 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoE-ACT: Improving Surgical Imitation Learning Policies through Supervised Mixture-of-Experts
Jan 29, 2026Imitation learning has achieved remarkable success in robotic manipulation, yet its application to surgical robotics remains challenging due to data scarcity, constrained workspaces, and the need for an exceptional level of safety and predictability. We present a supervised Mixture-of-Experts (MoE) architecture designed for phase-structured surgical manipulation tasks, which can be added on top of any autonomous policy. Unlike prior surgical robot learning approaches that rely on multi-camera setups or thousands of demonstrations, we show that a lightweight action decoder policy like Action Chunking Transformer (ACT) can learn complex, long-horizon manipulation from less than 150 demonstrations using solely stereo endoscopic images, when equipped with our architecture. We evaluate our approach on the collaborative surgical task of bowel grasping and retraction, where a robot assistant interprets visual cues from a human surgeon, executes targeted grasping on deformable tissue, and performs sustained retraction. We benchmark our method against state-of-the-art Vision-Language-Action (VLA) models and the standard ACT baseline. Our results show that generalist VLAs fail to acquire the task entirely, even under standard in-distribution conditions. Furthermore, while standard ACT achieves moderate success in-distribution, adopting a supervised MoE architecture significantly boosts its performance, yielding higher success rates in-distribution and demonstrating superior robustness in out-of-distribution scenarios, including novel grasp locations, reduced illumination, and partial occlusions. Notably, it generalizes to unseen testing viewpoints and also transfers zero-shot to ex vivo porcine tissue without additional training, offering a promising pathway toward in vivo deployment. To support this, we present qualitative preliminary results of policy roll-outs during in vivo porcine surgery.
Interactive Surgical Liver Phantom for Cholecystectomy Training
Sep 05, 2024



Training and prototype development in robot-assisted surgery requires appropriate and safe environments for the execution of surgical procedures. Current dry lab laparoscopy phantoms often lack the ability to mimic complex, interactive surgical tasks. This work presents an interactive surgical phantom for the cholecystectomy. The phantom enables the removal of the gallbladder during cholecystectomy by allowing manipulations and cutting interactions with the synthetic tissue. The force-displacement behavior of the gallbladder is modelled based on retraction demonstrations. The force model is compared to the force model of ex-vivo porcine gallbladders and evaluated on its ability to estimate retraction forces.
LapGym -- An Open Source Framework for Reinforcement Learning in Robot-Assisted Laparoscopic Surgery
Feb 19, 2023



Recent advances in reinforcement learning (RL) have increased the promise of introducing cognitive assistance and automation to robot-assisted laparoscopic surgery (RALS). However, progress in algorithms and methods depends on the availability of standardized learning environments that represent skills relevant to RALS. We present LapGym, a framework for building RL environments for RALS that models the challenges posed by surgical tasks, and sofa_env, a diverse suite of 12 environments. Motivated by surgical training, these environments are organized into 4 tracks: Spatial Reasoning, Deformable Object Manipulation & Grasping, Dissection, and Thread Manipulation. Each environment is highly parametrizable for increasing difficulty, resulting in a high performance ceiling for new algorithms. We use Proximal Policy Optimization (PPO) to establish a baseline for model-free RL algorithms, investigating the effect of several environment parameters on task difficulty. Finally, we show that many environments and parameter configurations reflect well-known, open problems in RL research, allowing researchers to continue exploring these fundamental problems in a surgical context. We aim to provide a challenging, standard environment suite for further development of RL for RALS, ultimately helping to realize the full potential of cognitive surgical robotics. LapGym is publicly accessible through GitHub (https://github.com/ScheiklP/lap_gym).
