 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Agnostic Exoskeleton Control Supports Elderly Joint Energetics during Hip-Intensive Tasks
Mar 23, 2026Age-related mobility decline is frequently accompanied by a redistribution of joint kinetics, where older adults compensate for reduced ankle function by increasing demand on the hip. Paradoxically, this compensatory shift typically coincides with age-related reductions in maximal hip power. Although robotic exoskeletons can provide immediate energetic benefits, conventional control strategies have limited previous studies in this population to specific tasks such as steady-state walking, which do not fully reflect mobility demands in the home and community. Here, we implement a task-agnostic hip exoskeleton controller that is inherently sensitive to joint power and validate its efficacy in eight older adults. Across a battery of hip-intensive activities that included level walking, ramp ascent, stair climbing, and sit-to-stand transitions, the exoskeleton matched biological power profiles with high accuracy (mean cosine similarity 0.89). Assistance significantly reduced sagittal plane biological positive work by 24.7% at the hip and by 9.3% for the lower limb, while simultaneously augmenting peak total (biological + exoskeleton) hip power and reducing peak biological hip power. These results suggest that hip exoskeletons can potentially enhance endurance through biological work reduction, and increase functional reserve through total power augmentation, serving as a promising biomechanical intervention to support older adults' mobility.
Optimal Energy Shaping Control for a Backdrivable Hip Exoskeleton
Oct 07, 2022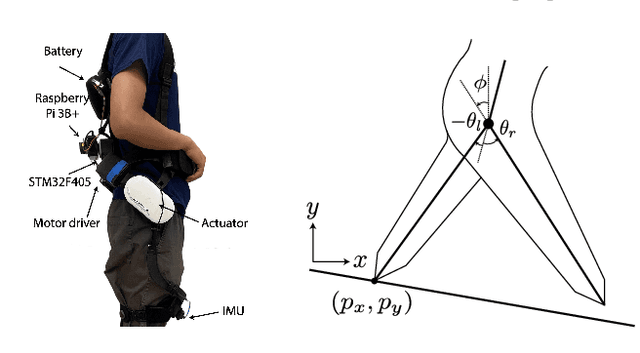
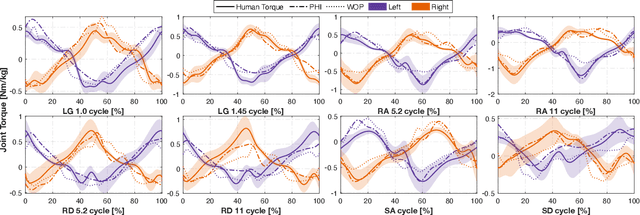
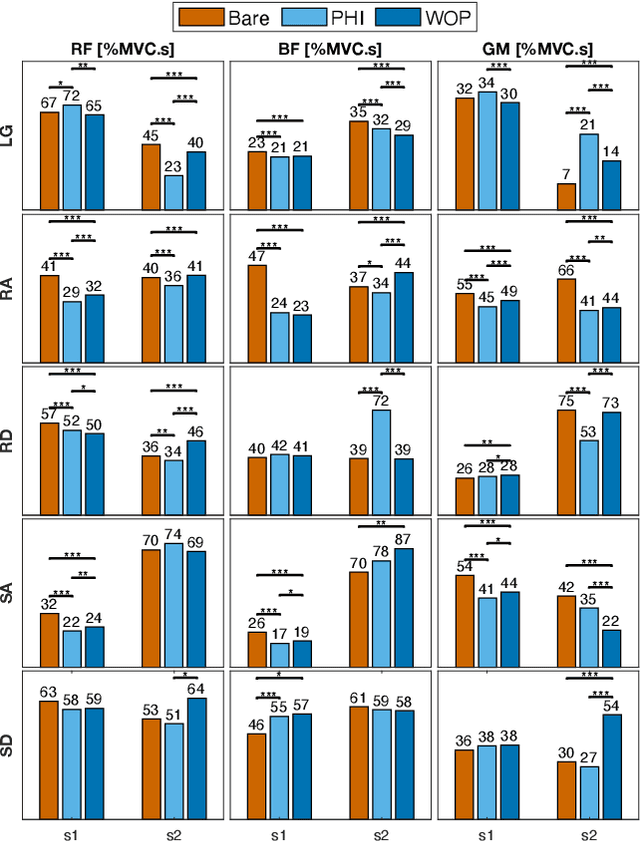
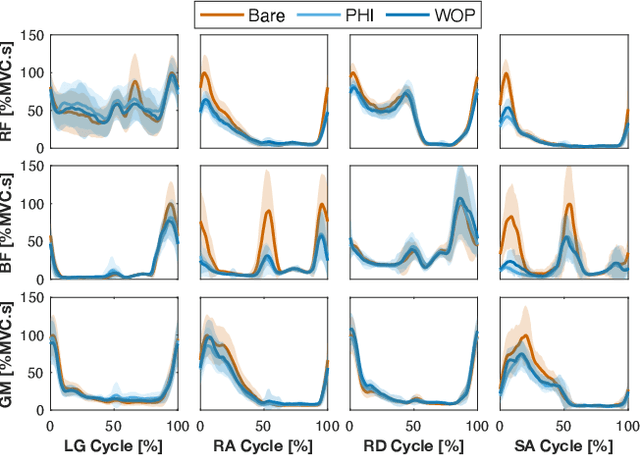
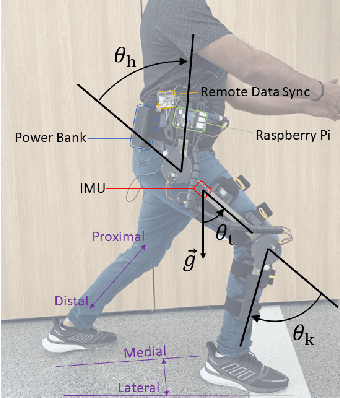
Task-dependent controllers widely used in exoskeletons track predefined trajectories, which overly constrain the volitional motion of individuals with remnant voluntary mobility. Energy shaping, on the other hand, provides task-invariant assistance by altering the human body's dynamic characteristics in the closed loop. While human-exoskeleton systems are often modeled using Euler-Lagrange equations, in our previous work we modeled the system as a port-controlled-Hamiltonian system, and a task-invariant controller was designed for a knee-ankle exoskeleton using interconnection-damping assignment passivity-based control. In this paper, we extend this framework to design a controller for a backdrivable hip exoskeleton to assist multiple tasks. A set of basis functions that contains information of kinematics is selected and corresponding coefficients are optimized, which allows the controller to provide torque that fits normative human torque for different activities of daily life. Human-subject experiments with two able-bodied subjects demonstrated the controller's capability to reduce muscle effort across different tasks.
