 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorresponding Supine and Prone Colon Visualization Using Eigenfunction Analysis and Fold Modeling
Oct 20, 2018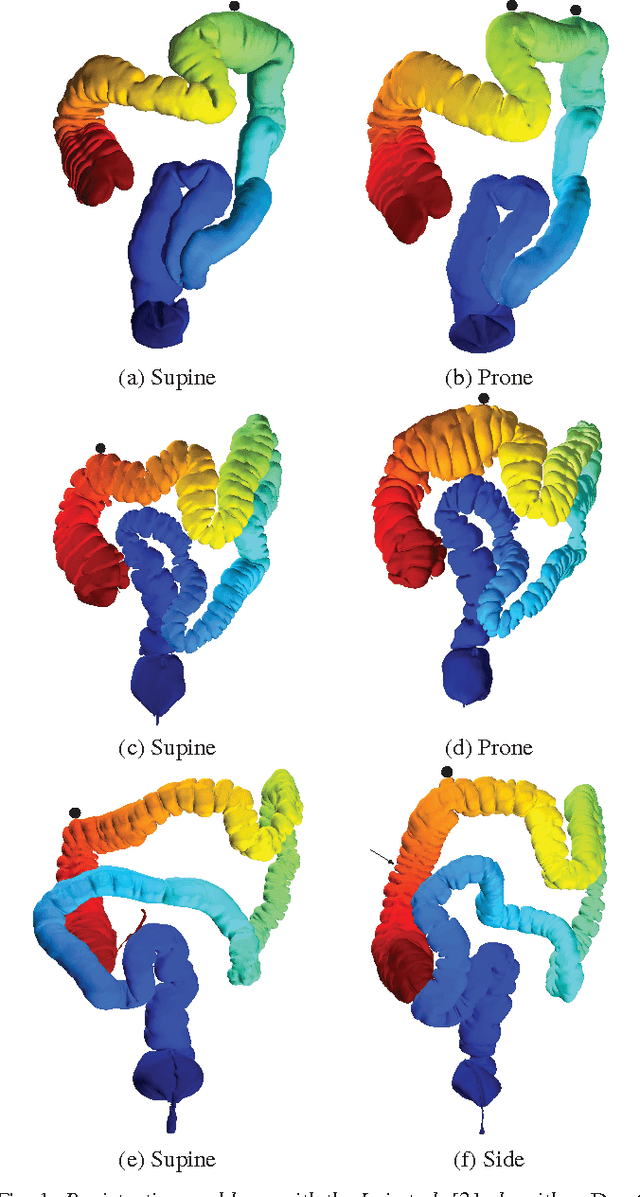
We present a method for registration and visualization of corresponding supine and prone virtual colonoscopy scans based on eigenfunction analysis and fold modeling. In virtual colonoscopy, CT scans are acquired with the patient in two positions, and their registration is desirable so that physicians can corroborate findings between scans. Our algorithm performs this registration efficiently through the use of Fiedler vector representation (the second eigenfunction of the Laplace-Beltrami operator). This representation is employed to first perform global registration of the two colon positions. The registration is then locally refined using the haustral folds, which are automatically segmented using the 3D level sets of the Fiedler vector. The use of Fiedler vectors and the segmented folds presents a precise way of visualizing corresponding regions across datasets and visual modalities. We present multiple methods of visualizing the results, including 2D flattened rendering and the corresponding 3D endoluminal views. The precise fold modeling is used to automatically find a suitable cut for the 2D flattening, which provides a less distorted visualization. Our approach is robust, and we demonstrate its efficiency and efficacy by showing matched views on both the 2D flattened colons and in the 3D endoluminal view. We analytically evaluate the results by measuring the distance between features on the registered colons, and we also assess our fold segmentation against 20 manually labeled datasets. We have compared our results analytically to previous methods, and have found our method to achieve superior results. We also prove the hot spots conjecture for modeling cylindrical topology using Fiedler vector representation, which allows our approach to be used for general cylindrical geometry modeling and feature extraction.
