 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProximal powered knee placement: a case study
Feb 19, 2026Lower limb amputation affects millions worldwide, leading to impaired mobility, reduced walking speed, and limited participation in daily and social activities. Powered prosthetic knees can partially restore mobility by actively assisting knee joint torque, improving gait symmetry, sit-to-stand transitions, and walking speed. However, added mass from powered components may diminish these benefits, negatively affecting gait mechanics and increasing metabolic cost. Consequently, optimizing mass distribution, rather than simply minimizing total mass, may provide a more effective and practical solution. In this exploratory study, we evaluated the feasibility of above-knee powertrain placement for a powered prosthetic knee in a small cohort. Compared to below-knee placement, the above-knee configuration demonstrated improved walking speed (+9.2% for one participant) and cadence (+3.6%), with mixed effects on gait symmetry. Kinematic measures indicated similar knee range of motion and peak velocity across configurations. Additional testing on ramps and stairs confirmed the robustness of the control strategy across multiple locomotion tasks. These preliminary findings suggest that above-knee placement is functionally feasible and that careful mass distribution can preserve the benefits of powered assistance while mitigating adverse effects of added weight. Further studies are needed to confirm these trends and guide design and clinical recommendations.
Lower-limb kinematics and kinetics during continuously varying human locomotion
Aug 27, 2021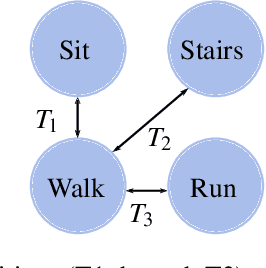

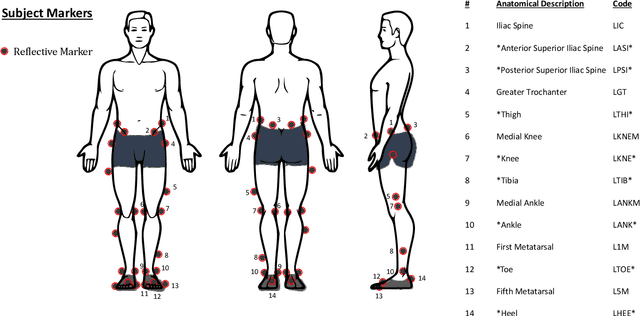
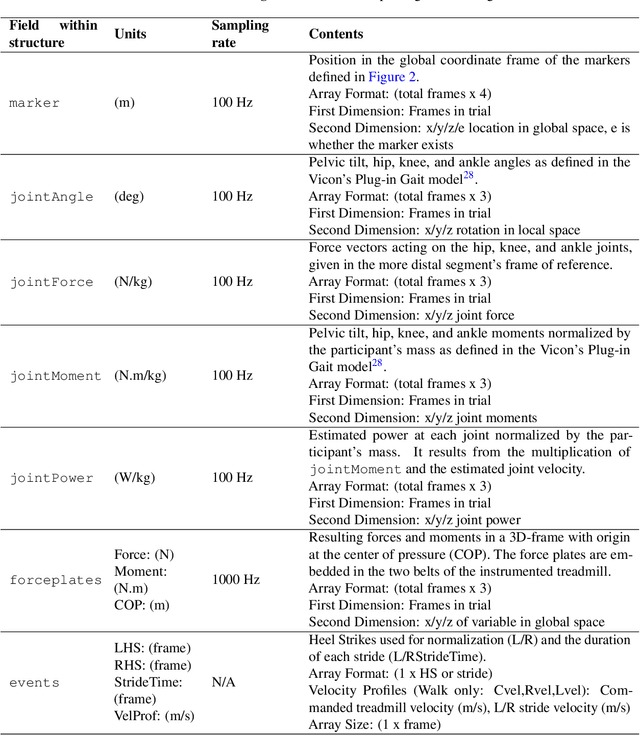
Human locomotion involves continuously variable activities including walking, running, and stair climbing over a range of speeds and inclinations as well as sit-stand, walk-run, and walk-stairs transitions. Understanding the kinematics and kinetics of the lower limbs during continuously varying locomotion is fundamental to developing robotic prostheses and exoskeletons that assist in community ambulation. However, available datasets on human locomotion neglect transitions between activities and/or continuous variations in speed and inclination during these activities. This data paper reports a new dataset that includes the lower-limb kinematics and kinetics of ten able-bodied participants walking at multiple inclines ($\pm$ 0, 5, 10 $^{\circ}$) and speeds (0.8, 1, 1.2 m/s), running at multiple speeds (1.8, 2, 2.2, 2.4 m/s), walking and running with constant acceleration ($\pm$ 0.2, 0.5 $\text{m/s^2}$), and stair ascent/descent with multiple stair inclines (20, 25, 30, 35 $^{\circ}$). This dataset also includes sit-stand transitions, walk-run transitions, and walk-stairs transitions. Data were recorded by a Vicon motion capture system and, for applicable tasks, a Bertec instrumented treadmill.