 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Internet of Federated Things : A Vision for the Future and In-depth Survey of Data-driven Approaches for Federated Learning
Nov 09, 2021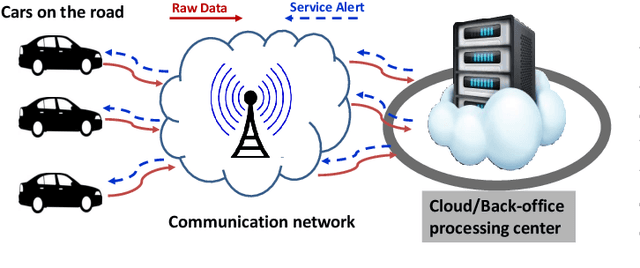
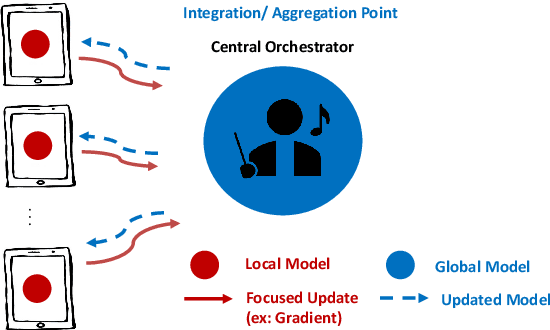
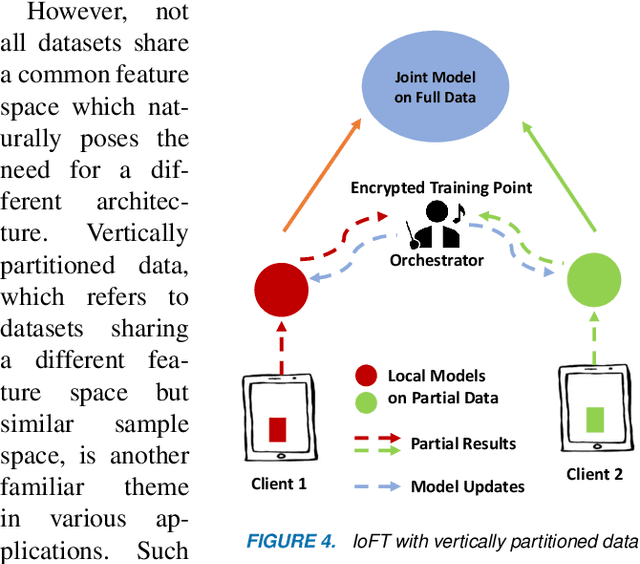
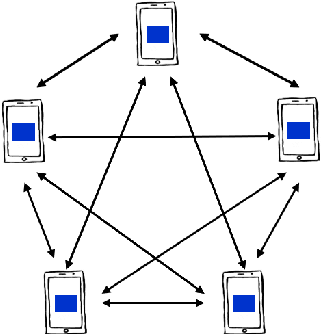
The Internet of Things (IoT) is on the verge of a major paradigm shift. In the IoT system of the future, IoFT, the cloud will be substituted by the crowd where model training is brought to the edge, allowing IoT devices to collaboratively extract knowledge and build smart analytics/models while keeping their personal data stored locally. This paradigm shift was set into motion by the tremendous increase in computational power on IoT devices and the recent advances in decentralized and privacy-preserving model training, coined as federated learning (FL). This article provides a vision for IoFT and a systematic overview of current efforts towards realizing this vision. Specifically, we first introduce the defining characteristics of IoFT and discuss FL data-driven approaches, opportunities, and challenges that allow decentralized inference within three dimensions: (i) a global model that maximizes utility across all IoT devices, (ii) a personalized model that borrows strengths across all devices yet retains its own model, (iii) a meta-learning model that quickly adapts to new devices or learning tasks. We end by describing the vision and challenges of IoFT in reshaping different industries through the lens of domain experts. Those industries include manufacturing, transportation, energy, healthcare, quality & reliability, business, and computing.