* IEEE Transactions on Visualization and Computer Graphics, 23(1):751-760, 2017 (11 pages, 13 figures)
FeatureLego: Volume Exploration Using Exhaustive Clustering of Super-Voxels
Oct 11, 2018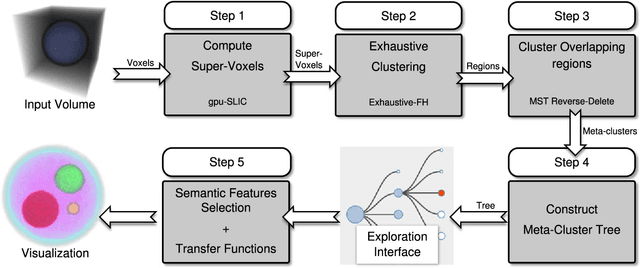
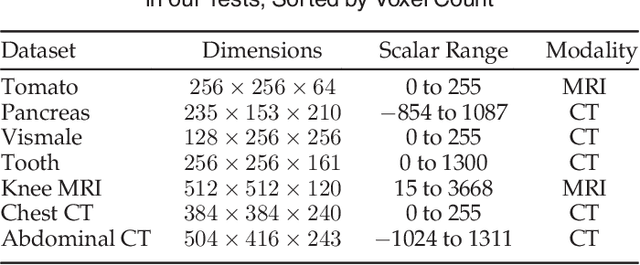
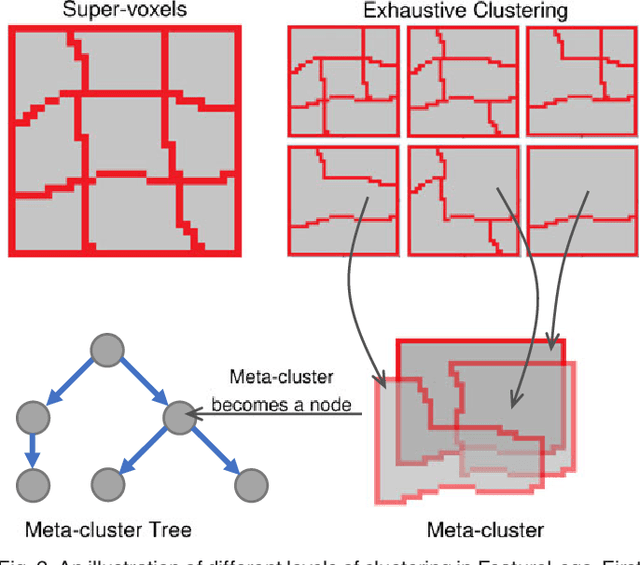
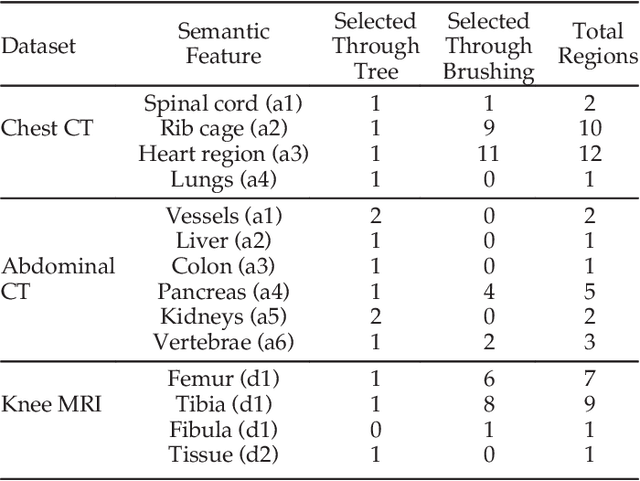
We present a volume exploration framework, FeatureLego, that uses a novel voxel clustering approach for efficient selection of semantic features. We partition the input volume into a set of compact super-voxels that represent the finest selection granularity. We then perform an exhaustive clustering of these super-voxels using a graph-based clustering method. Unlike the prevalent brute-force parameter sampling approaches, we propose an efficient algorithm to perform this exhaustive clustering. By computing an exhaustive set of clusters, we aim to capture as many boundaries as possible and ensure that the user has sufficient options for efficiently selecting semantically relevant features. Furthermore, we merge all the computed clusters into a single tree of meta-clusters that can be used for hierarchical exploration. We implement an intuitive user-interface to interactively explore volumes using our clustering approach. Finally, we show the effectiveness of our framework on multiple real-world datasets of different modalities.