LapSeg3D: Weakly Supervised Semantic Segmentation of Point Clouds Representing Laparoscopic Scenes
Jul 15, 2022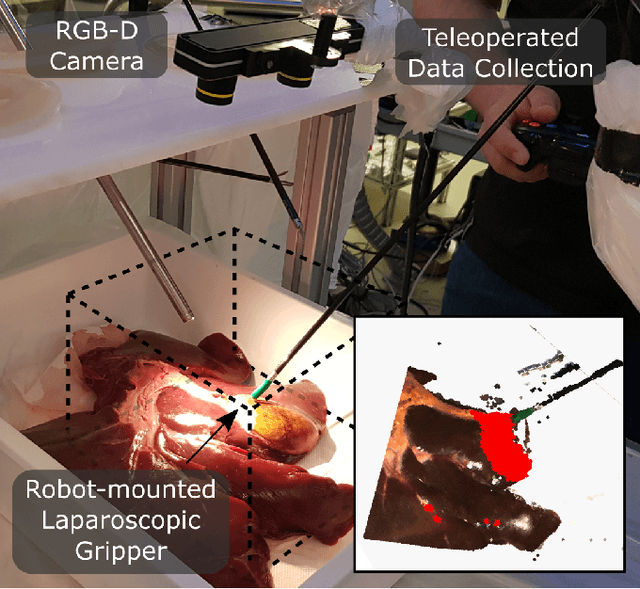
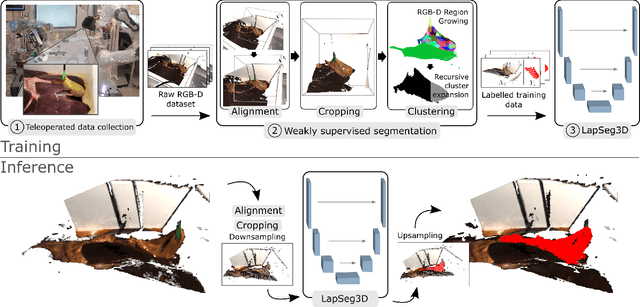
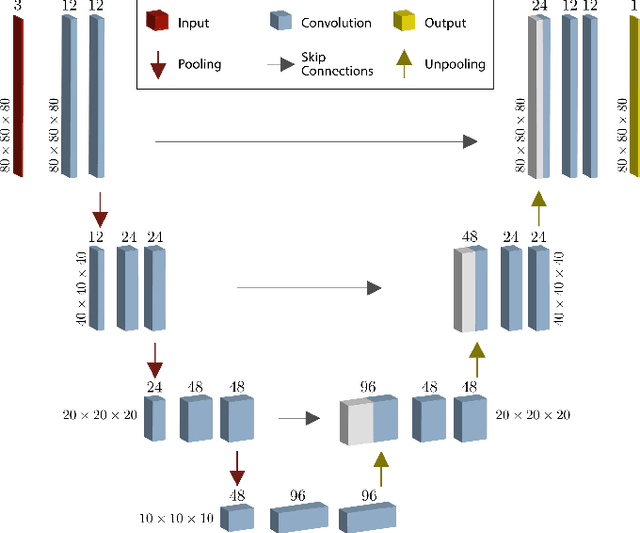
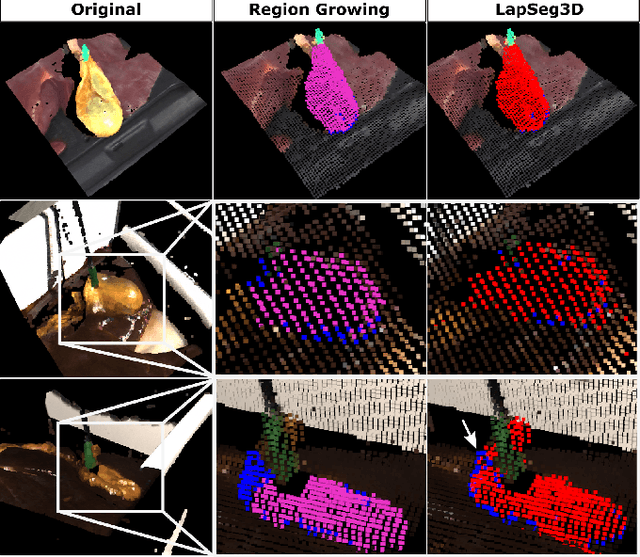
The semantic segmentation of surgical scenes is a prerequisite for task automation in robot assisted interventions. We propose LapSeg3D, a novel DNN-based approach for the voxel-wise annotation of point clouds representing surgical scenes. As the manual annotation of training data is highly time consuming, we introduce a semi-autonomous clustering-based pipeline for the annotation of the gallbladder, which is used to generate segmented labels for the DNN. When evaluated against manually annotated data, LapSeg3D achieves an F1 score of 0.94 for gallbladder segmentation on various datasets of ex-vivo porcine livers. We show LapSeg3D to generalize accurately across different gallbladders and datasets recorded with different RGB-D camera systems.
