 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman2Humanoid: Physics-Aware Cross-Morphology Motion Retargeting for Humanoid Robots
Jun 02, 2026Retargeting human motion to humanoid robots is critical for teleoperation, imitation learning and human-robot interaction. However, it remains challenging because of substantial morphological discrepancies between humans and robots, including differences in skeletal topology, limb proportions and degrees of freedom, as well as the scarcity of paired motion data. This paper presents Human2Humanoid, an unsupervised motion retargeting framework that transfers human motions to humanoid robot behaviors with high fidelity. To bridge the domain gap under unpaired data, we adopt a CycleGAN-based architecture equipped with a skeleton-aware graph convolutional network to capture topology-dependent motion features. To address cross-domain scale mismatches, we introduce a morphology-invariant end-effector consistency loss that aligns normalized end-effector trajectories to preserve motion semantics across embodiments. To improve physical plausibility and reduce contact artifacts, we impose explicit physics-aware feasibility constraints to encourage reproduction of the contact patterns in the source motion. Experimental results show that the proposed method successfully retargets human motion to the Unitree G1 humanoid robot without paired data, and outperforms existing methods in both downstream controllability and physical feasibility.
Bionic Human-Motion Style Transfer for Physically Executable Whole-Body Control of Humanoid Robots
Jun 02, 2026Expressive whole-body motion is important for humanoid robots operating in human environments, where robots are expected to move stably while presenting readable and adjustable body behaviors. However, most expressive motions are still obtained from fixed demonstrations or manually designed scripts, making it difficult to reuse a demonstrated style across different motion contents. Inspired by the way human motion styles convey affective and intentional cues through gait rhythm, posture, arm swing and body sway, this paper proposes a bionic generation-to-control framework for exemplar-driven style transfer on humanoid robots. Given a short human style exemplar and a target content motion, the proposed framework generates a stylized whole-body reference that preserves the intended motion content while transferring the demonstrated style. A physics-aware multi-condition latent diffusion model is developed to fuse style, content and trajectory conditions, and classifier-free guidance is used to adjust the style intensity without retraining. To improve hardware executability, contact-consistency and temporal-smoothness regularization are imposed on decoded motions during training. The generated references are then converted into G1-compatible robot references and executed by a preview-based whole-body tracking policy trained with a cluster-and-distill strategy. Simulation and Unitree G1 experiments show that the proposed method can transfer short human style exemplars to diverse robot motion contents, reduce contact and jitter artifacts compared with animation-oriented style-transfer baselines, and achieve a 96.0% success rate over 125 reported real-robot trials. The results demonstrate the feasibility of using short human motion exemplars as reusable bionic sources for physically executable expressive humanoid motion.
ADAPT: Adaptive Dual-projection Architecture for Perceptive Traversal
Mar 17, 2026Agile humanoid locomotion in complex 3D en- vironments requires balancing perceptual fidelity with com- putational efficiency, yet existing methods typically rely on rigid sensing configurations. We propose ADAPT (Adaptive dual-projection architecture for perceptive traversal), which represents the environment using a horizontal elevation map for terrain geometry and a vertical distance map for traversable- space constraints. ADAPT further treats its spatial sensing range as a learnable action, enabling the policy to expand its perceptual horizon during fast motion and contract it in cluttered scenes for finer local resolution. Compared with voxel-based baselines, ADAPT drastically reduces observation dimensionality and computational overhead while substantially accelerating training. Experimentally, it achieves successful zero-shot transfer to a Unitree G1 Humanoid and signifi- cantly outperforms fixed-range baselines, yielding highly robust traversal across diverse 3D environtmental challenges.
SKATER: Synthesized Kinematics for Advanced Traversing Efficiency on a Humanoid Robot via Roller Skate Swizzles
Jan 08, 2026Although recent years have seen significant progress of humanoid robots in walking and running, the frequent foot strikes with ground during these locomotion gaits inevitably generate high instantaneous impact forces, which leads to exacerbated joint wear and poor energy utilization. Roller skating, as a sport with substantial biomechanical value, can achieve fast and continuous sliding through rational utilization of body inertia, featuring minimal kinetic energy loss. Therefore, this study proposes a novel humanoid robot with each foot equipped with a row of four passive wheels for roller skating. A deep reinforcement learning control framework is also developed for the swizzle gait with the reward function design based on the intrinsic characteristics of roller skating. The learned policy is first analyzed in simulation and then deployed on the physical robot to demonstrate the smoothness and efficiency of the swizzle gait over traditional bipedal walking gait in terms of Impact Intensity and Cost of Transport during locomotion. A reduction of $75.86\%$ and $63.34\%$ of these two metrics indicate roller skating as a superior locomotion mode for enhanced energy efficiency and joint longevity.