Radiative Transport Based Flame Volume Reconstruction from Videos
Sep 17, 2018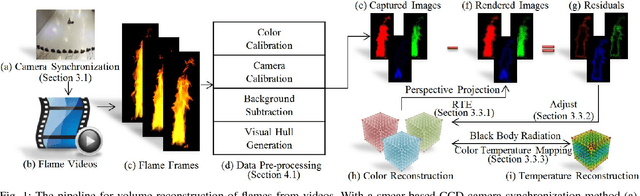
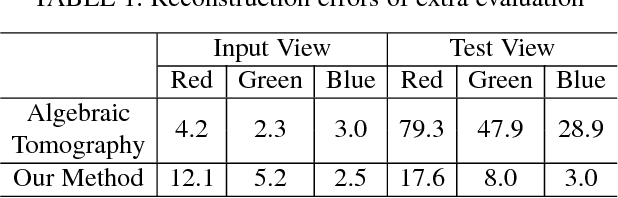
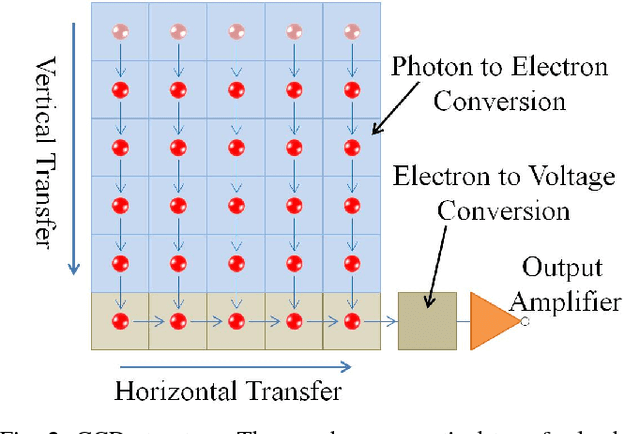
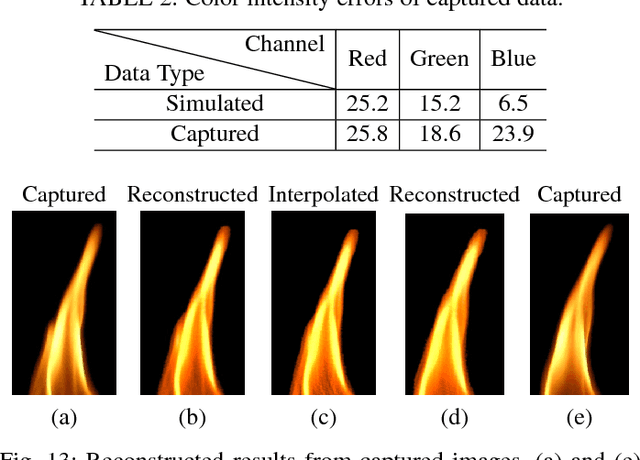
We introduce a novel approach for flame volume reconstruction from videos using inexpensive charge-coupled device (CCD) consumer cameras. The approach includes an economical data capture technique using inexpensive CCD cameras. Leveraging the smear feature of the CCD chip, we present a technique for synchronizing CCD cameras while capturing flame videos from different views. Our reconstruction is based on the radiative transport equation which enables complex phenomena such as emission, extinction, and scattering to be used in the rendering process. Both the color intensity and temperature reconstructions are implemented using the CUDA parallel computing framework, which provides real-time performance and allows visualization of reconstruction results after every iteration. We present the results of our approach using real captured data and physically-based simulated data. Finally, we also compare our approach against the other state-of-the-art flame volume reconstruction methods and demonstrate the efficacy and efficiency of our approach in four different applications: (1) rendering of reconstructed flames in virtual environments, (2) rendering of reconstructed flames in augmented reality, (3) flame stylization, and (4) reconstruction of other semitransparent phenomena.
