 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Recognition and Force Estimation with the GelSight Baby Fin Ray
Sep 18, 2025Recent advances in soft robotic hands and tactile sensing have enabled both to perform an increasing number of complex tasks with the aid of machine learning. In particular, we presented the GelSight Baby Fin Ray in our previous work, which integrates a camera with a soft, compliant Fin Ray structure. Camera-based tactile sensing gives the GelSight Baby Fin Ray the ability to capture rich contact information like forces, object geometries, and textures. Moreover, our previous work showed that the GelSight Baby Fin Ray can dig through clutter, and classify in-shell nuts. To further examine the potential of the GelSight Baby Fin Ray, we leverage learning to distinguish nut-in-shell textures and to perform force and position estimation. We implement ablation studies with popular neural network structures, including ResNet50, GoogLeNet, and 3- and 5-layer convolutional neural network (CNN) structures. We conclude that machine learning is a promising technique to extract useful information from high-resolution tactile images and empower soft robotics to better understand and interact with the environments.
A Passively Bendable, Compliant Tactile Palm with RObotic Modular Endoskeleton Optical (ROMEO) Fingers
Apr 12, 2024



Many robotic hands currently rely on extremely dexterous robotic fingers and a thumb joint to envelop themselves around an object. Few hands focus on the palm even though human hands greatly benefit from their central fold and soft surface. As such, we develop a novel structurally compliant soft palm, which enables more surface area contact for the objects that are pressed into it. Moreover, this design, along with the development of a new low-cost, flexible illumination system, is able to incorporate a high-resolution tactile sensing system inspired by the GelSight sensors. Concurrently, we design RObotic Modular Endoskeleton Optical (ROMEO) fingers, which are underactuated two-segment soft fingers that are able to house the new illumination system, and we integrate them into these various palm configurations. The resulting robotic hand is slightly bigger than a baseball and represents one of the first soft robotic hands with actuated fingers and a passively compliant palm, all of which have high-resolution tactile sensing. This design also potentially helps researchers discover and explore more soft-rigid tactile robotic hand designs with greater capabilities in the future. The supplementary video can be found here: https://youtu.be/RKfIFiewqsg
Scalable, Simulation-Guided Compliant Tactile Finger Design
Mar 07, 2024



Compliant grippers enable robots to work with humans in unstructured environments. In general, these grippers can improve with tactile sensing to estimate the state of objects around them to precisely manipulate objects. However, co-designing compliant structures with high-resolution tactile sensing is a challenging task. We propose a simulation framework for the end-to-end forward design of GelSight Fin Ray sensors. Our simulation framework consists of mechanical simulation using the finite element method (FEM) and optical simulation including physically based rendering (PBR). To simulate the fluorescent paint used in these GelSight Fin Rays, we propose an efficient method that can be directly integrated in PBR. Using the simulation framework, we investigate design choices available in the compliant grippers, namely gel pad shapes, illumination conditions, Fin Ray gripper sizes, and Fin Ray stiffness. This infrastructure enables faster design and prototype time frames of new Fin Ray sensors that have various sensing areas, ranging from 48 mm $\times$ \18 mm to 70 mm $\times$ 35 mm. Given the parameters we choose, we can thus optimize different Fin Ray designs and show their utility in grasping day-to-day objects.
GelSight EndoFlex: A Soft Endoskeleton Hand with Continuous High-Resolution Tactile Sensing
Mar 31, 2023



We describe a novel three-finger robot hand that has high resolution tactile sensing along the entire length of each finger. The fingers are compliant, constructed with a soft shell supported with a flexible endoskeleton. Each finger contains two cameras, allowing tactile data to be gathered along the front and side surfaces of the fingers. The gripper can perform an enveloping grasp of an object and extract a large amount of rich tactile data in a single grasp. By capturing data from many parts of the grasped object at once, we can do object recognition with a single grasp rather than requiring multiple touches. We describe our novel design and construction techniques which allow us to simultaneously satisfy the requirements of compliance and strength, and high resolution tactile sensing over large areas. The supplementary video can be found here: https://youtu.be/H1OYADtgj9k
GelSight Baby Fin Ray: A Compact, Compliant, Flexible Finger with High-Resolution Tactile Sensing
Mar 27, 2023



