 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Object Visibility Prediction in Autonomous Driving
Mar 06, 2024



With the rapid advancement of hardware and software technologies, research in autonomous driving has seen significant growth. The prevailing framework for multi-sensor autonomous driving encompasses sensor installation, perception, path planning, decision-making, and motion control. At the perception phase, a common approach involves utilizing neural networks to infer 3D bounding box (Bbox) attributes from raw sensor data, including classification, size, and orientation. In this paper, we present a novel attribute and its corresponding algorithm: 3D object visibility. By incorporating multi-task learning, the introduction of this attribute, visibility, negligibly affects the model's effectiveness and efficiency. Our proposal of this attribute and its computational strategy aims to expand the capabilities for downstream tasks, thereby enhancing the safety and reliability of real-time autonomous driving in real-world scenarios.
ICAT: An Indoor Connected and Autonomous Testbed for Vehicle Computing
Mar 06, 2024



Indoor autonomous driving testbeds have emerged to complement expensive outdoor testbeds and virtual simulations, offering scalable and cost-effective solutions for research in navigation, traffic optimization, and swarm intelligence. However, they often lack the robust sensing and computing infrastructure for advanced research. Addressing these limitations, we introduce the Indoor Connected Autonomous Testbed (ICAT), a platform that not only tackles the unique challenges of indoor autonomous driving but also innovates vehicle computing and V2X communication. Moreover, ICAT leverages digital twins through CARLA and SUMO simulations, facilitating both centralized and decentralized autonomy deployments.
Autonomous Shuttle Operation for Vulnerable Populations: Lessons and Experiences
Feb 28, 2024



The increasing shortage of drivers poses a significant threat to vulnerable populations, particularly seniors and disabled individuals who heavily depend on public transportation for accessing healthcare services and social events. Autonomous Vehicles (AVs) emerge as a promising alternative, offering potential improvements in accessibility and independence for these groups. However, current designs and studies often overlook the unique needs and experiences of these populations, leading to potential accessibility barriers. This paper presents a detailed case study of an autonomous shuttle test specifically tailored for seniors and disabled individuals, conducted during the early stages of the COVID-19 pandemic. The service, which lasted 13 weeks, catered to approximately 1500 passengers in an urban setting, aiming to facilitate access to essential services. Drawing from the safety operator's experiences and direct observations, we identify critical user experience and safety challenges faced by vulnerable passengers. Based on our findings, we propose targeted initiatives to enhance the safety, accessibility, and user education of AV technology for seniors and disabled individuals. These include increasing educational opportunities to familiarize these groups with AV technology, designing AVs with a focus on diversity and inclusion, and improving training programs for AV operators to address the unique needs of vulnerable populations. Through these initiatives, we aim to bridge the gap in AV accessibility and ensure that these technologies benefit all members of society.
Computing Systems for Autonomous Driving: State-of-the-Art and Challenges
Sep 30, 2020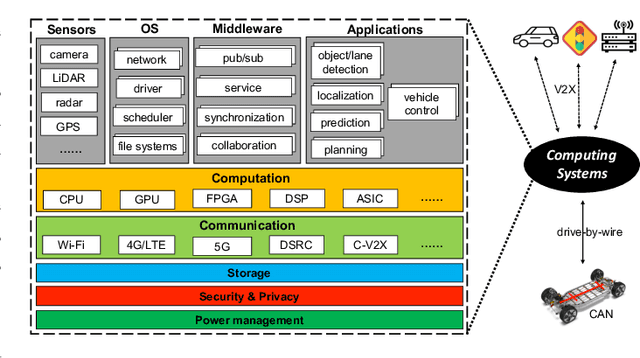
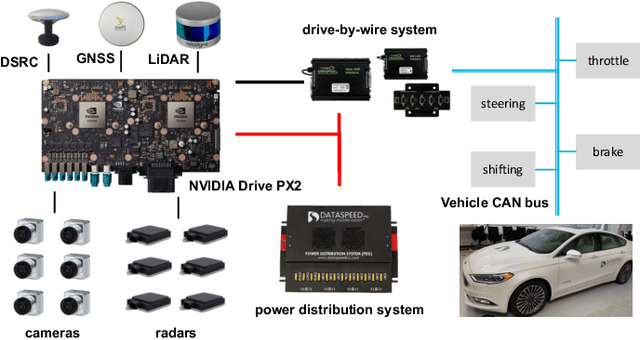
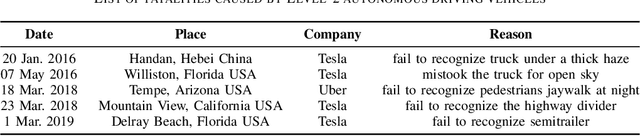
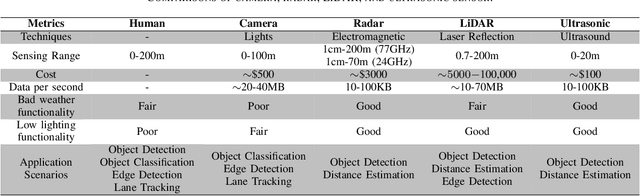
The recent proliferation of computing technologies, e.g., sensors, computer vision, machine learning, hardware acceleration, and the broad deployment of communication mechanisms, e.g., DSRC, C-V2X, 5G, have pushed the horizon of autonomous driving, which automates the decision and control of vehicles by leveraging the perception results based on multiple sensors. The key to the success of these autonomous systems is making a reliable decision in a real-time fashion. However, accidents and fatalities caused by early deployed autonomous vehicles arise from time to time. The real traffic environment is too complicated for the current autonomous driving computing systems to understand and handle. In this paper, we present the state-of-the-art computing systems for autonomous driving, including seven performance metrics and nine key technologies, followed by eleven challenges and opportunities to realize autonomous driving. We hope this paper will gain attention from both the computing and automotive communities and inspire more research in this direction.