Crowd-Assisted Polyp Annotation of Virtual Colonoscopy Videos
Sep 17, 2018Virtual colonoscopy (VC) allows a radiologist to navigate through a 3D colon model reconstructed from a computed tomography scan of the abdomen, looking for polyps, the precursors of colon cancer. Polyps are seen as protrusions on the colon wall and haustral folds, visible in the VC fly-through videos. A complete review of the colon surface requires full navigation from the rectum to the cecum in antegrade and retrograde directions, which is a tedious task that takes an average of 30 minutes. Crowdsourcing is a technique for non-expert users to perform certain tasks, such as image or video annotation. In this work, we use crowdsourcing for the examination of complete VC fly-through videos for polyp annotation by non-experts. The motivation for this is to potentially help the radiologist reach a diagnosis in a shorter period of time, and provide a stronger confirmation of the eventual diagnosis. The crowdsourcing interface includes an interactive tool for the crowd to annotate suspected polyps in the video with an enclosing box. Using our workflow, we achieve an overall polyps-per-patient sensitivity of 87.88% (95.65% for polyps $\geq$5mm and 70% for polyps $<$5mm). We also demonstrate the efficacy and effectiveness of a non-expert user in detecting and annotating polyps and discuss their possibility in aiding radiologists in VC examinations.
Crowdsourcing Lung Nodules Detection and Annotation
Sep 17, 2018We present crowdsourcing as an additional modality to aid radiologists in the diagnosis of lung cancer from clinical chest computed tomography (CT) scans. More specifically, a complete workflow is introduced which can help maximize the sensitivity of lung nodule detection by utilizing the collective intelligence of the crowd. We combine the concept of overlapping thin-slab maximum intensity projections (TS-MIPs) and cine viewing to render short videos that can be outsourced as an annotation task to the crowd. These videos are generated by linearly interpolating overlapping TS-MIPs of CT slices through the depth of each quadrant of a patient's lung. The resultant videos are outsourced to an online community of non-expert users who, after a brief tutorial, annotate suspected nodules in these video segments. Using our crowdsourcing workflow, we achieved a lung nodule detection sensitivity of over 90% for 20 patient CT datasets (containing 178 lung nodules with sizes between 1-30mm), and only 47 false positives from a total of 1021 annotations on nodules of all sizes (96% sensitivity for nodules$>$4mm). These results show that crowdsourcing can be a robust and scalable modality to aid radiologists in screening for lung cancer, directly or in combination with computer-aided detection (CAD) algorithms. For CAD algorithms, the presented workflow can provide highly accurate training data to overcome the high false-positive rate (per scan) problem. We also provide, for the first time, analysis on nodule size and position which can help improve CAD algorithms.
Interpretable Spiculation Quantification for Lung Cancer Screening
Sep 01, 2018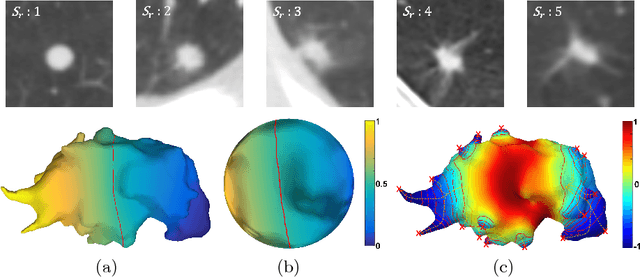
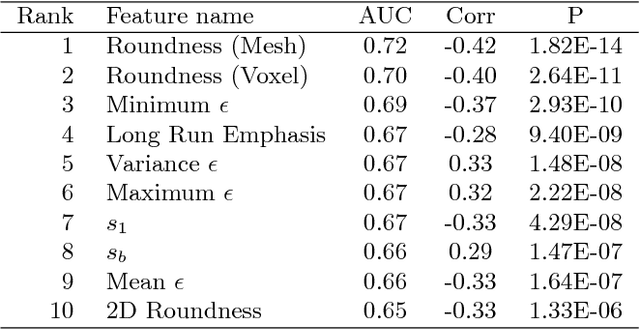
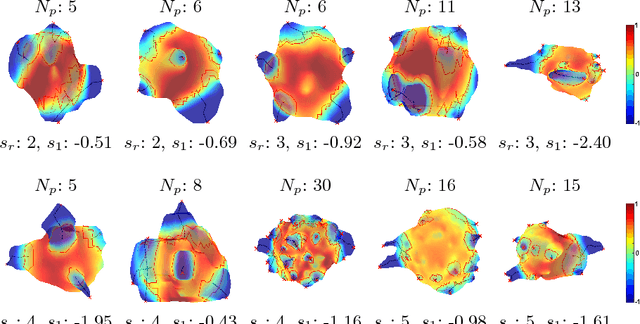

Spiculations are spikes on the surface of pulmonary nodule and are important predictors of malignancy in lung cancer. In this work, we introduced an interpretable, parameter-free technique for quantifying this critical feature using the area distortion metric from the spherical conformal (angle-preserving) parameterization. The conformal factor in the spherical mapping formulation provides a direct measure of spiculation which can be used to detect spikes and compute spike heights for geometrically-complex spiculations. The use of the area distortion metric from conformal mapping has never been exploited before in this context. Based on the area distortion metric and the spiculation height, we introduced a novel spiculation score. A combination of our spiculation measures was found to be highly correlated (Spearman's rank correlation coefficient $\rho = 0.48$) with the radiologist's spiculation score. These measures were also used in the radiomics framework to achieve state-of-the-art malignancy prediction accuracy of 88.9% on a publicly available dataset.