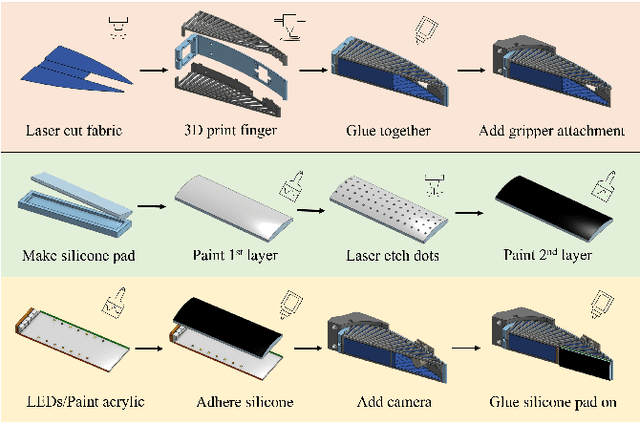
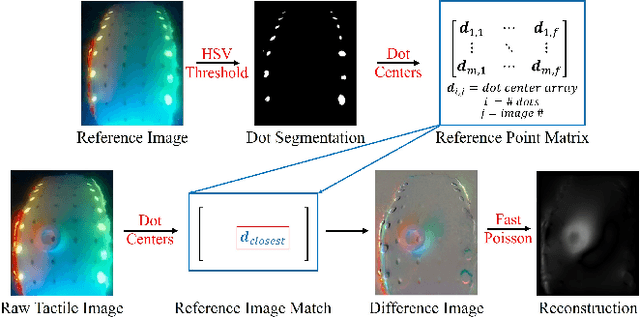
The synthesis of tactile sensing with compliance is essential to many fields, from agricultural usages like fruit picking, to sustainability practices such as sorting recycling, to the creation of safe home-care robots for the elderly to age with dignity. From tactile sensing, we can discern material properties, recognize textures, and determine softness, while with compliance, we are able to securely and safely interact with the objects and the environment around us. These two abilities can culminate into a useful soft robotic gripper, such as the original GelSight Fin Ray, which is able to grasp a large variety of different objects and also perform a simple household manipulation task: wine glass reorientation. Although the original GelSight Fin Ray solves the problem of interfacing a generally rigid, high-resolution sensor with a soft, compliant structure, we can improve the robustness of the sensor and implement techniques that make such camera-based tactile sensors applicable to a wider variety of soft robot designs. We first integrate flexible mirrors and incorporate the rigid electronic components into the base of the gripper, which greatly improves the compliance of the Fin Ray structure. Then, we synthesize a flexible and high-elongation silicone adhesive-based fluorescent paint, which can provide good quality 2D tactile localization results for our sensor. Finally, we incorporate all of these techniques into a new design: the Baby Fin Ray, which we use to dig through clutter, and perform successful classification of nuts in their shells. The supplementary video can be found here: https://youtu.be/_oD_QFtYTPM
GelSight Fin Ray: Incorporating Tactile Sensing into a Soft Compliant Robotic Gripper
Apr 14, 2022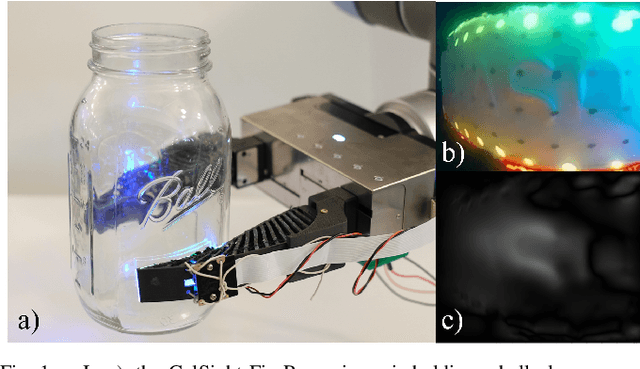