Deep Convolutional Neural Network and Transfer Learning for Locomotion Intent Prediction
Sep 26, 2022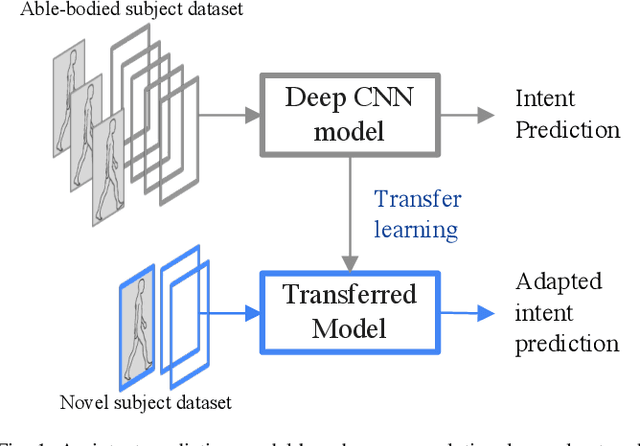
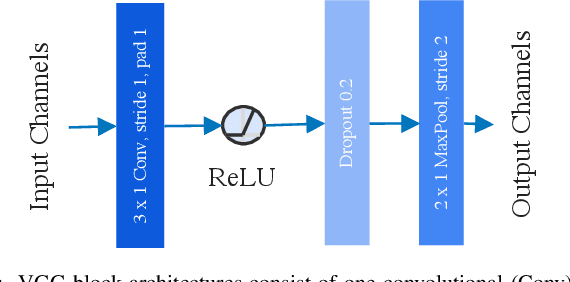
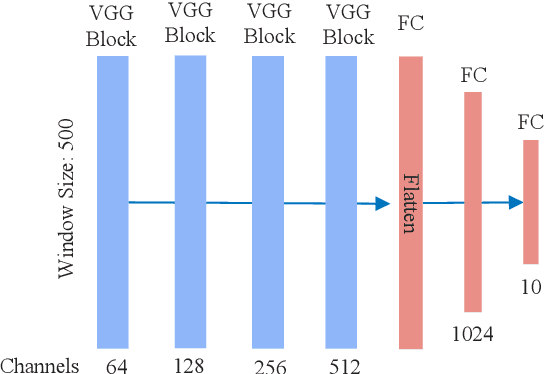
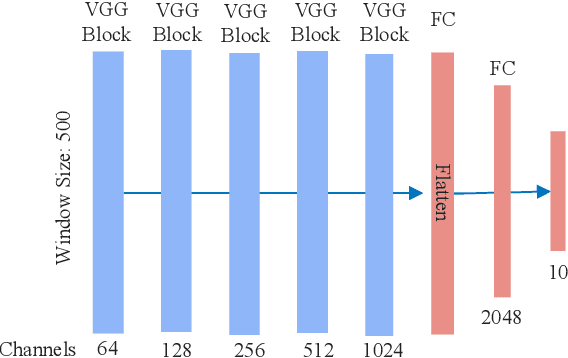
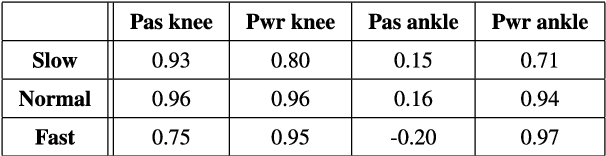
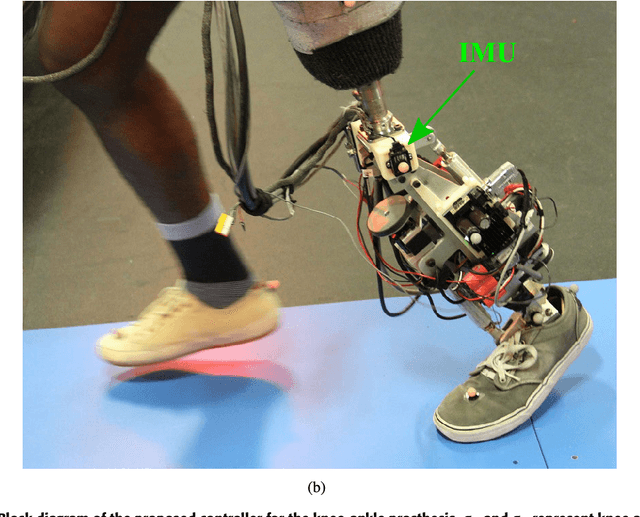
Powered prosthetic legs must anticipate the user's intent when switching between different locomotion modes (e.g., level walking, stair ascent/descent, ramp ascent/descent). Numerous data-driven classification techniques have demonstrated promising results for predicting user intent, but the performance of these intent prediction models on novel subjects remains undesirable. In other domains (e.g., image classification), transfer learning has improved classification accuracy by using previously learned features from a large dataset (i.e., pre-trained models) and then transferring this learned model to a new task where a smaller dataset is available. In this paper, we develop a deep convolutional neural network with intra-subject (subject-dependent) and inter-subject (subject-independent) validations based on a human locomotion dataset. We then apply transfer learning for the subject-independent model using a small portion (10%) of the data from the left-out subject. We compare the performance of these three models. Our results indicate that the transfer learning (TL) model outperforms the subject-independent (IND) model and is comparable to the subject-dependent (DEP) model (DEP Error: 0.74 $\pm$ 0.002%, IND Error: 11.59 $\pm$ 0.076%, TL Error: 3.57 $\pm$ 0.02% with 10% data). Moreover, as expected, transfer learning accuracy increases with the availability of more data from the left-out subject. We also evaluate the performance of the intent prediction system in various sensor configurations that may be available in a prosthetic leg application. Our results suggest that a thigh IMU on the the prosthesis is sufficient to predict locomotion intent in practice.