GlymphVIS: Visualizing Glymphatic Transport Pathways Using Regularized Optimal Transport
Sep 01, 2018
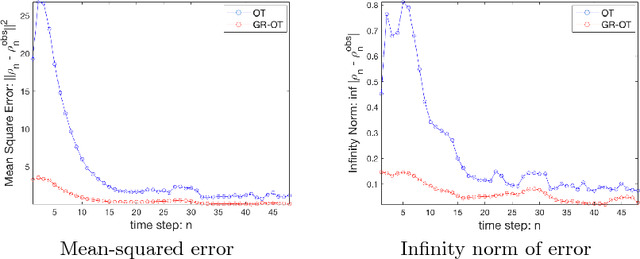

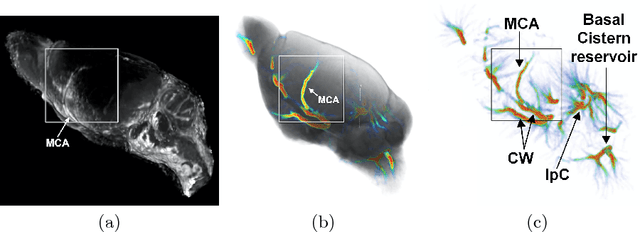
The glymphatic system (GS) is a transit passage that facilitates brain metabolic waste removal and its dysfunction has been associated with neurodegenerative diseases such as Alzheimer's disease. The GS has been studied by acquiring temporal contrast enhanced magnetic resonance imaging (MRI) sequences of a rodent brain, and tracking the cerebrospinal fluid injected contrast agent as it flows through the GS. We present here a novel visualization framework, GlymphVIS, which uses regularized optimal transport (OT) to study the flow behavior between time points at which the images are taken. Using this regularized OT approach, we can incorporate diffusion, handle noise, and accurately capture and visualize the time varying dynamics in GS transport. Moreover, we are able to reduce the registration mean-squared and infinity-norm error across time points by up to a factor of 5 as compared to the current state-of-the-art method. Our visualization pipeline yields flow patterns that align well with experts' current findings of the glymphatic system.
Quantification of Local Metabolic Tumor Volume Changes by Registering Blended PET-CT Images for Prediction of Pathologic Tumor Response
Aug 24, 2018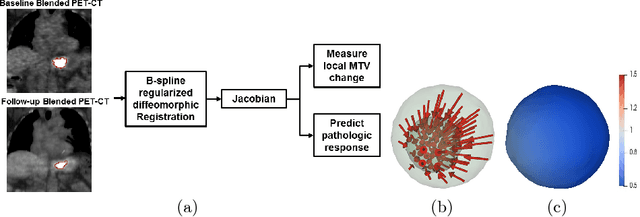
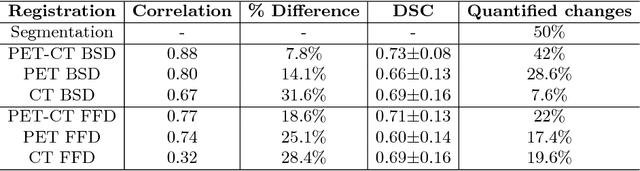
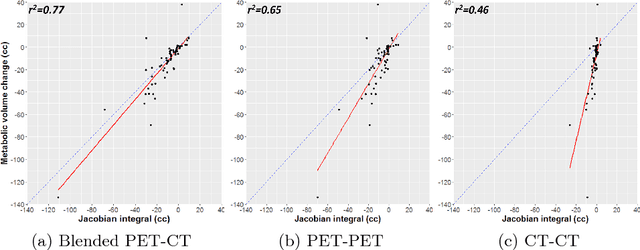
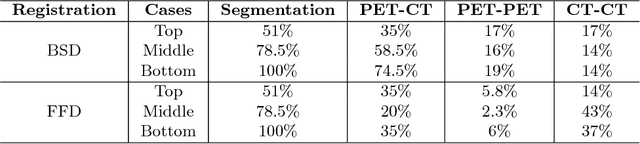
Quantification of local metabolic tumor volume (MTV) chan-ges after Chemo-radiotherapy would allow accurate tumor response evaluation. Currently, local MTV changes in esophageal (soft-tissue) cancer are measured by registering follow-up PET to baseline PET using the same transformation obtained by deformable registration of follow-up CT to baseline CT. Such approach is suboptimal because PET and CT capture fundamentally different properties (metabolic vs. anatomy) of a tumor. In this work we