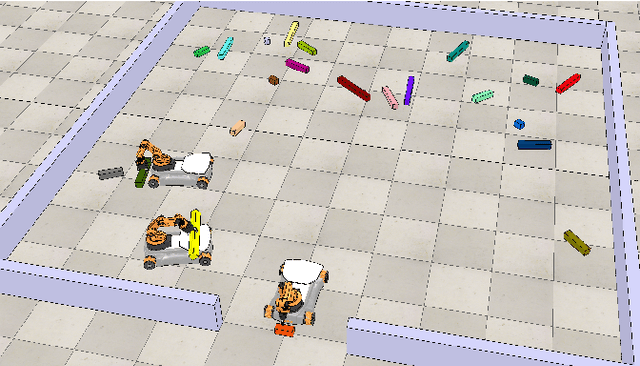
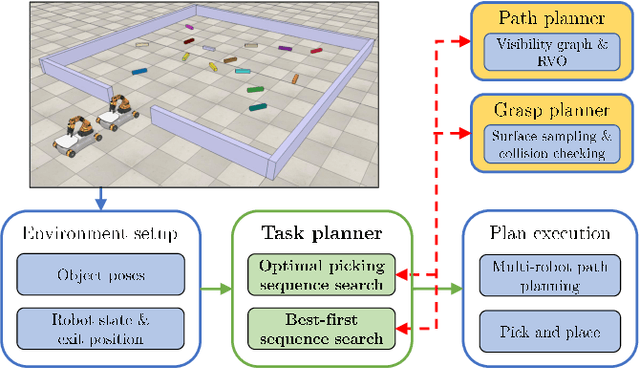
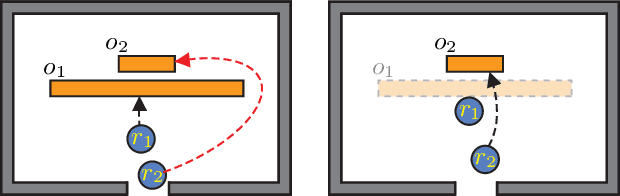
We investigate the task and motion planning problem of clearing clutter from a workspace with limited ingress/egress access for multiple robots. We call the problem multi-robot clutter removal (MRCR). Targeting practical applications where motion planning is non-trivial but is not a bottleneck, we focus on finding high-quality solutions for feasible MRCR instances, which depends on the ability to efficiently compute high-quality object removal sequences. Despite the challenging multi-robot setting, our proposed search algorithms based on A*, dynamic programming, and best-first heuristics all produce solutions for tens of objects that significantly outperform single robot solutions. Realistic simulations with multiple Kuka youBots further confirms the effectiveness of our algorithmic solutions. In contrast, we also show that deciding the optimal object removal sequence for MRCR is computationally intractable.
Toward Fast and Optimal Robotic Pick-and-Place on a Moving Conveyor
Dec 17, 2019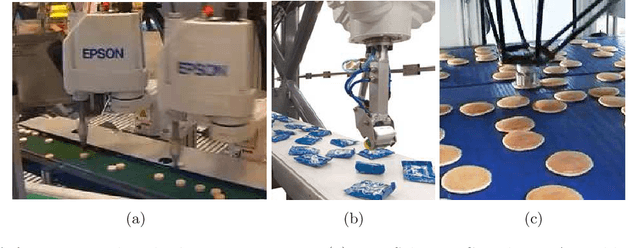
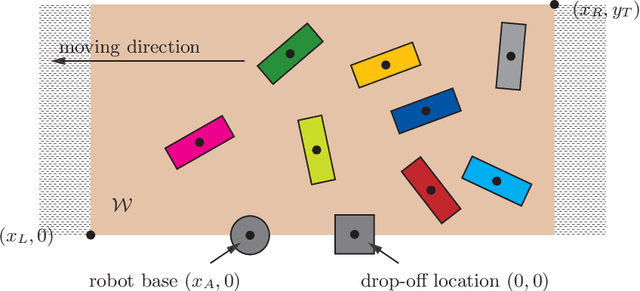
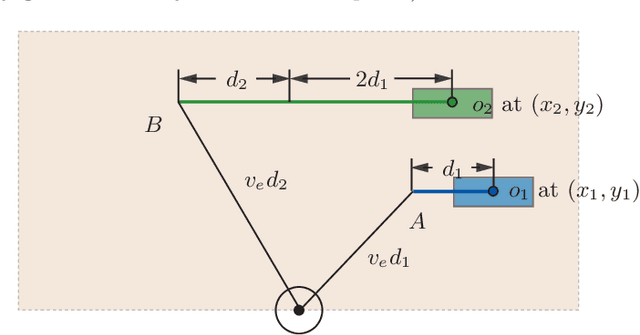
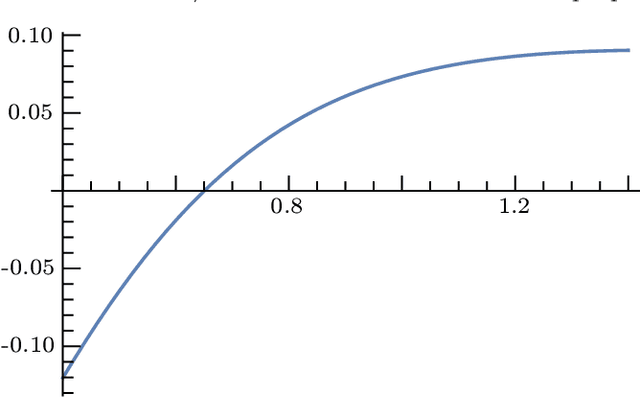
Robotic pick-and-place (PnP) operations on moving conveyors find a wide range of industrial applications. In practice, simple greedy heuristics (e.g., prioritization based on the time to process a single object) are applied that achieve reasonable efficiency. We show analytically that, under a simplified telescoping robot model, these greedy approaches do not ensure time optimality of PnP operations. To address the shortcomings of classical solutions, we develop algorithms that compute optimal object picking sequences