Traversing the Narrow Path: A Two-Stage Reinforcement Learning Framework for Humanoid Beam Walking
Aug 29, 2025Traversing narrow beams is challenging for humanoids due to sparse, safety-critical contacts and the fragility of purely learned policies. We propose a physically grounded, two-stage framework that couples an XCoM/LIPM footstep template with a lightweight residual planner and a simple low-level tracker. Stage-1 is trained on flat ground: the tracker learns to robustly follow footstep targets by adding small random perturbations to heuristic footsteps, without any hand-crafted centerline locking, so it acquires stable contact scheduling and strong target-tracking robustness. Stage-2 is trained in simulation on a beam: a high-level planner predicts a body-frame residual (Delta x, Delta y, Delta psi) for the swing foot only, refining the template step to prioritize safe, precise placement under narrow support while preserving interpretability. To ease deployment, sensing is kept minimal and consistent between simulation and hardware: the planner consumes compact, forward-facing elevation cues together with onboard IMU and joint signals. On a Unitree G1, our system reliably traverses a 0.2 m-wide, 3 m-long beam. Across simulation and real-world studies, residual refinement consistently outperforms template-only and monolithic baselines in success rate, centerline adherence, and safety margins, while the structured footstep interface enables transparent analysis and low-friction sim-to-real transfer.
High-Precision Transformer-Based Visual Servoing for Humanoid Robots in Aligning Tiny Objects
Mar 06, 2025



High-precision tiny object alignment remains a common and critical challenge for humanoid robots in real-world. To address this problem, this paper proposes a vision-based framework for precisely estimating and controlling the relative position between a handheld tool and a target object for humanoid robots, e.g., a screwdriver tip and a screw head slot. By fusing images from the head and torso cameras on a robot with its head joint angles, the proposed Transformer-based visual servoing method can correct the handheld tool's positional errors effectively, especially at a close distance. Experiments on M4-M8 screws demonstrate an average convergence error of 0.8-1.3 mm and a success rate of 93\%-100\%. Through comparative analysis, the results validate that this capability of high-precision tiny object alignment is enabled by the Distance Estimation Transformer architecture and the Multi-Perception-Head mechanism proposed in this paper.
A Real-time Non-contact Localization Method for Faulty Electric Energy Storage Components using Highly Sensitive Magnetometers
Aug 15, 2023



With the wide application of electric energy storage component arrays, such as battery arrays, capacitor arrays, inductor arrays, their potential safety risks have gradually drawn the public attention. However, existing technologies cannot meet the needs of non-contact and real-time diagnosis for faulty components inside these massive arrays. To solve this problem, this paper proposes a new method based on the beamforming spatial filtering algorithm to precisely locate the faulty components within the arrays in real-time. The method uses highly sensitive magnetometers to collect the magnetic signals from energy storage component arrays, without damaging or even contacting any component. The experimental results demonstrate the potential of the proposed method in securing energy storage component arrays. Within an imaging area of 80 mm $\times$ 80 mm, the one faulty component out of nine total components can be localized with an accuracy of 0.72 mm for capacitor arrays and 1.60 mm for battery arrays.
Active View Planning for Visual SLAM in Outdoor Environments Based on Continuous Information Modeling
Nov 12, 2022



The visual simultaneous localization and mapping(vSLAM) is widely used in GPS-denied and open field environments for ground and surface robots. However, due to the frequent perception failures derived from lacking visual texture or the {swing} of robot view direction on rough terrains, the accuracy and robustness of vSLAM are still to be enhanced. The study develops a novel view planning approach of actively perceiving areas with maximal information to address the mentioned problem; a gimbal camera is used as the main sensor. Firstly, a map representation based on feature distribution-weighted Fisher information is proposed to completely and effectively represent environmental information richness. With the map representation, a continuous environmental information model is further established to convert the discrete information space into a continuous one for numerical optimization in real-time. Subsequently, the receding horizon optimization is utilized to obtain the optimal informative viewpoints with simultaneously considering the robotic perception, exploration and motion cost based on the continuous environmental model. Finally, several simulations and outdoor experiments are performed to verify the improvement of localization robustness and accuracy by the proposed approach.