Real-Time Gait Phase and Task Estimation for Controlling a Powered Ankle Exoskeleton on Extremely Uneven Terrain
May 06, 2022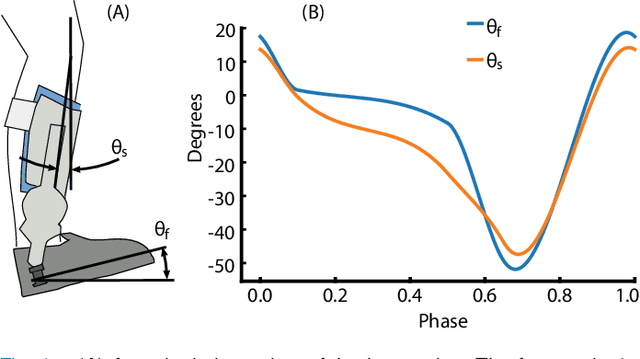
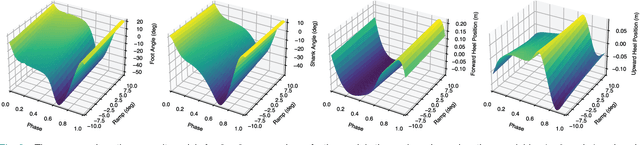
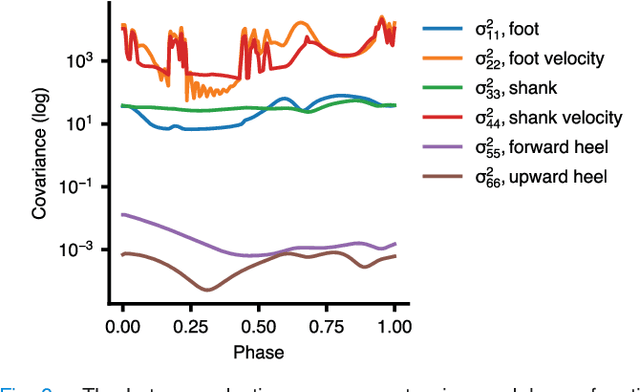
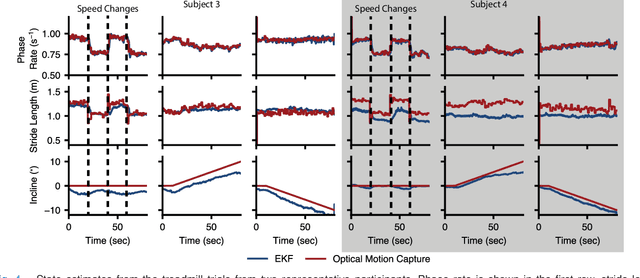
Positive biomechanical outcomes have been reported with lower-limb exoskeletons in laboratory settings, but these devices have difficulty delivering appropriate assistance in synchrony with human gait as the task or rate of phase progression change in real-world environments. This paper presents a torque controller for an ankle exoskeleton that uses state estimation with a data-driven kinematic model to continuously estimate the phase, phase rate, stride length, and ramp parameters during locomotion. The controller applies torque assistance based on the estimated phase and adapts the torque profile based on the estimated task variables to match human torques observed in a multi-activity database of 10 able-bodied subjects. We demonstrate in silico that the controller yields phase estimates that are more accurate than state of the art, while also estimating task variables with comparable accuracy to recent machine learning approaches. The controller implemented in an ankle exoskeleton successfully adapts its assistance in response to changing phase and task variables, both during controlled treadmill trials (6 able-bodied subjects) and a real-world stress test with extremely uneven terrain.