A Statistical Method for Parking Spaces Occupancy Detection via Automotive Radars
Nov 16, 2016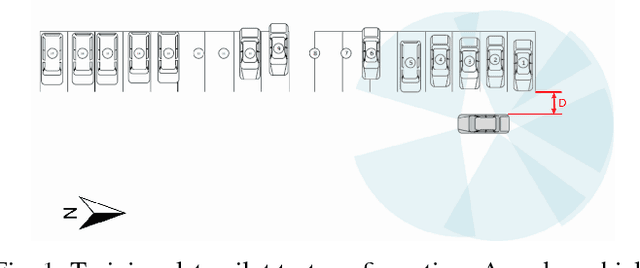
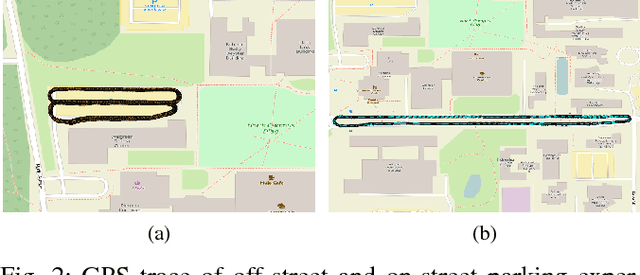
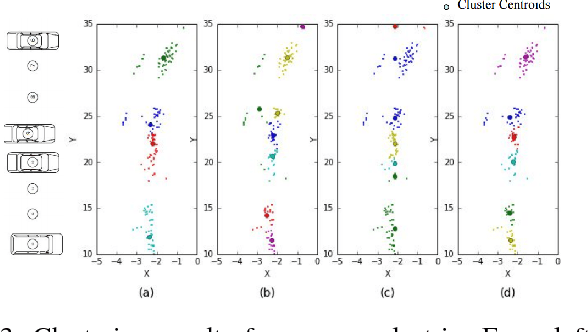
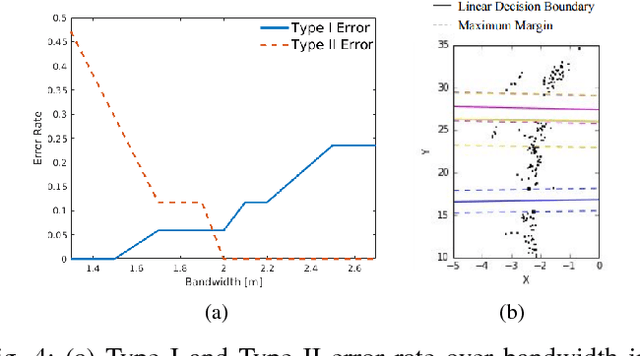
Real-time parking occupancy information is valuable for guiding drivers' searching for parking spaces. Recently many parking detection systems using range-based on-vehicle sensors are invented, but they disregard the practical difficulty of obtaining access to raw sensory data which are required for any feature-based algorithm. In this paper, we focus on a system using short-range radars (SRR) embedded in Advanced Driver Assistance System (ADAS) to collect occupancy information, and broadcast it through a connected vehicle network. The challenge that the data transmitted through ADAS unit has been encoded to sparse points is overcome by a statistical method instead of feature extractions. We propose a two-step classification algorithm combining Mean-Shift clustering and Support Vector Machine to analyze SRR-GPS data, and evaluate it through field experiments. The results show that the average Type I error rate for off-street parking is $15.23 \%$ and for on-street parking is $32.62\%$. In both cased the Type II error rates are less than $20 \%$. Bayesian updating can recursively improve the mapping results. This paper can provide a comprehensive method to elevate automotive sensors for the parking detection function.