Edge-based Monocular Thermal-Inertial Odometry in Visually Degraded Environments
Oct 18, 2022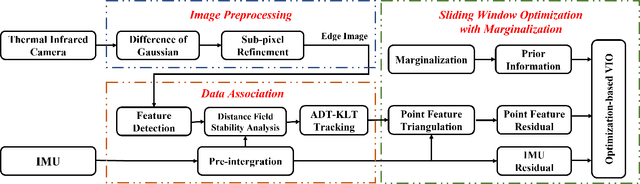
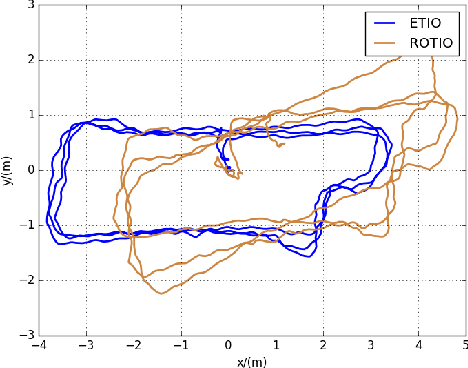
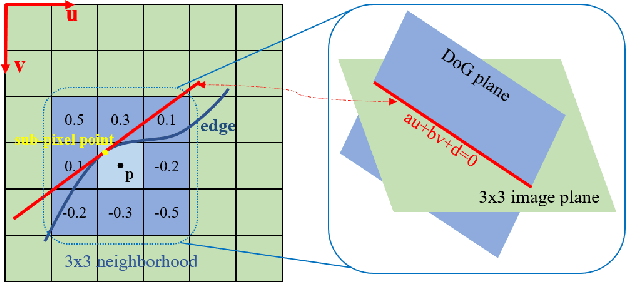
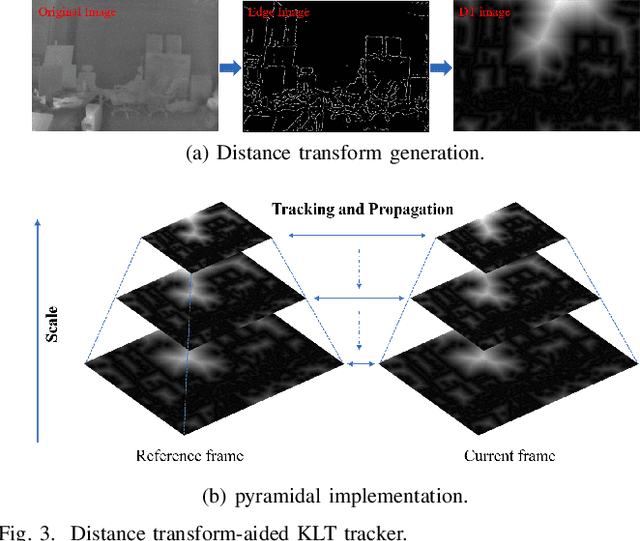
State estimation in complex illumination environments based on conventional visual-inertial odometry is a challenging task due to the severe visual degradation of the visual camera. The thermal infrared camera is capable of all-day time and is less affected by illumination variation. However, most existing visual data association algorithms are incompatible because the thermal infrared data contains large noise and low contrast. Motivated by the phenomenon that thermal radiation varies most significantly at the edges of objects, the study proposes an ETIO, which is the first edge-based monocular thermal-inertial odometry for robust localization in visually degraded environments. Instead of the raw image, we utilize the binarized image from edge extraction for pose estimation to overcome the poor thermal infrared image quality. Then, an adaptive feature tracking strategy ADT-KLT is developed for robust data association based on limited edge information and its distance distribution. Finally, a pose graph optimization performs real-time estimation over a sliding window of recent states by combining IMU pre-integration with reprojection error of all edge feature observations. We evaluated the performance of the proposed system on public datasets and real-world experiments and compared it against state-of-the-art methods. The proposed ETIO was verified with the ability to enable accurate and robust localization all-day time.