To adapt to constantly changing environments and be safe for human interaction, robots should have compliant and soft characteristics as well as the ability to sense the world around them. Even so, the incorporation of tactile sensing into a soft compliant robot, like the Fin Ray finger, is difficult due to its deformable structure. Not only does the frame need to be modified to allow room for a vision sensor, which enables intricate tactile sensing, the robot must also retain its original mechanically compliant properties. However, adding high-resolution tactile sensors to soft fingers is difficult since many sensorized fingers, such as GelSight-based ones, are rigid and function under the assumption that changes in the sensing region are only from tactile contact and not from finger compliance. A sensorized soft robotic finger needs to be able to separate its overall proprioceptive changes from its tactile information. To this end, this paper introduces the novel design of a GelSight Fin Ray, which embodies both the ability to passively adapt to any object it grasps and the ability to perform high-resolution tactile reconstruction, object orientation estimation, and marker tracking for shear and torsional forces. Having these capabilities allow soft and compliant robots to perform more manipulation tasks that require sensing. One such task the finger is able to perform successfully is a kitchen task: wine glass reorientation and placement, which is difficult to do with external vision sensors but is easy with tactile sensing. The development of this sensing technology could also potentially be applied to other soft compliant grippers, increasing their viability in many different fields.
Exoskeleton-covered soft finger with vision-based proprioception and exteroception
Oct 03, 2019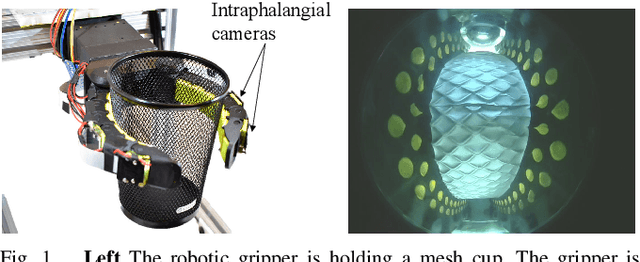
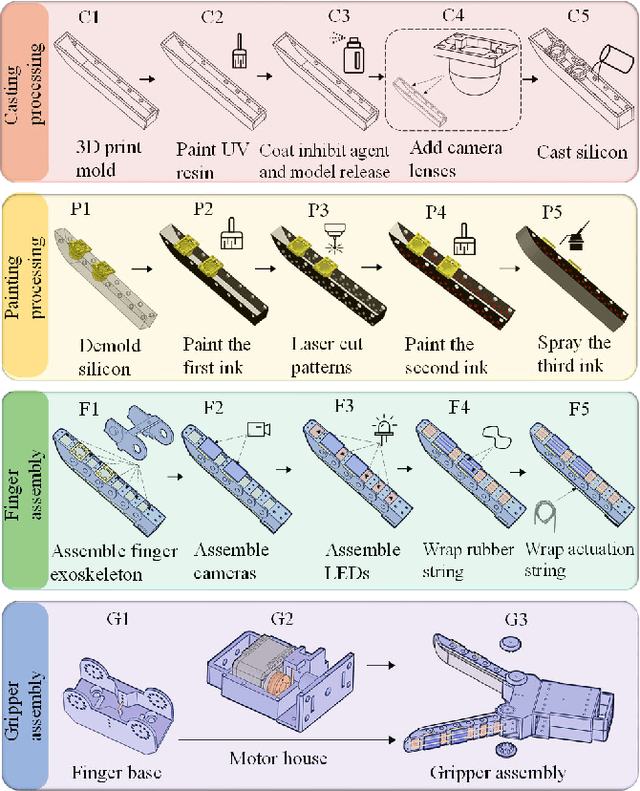
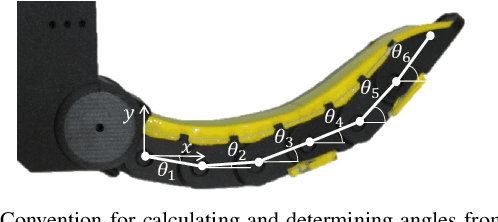
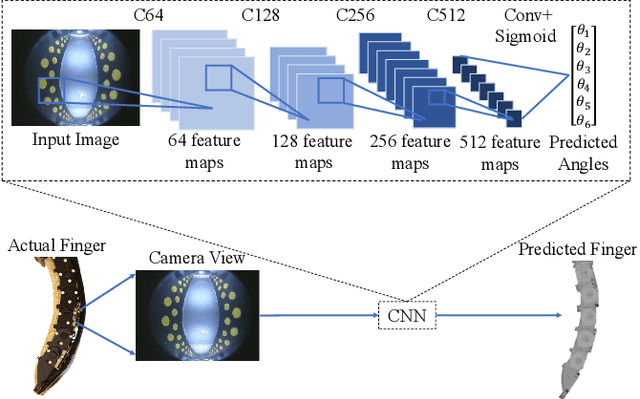
Soft robots offer significant advantages in adaptability, safety, and dexterity compared to conventional rigid-body robots. However, it is challenging to equip soft robots with accurate proprioception and exteroception due to their high flexibility and elasticity. In this work, we develop a novel exoskeleton-covered soft finger with embedded cameras and deep learning methods that enable high-resolution proprioceptive sensing and rich tactile sensing. To do so, we design features along the axial direction of the finger, which enable high-resolution proprioceptive sensing, and incorporate a reflective ink coating on the surface of the finger to enable rich tactile sensing. We design a highly underactuated exoskeleton with a tendon-driven mechanism to actuate the finger. Finally, we assemble 2 of the fingers together to form a robotic gripper and successfully perform a bar stock classification task, which requires both shape and tactile information. We train neural networks for proprioception and shape (box versus cylinder) classification using data from the embedded sensors. The proprioception CNN had over 99\% accuracy on our testing set (all six joint angles were within 1$^\circ$ of error) and had an average accumulative distance error of 0.77 mm during live testing, which is better than human finger proprioception. These proposed techniques offer soft robots the high-level ability to simultaneously perceive their proprioceptive state and peripheral environment, providing potential solutions for soft robots to solve everyday manipulation tasks. We believe the methods developed in this work can be widely applied to different designs and applications.