An Evaluation of Information Sharing Parking Guidance Policies Using a Bayesian Approach
Nov 14, 2016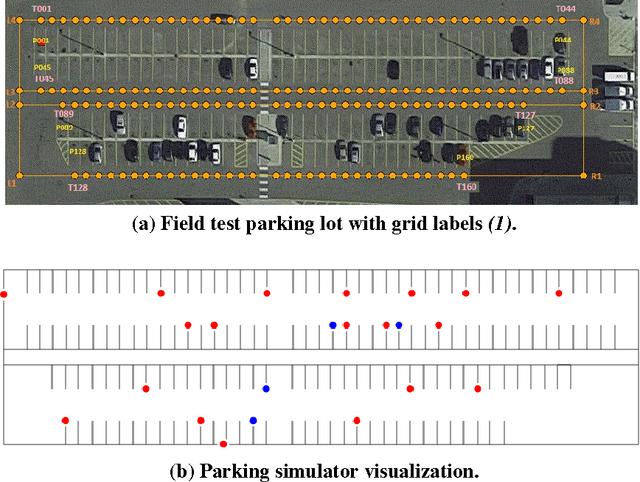
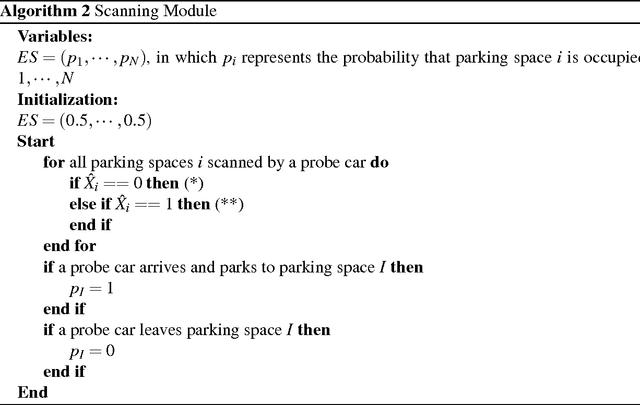
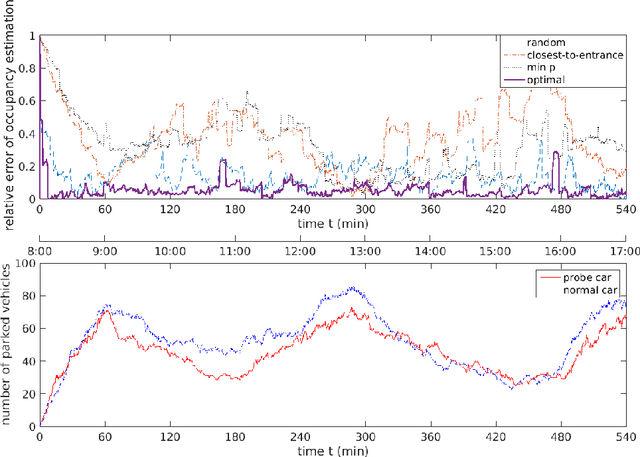
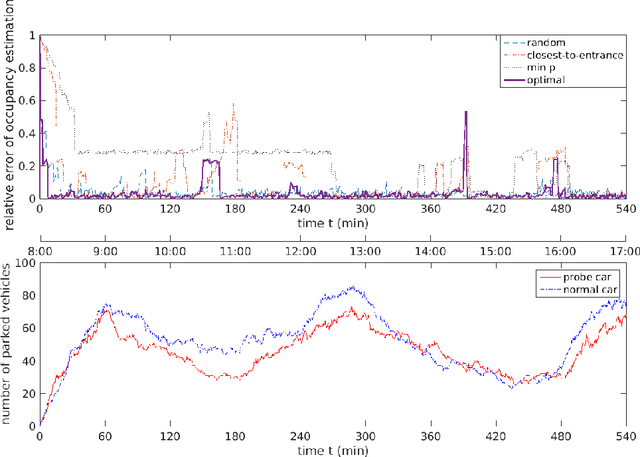
Real-time parking occupancy information is critical for a parking management system to facilitate drivers to park more efficiently. Recent advances in connected and automated vehicle technologies enable sensor-equipped cars (probe cars) to detect and broadcast available parking spaces when driving through parking lots. In this paper, we evaluate the impact of market penetration of probe cars on the system performance, and investigate different parking guidance policies to improve the data acquisition process. We adopt a simulation-based approach to impose four policies on an off- street parking lot influencing the behavior of probe cars to park in assigned parking spaces. This in turn effects the scanning route and the parking space occupancy estimations. The last policy we propose is a near-optimal guidance strategy that maximizes the information gain of posteriors. The results suggest that an efficient information gathering policy can compensate for low penetration of connected and automated vehicles. We also highlight the policy trade-off that occur while attempting to maximize information gain through explorations and improve assignment accuracy through exploitations. Our results can assist urban policy makers in designing and managing smart parking systems.