 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexterity-BEV: Aligning 3D World and Actions for Generalizable Robot Policies Learning
Jun 01, 2026End-to-end manipulation policies, combined with web-scale pretrained Vision-Language Models (VLMs), show the promise for generalizable and dexterous robotic manipulation. However, they inherit two key limitations from 2D foundation models: 1) the reliance on 2D RGB inputs that ignores the intrinsically 3D nature of manipulation; and 2) the lack of spatial 3D alignment between input-output spaces as well as across diverse robot embodiments, camera setups, and trajectory datasets. In this paper, we present a series of contributions to address these issues. First, we introduce aligned vertex map and vertex spectrum -- a pixel-wise 3D representation that elevates 2D visual inputs to 3D, using camera calibration and optional depth. This novel input representation marries 3D awareness with the generalization of 2D large VLMs. Then, we propose to align the inputs and outputs of manipulation policies by expressing per-pixel 3D information of each camera view and robot actions to a shared coordinate. Based on this, we designate a canonical Bird's-Eye-View (BEV) alignment frame and innovatively propose to construct BEV images, producing a view-invariant representation robust to camera pose variations. To enable training and evaluation at scale, we develop a comprehensive data processing pipeline to perform such alignments; we also introduce a novel temporal alignment scheme for trajectories across diverse robots, human operators, and datasets. These contributions collectively mitigate input and output spatial-temporal misalignments, improving the consistency and generalization for real-world manipulation. Pretrained checkpoint, source code and data processing pipeline are available in https://hnuzhy.github.io/projects/Dex-BEV.
Evaluating Path Planning Strategies for Efficient Nitrate Sampling in Crop Rows
Mar 10, 2025
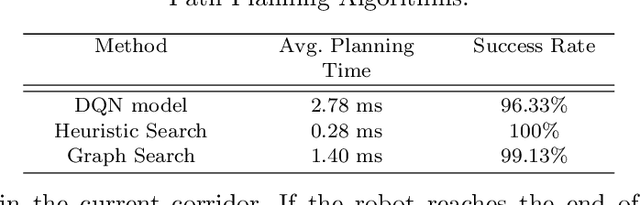
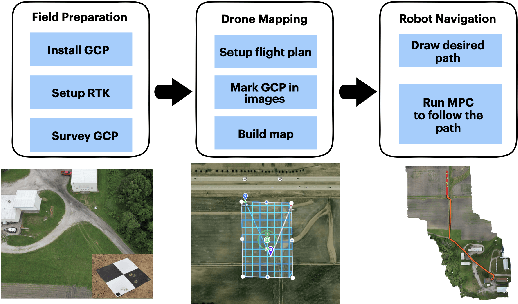

This paper presents a pipeline that combines high-resolution orthomosaic maps generated from UAS imagery with GPS-based global navigation to guide a skid-steered ground robot. We evaluated three path planning strategies: A* Graph search, Deep Q-learning (DQN) model, and Heuristic search, benchmarking them on planning time and success rate in realistic simulation environments. Experimental results reveal that the Heuristic search achieves the fastest planning times (0.28 ms) and a 100% success rate, while the A* approach delivers near-optimal performance, and the DQN model, despite its adaptability, incurs longer planning delays and occasional suboptimal routing. These results highlight the advantages of deterministic rule-based methods in geometrically constrained crop-row environments and lay the groundwork for future hybrid strategies in precision agriculture.
LiDAR-Based Crop Row Detection Algorithm for Over-Canopy Autonomous Navigation in Agriculture Fields
Mar 26, 2024



Autonomous navigation is crucial for various robotics applications in agriculture. However, many existing methods depend on RTK-GPS systems, which are expensive and susceptible to poor signal coverage. This paper introduces a state-of-the-art LiDAR-based navigation system that can achieve over-canopy autonomous navigation in row-crop fields, even when the canopy fully blocks the interrow spacing. Our crop row detection algorithm can detect crop rows across diverse scenarios, encompassing various crop types, growth stages, weed presence, and discontinuities within the crop rows. Without utilizing the global localization of the robot, our navigation system can perform autonomous navigation in these challenging scenarios, detect the end of the crop rows, and navigate to the next crop row autonomously, providing a crop-agnostic approach to navigate the whole row-crop field. This navigation system has undergone tests in various simulated agricultural fields, achieving an average of $2.98cm$ autonomous driving accuracy without human intervention on the custom Amiga robot. In addition, the qualitative results of our crop row detection algorithm from the actual soybean fields validate our LiDAR-based crop row detection algorithm's potential for practical agricultural applications.