for a predetermined finite horizon. Employing dynamic programming techniques and additional heuristics, our methods scale to up to tens to hundreds of objects. In particular, the fast algorithms we develop come with running time guarantees, making them suitable for real-time PnP applications demanding high throughput. Extensive evaluation of our algorithmic solution over dominant industrial PnP robots used in real-world applications, i.e., Delta robots and Selective Compliance Assembly Robot Arm (SCARA) robots, shows that a typical efficiency gain of around 10-40% over greedy approaches can be realized.
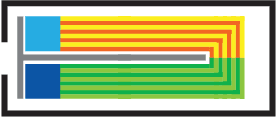
Efficient Algorithms for Optimal Perimeter Guarding
May 11, 2019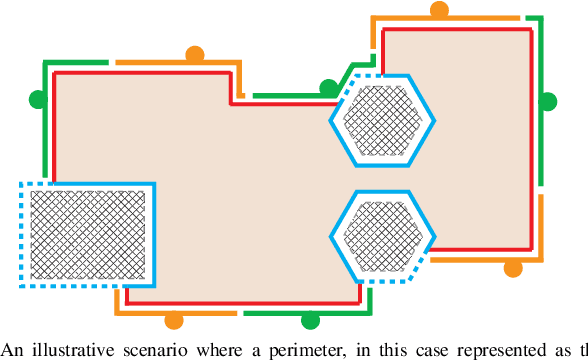
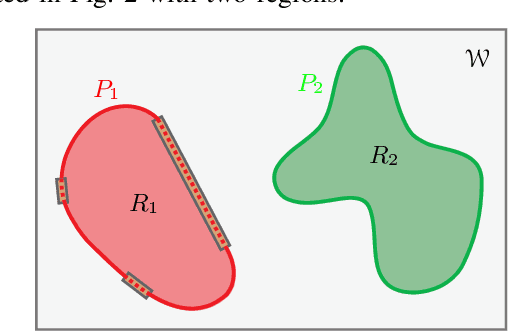
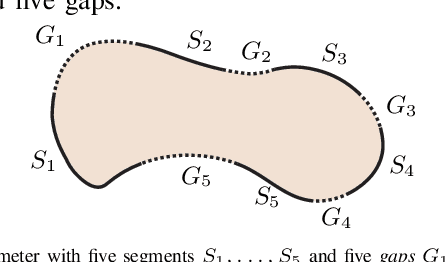
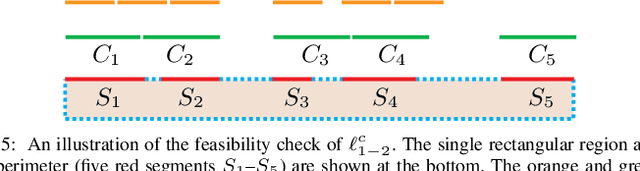
We investigate the problem of optimally assigning a large number of robots (or other types of autonomous agents) to guard the perimeters of closed 2D regions, where the perimeter of each region to be guarded may contain multiple disjoint polygonal chains. Each robot is responsible for guarding a subset of a perimeter and any point on a perimeter must be guarded by some robot. In allocating the robots, the main objective is to minimize the maximum 1D distance to be covered by any robot along the boundary of the regions. For this optimization problem which we call optimal perimeter guarding (OPG), thorough structural analysis is performed, which is then exploited to develop fast exact algorithms that run in guaranteed low polynomial time. In addition to formal analysis and proofs, experimental evaluations and simulations are performed that further validate the correctness and effectiveness of our algorithmic results.