combined PET and CT images into a single blended PET-CT image and registered follow-up blended PET-CT image to baseline blended PET-CT image. B-spline regularized diffeomorphic registration was used to characterize the large MTV shrinkage. Jacobian of the resulting transformation was computed to measure the local MTV changes. Radiomic features (intensity and texture) were then extracted from the Jacobian map to predict pathologic tumor response. Local MTV changes calculated using blended PET-CT registration achieved the highest correlation with ground truth segmentation (R=0.88) compared to PET-PET (R=0.80) and CT-CT (R=0.67) registrations. Moreover, using blended PET-CT registration, the multivariate prediction model achieved the highest accuracy with only one Jacobian co-occurrence texture feature (accuracy=82.3%). This novel framework can replace the conventional approach that applies CT-CT transformation to the PET data for longitudinal evaluation of tumor response.
Depth Reconstruction and Computer-Aided Polyp Detection in Optical Colonoscopy Video Frames
Sep 10, 2016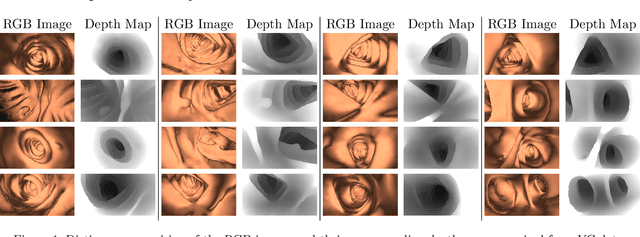
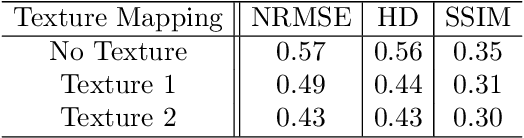
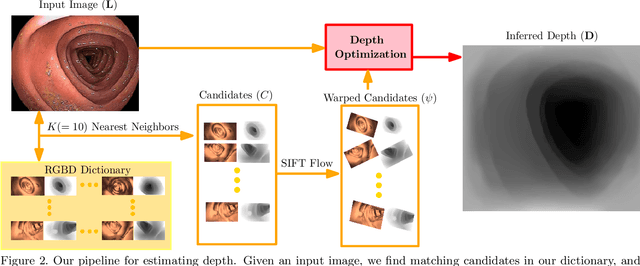
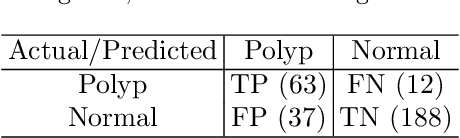
We present a computer-aided detection algorithm for polyps in optical colonoscopy images. Polyps are the precursors to colon cancer. In the US alone, more than 14 million optical colonoscopies are performed every year, mostly to screen for polyps. Optical colonoscopy has been shown to have an approximately 25% polyp miss rate due to the convoluted folds and bends present in the colon. In this work, we present an automatic detection algorithm to detect these polyps in the optical colonoscopy images. We use a machine learning algorithm to infer a depth map for a given optical colonoscopy image and then use a detailed pre-built polyp profile to detect and delineate the boundaries of polyps in this given image. We have achieved the best recall of 84.0% and the best specificity value of 83.4%.