Enhancing Voluntary Motion with Modular, Backdrivable, Powered Hip and Knee Orthoses
Oct 04, 2021
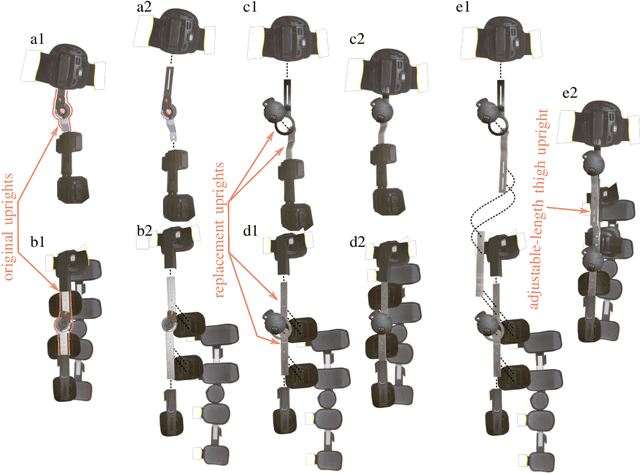
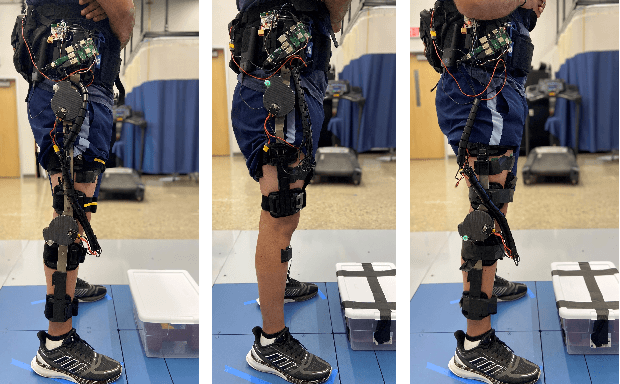
Mobility disabilities are prominent in society with wide-ranging detriments to affected individuals. Addressing the specific deficits of individuals within this heterogeneous population requires modular, partial-assist, lower-limb exoskeletons. This paper introduces the Modular Backdrivable Lower-limb Unloading Exoskeleton (M-BLUE), which implements high torque, low mechanical impedance actuators on commercial orthoses with sheet metal modifications to produce a variety of hip- and/or knee-assisting configurations. Benchtop system identification verifies the desirable backdrive properties of the actuator, and allows for torque prediction within 0.4 Nm. An able-bodied human subject experiment demonstrates that three unilateral configurations of M-BLUE (hip only, knee only, and hip-knee) with a simple gravity compensation controller can reduce muscle EMG readings in a lifting and lowering task relative to the bare condition. Reductions in mean muscular effort and peak muscle activation were seen across the primary squat musculature (excluding biceps femoris), demonstrating the potential to reduce fatigue leading to poor lifting posture. These promising results motivate applications of M-BLUE to additional subject populations such as hip/knee osteoarthritis and geriatric frailty, and the expansion of M-BLUE to bilateral and ankle configurations.