DDM*: Fast Near-Optimal Multi-Robot Path Planning using Diversified-Path and Optimal Sub-Problem Solution Database Heuristics
Apr 04, 2019



We propose a novel centralized and decoupled algorithm, DDM*, for solving one-shot and dynamic optimal multi-robot path planning problems in a graph-based setting. Among other techniques, DDM* is mainly enabled through exploiting two innovative heuristics: path diversification and optimal sub-problem solution databases. The two heuristics attack two distinct phases of a decoupling-based planner: while path diversification allows more effective use of the entire workspace for robot travel, optimal sub-problem solution databases facilitate the fast resolution of local path conflicts. Extensive evaluation demonstrates that DDM* achieves both great scalability and a high level of solution optimality.
Integer Programming as a General Solution Methodology for Path-Based Optimization in Robotics: Principles, Best Practices, and Applications
Mar 01, 2019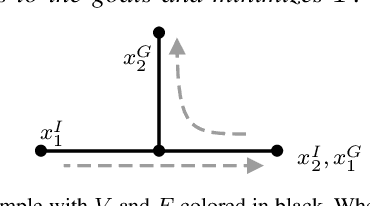
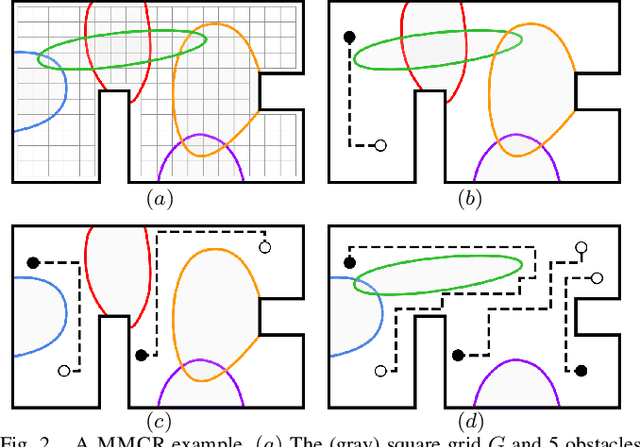
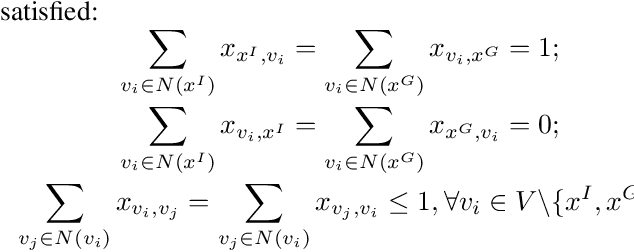
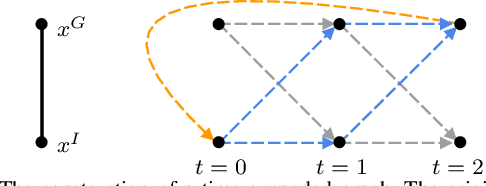
Integer programming (IP) has proven to be highly effective in solving many path-based optimization problems in robotics. However, the applications of IP are generally done in an ad-hoc, problem specific manner. In this work, after examined a wide range of path-based optimization problems, we describe an IP solution methodology for these problems that is both easy to apply (in two simple steps) and high-performance in terms of the computation time and the achieved optimality. We demonstrate the generality of our approach through the application to three challenging path-based optimization problems: multi-robot path planning (MPP), minimum constraint removal (MCR), and reward collection problems RCPs). Associated experiments show that the approach can efficiently produce (near-)optimal solutions for problems with large state spaces, complex constraints, and complicated objective functions. In conjunction with the proposition of the IP methodology, we introduce two new and practical robotics problems: multi-robot minimum constraint removal (MMCR) and multi-robot path planning (MPP) with partial solutions, which can be quickly and effectively solved using our proposed IP solution pipeline.
Coordinating the Motion of Labeled Discs with Optimality Guarantees under Extreme Density
Jul 09, 2018
We push the limit in planning collision-free motions for routing uniform labeled discs in two dimensions. First, from a theoretical perspective, we show that the constant-factor time-optimal routing of labeled discs can be achieved using a polynomial-time algorithm with robot density over $50\%$ in the limit (i.e., over half of the workspace may be occupied by the discs). Second, from a more practical standpoint, we provide a high performance algorithm that computes near-optimal (e.g., $1.x$) solutions under the same density setting.