Lower-limb kinematics and kinetics during continuously varying human locomotion
Aug 27, 2021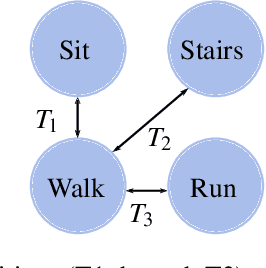

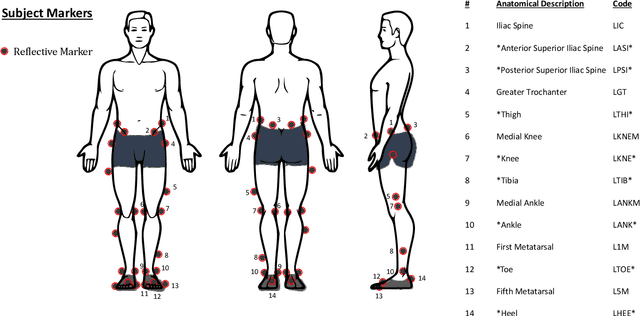
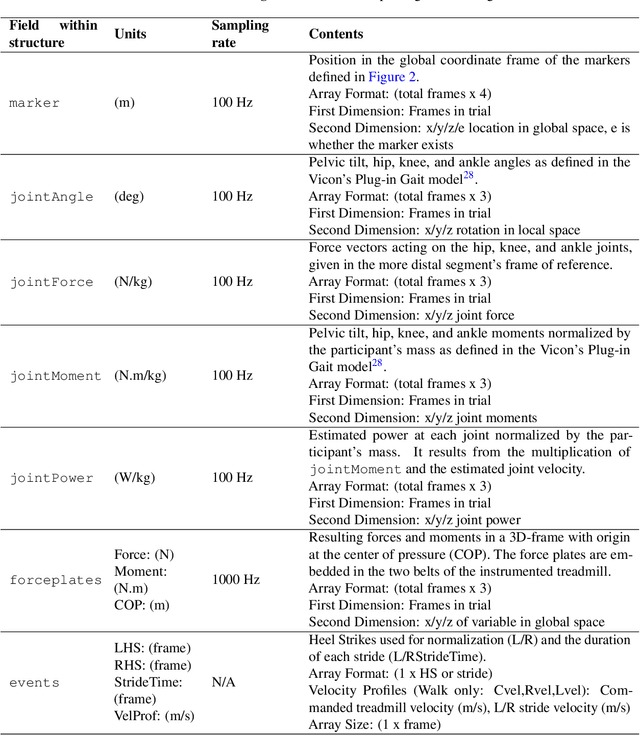
Human locomotion involves continuously variable activities including walking, running, and stair climbing over a range of speeds and inclinations as well as sit-stand, walk-run, and walk-stairs transitions. Understanding the kinematics and kinetics of the lower limbs during continuously varying locomotion is fundamental to developing robotic prostheses and exoskeletons that assist in community ambulation. However, available datasets on human locomotion neglect transitions between activities and/or continuous variations in speed and inclination during these activities. This data paper reports a new dataset that includes the lower-limb kinematics and kinetics of ten able-bodied participants walking at multiple inclines ($\pm$ 0, 5, 10 $^{\circ}$) and speeds (0.8, 1, 1.2 m/s), running at multiple speeds (1.8, 2, 2.2, 2.4 m/s), walking and running with constant acceleration ($\pm$ 0.2, 0.5 $\text{m/s^2}$), and stair ascent/descent with multiple stair inclines (20, 25, 30, 35 $^{\circ}$). This dataset also includes sit-stand transitions, walk-run transitions, and walk-stairs transitions. Data were recorded by a Vicon motion capture system and, for applicable tasks, a Bertec instrumented treadmill.
A Phase Variable Approach for Improved Rhythmic and Non-Rhythmic Control of a Powered Knee-Ankle Prosthesis
Apr 12, 2019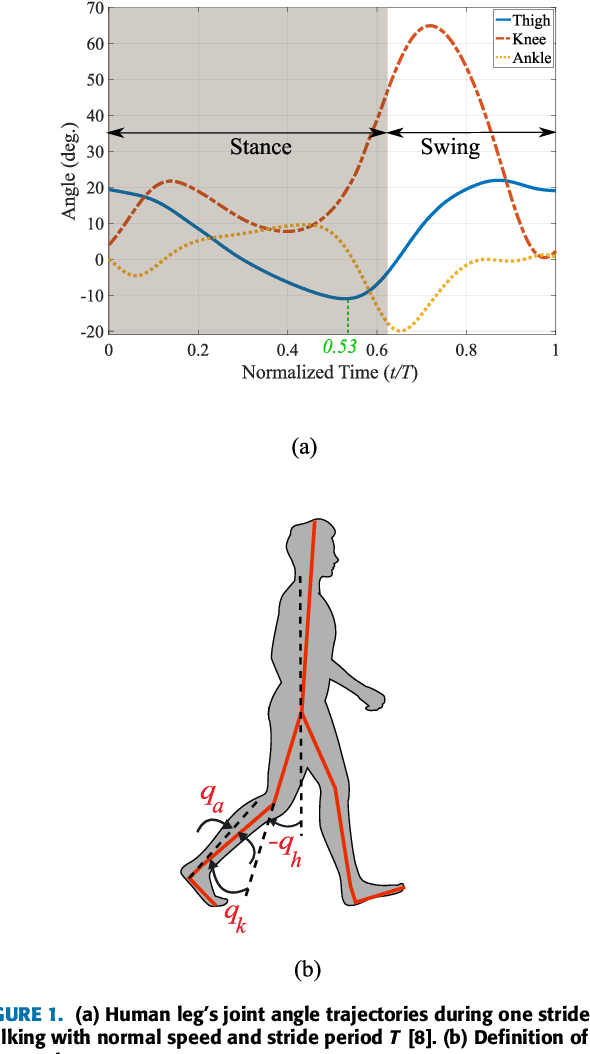
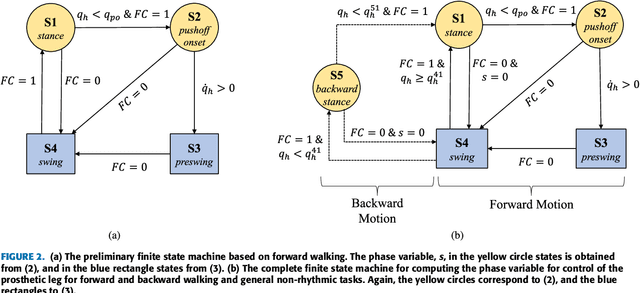
Although there has been recent progress in control of multi-joint prosthetic legs for rhythmic tasks such as walking, control of these systems for non-rhythmic motions and general real-world maneuvers is still an open problem. In this article, we develop a new controller that is capable of both rhythmic (constant-speed) walking, transitions between speeds and/or tasks, and some common volitional leg motions. We introduce a new piecewise holonomic phase variable, which, through a finite state machine, forms the basis of our controller. The phase variable is constructed by measuring the thigh angle, and the transitions in the finite state machine are formulated through sensing foot contact along with attributes of a nominal reference gait trajectory. The controller was implemented on a powered knee-ankle prosthesis and tested with a transfemoral amputee subject, who successfully performed a wide range of rhythmic and non-rhythmic tasks, including slow and fast walking, quick start and stop, backward walking, walking over obstacles, and kicking a soccer ball. Use of the powered leg resulted in clinically significant reductions in amputee compensations for rhythmic tasks (including vaulting and hip circumduction) when compared to use of the take-home passive leg. In addition, considerable improvements were also observed in the performance for non-rhythmic tasks. The proposed approach is expected to provide a better understanding of rhythmic and non-rhythmic motions in a unified framework, which in turn can lead to more reliable control of multi-joint prostheses for a wider range of real-world tasks.
Robust Optimal Design of Energy Efficient Series Elastic Actuators: Application to a Powered Prosthetic Ankle
Feb 06, 2019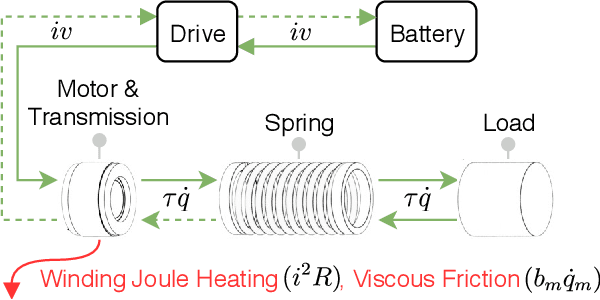
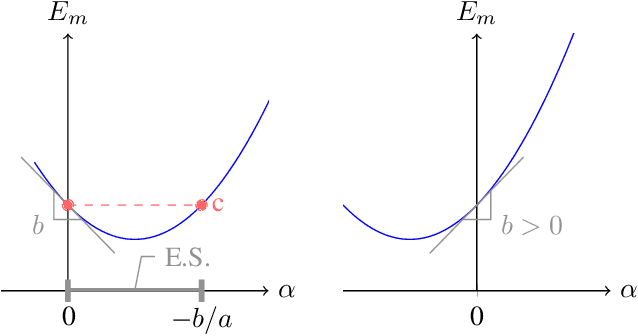
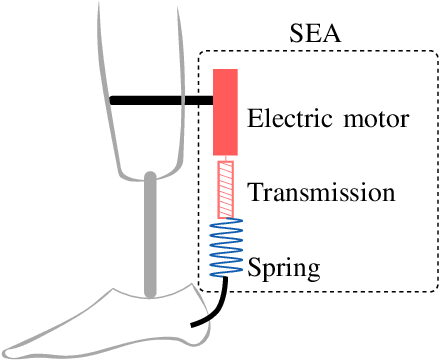
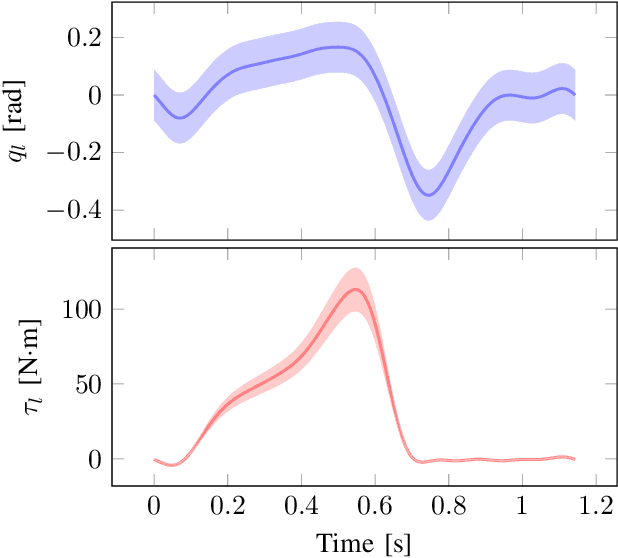
Design of robotic systems that safely and efficiently operate in uncertain operational conditions, such as rehabilitation and physical assistance robots, remains an important challenge in the field. Current methods for the design of energy efficient series elastic actuators use an optimization formulation that typically assumes known operational conditions. This approach could lead to actuators that cannot perform in uncertain environments because elongation, speed, or torque requirements may be beyond actuator specifications when the operation deviates from its nominal conditions. Addressing this gap, we propose a convex optimization formulation to design the stiffness of series elastic actuators to minimize energy consumption and satisfy actuator constraints despite uncertainty due to manufacturing of the spring, unmodeled dynamics, efficiency of the transmission, and the kinematics and kinetics of the load. In our formulation, we express energy consumption as a scalar convex-quadratic function of compliance. In the unconstrained case, this quadratic equation provides an analytical solution to the optimal value of stiffness that minimizes energy consumption for arbitrary periodic reference trajectories. As actuator constraints, we consider peak motor torque, peak motor velocity, limitations due to the speed-torque relationship of DC motors, and peak elongation of the spring. As a simulation case study, we apply our formulation to the robust design of a series elastic actuator for a powered prosthetic ankle. Our simulation results indicate that a small trade-off between energy efficiency and robustness is justified to design actuators that can operate with uncertainty.