Cooperative Assistance in Robotic Surgery through Multi-Agent Reinforcement Learning
Oct 10, 2021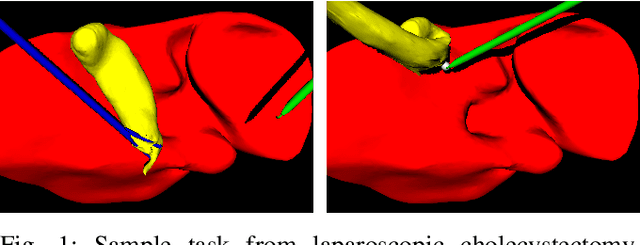
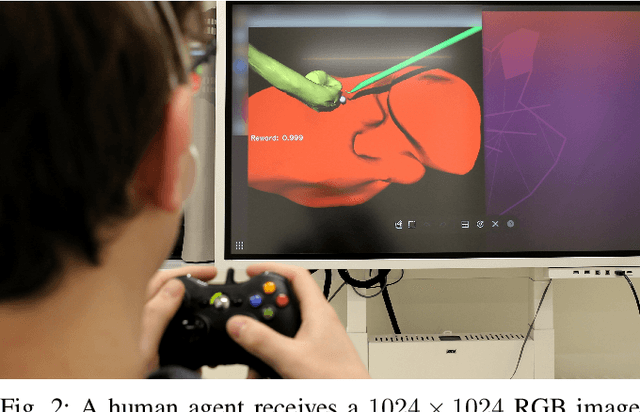
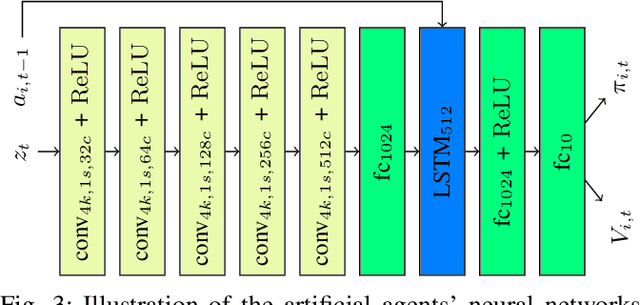
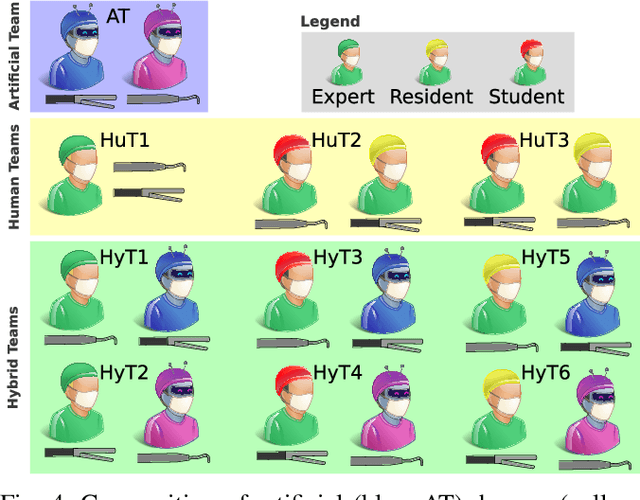
Cognitive cooperative assistance in robot-assisted surgery holds the potential to increase quality of care in minimally invasive interventions. Automation of surgical tasks promises to reduce the mental exertion and fatigue of surgeons. In this work, multi-agent reinforcement learning is demonstrated to be robust to the distribution shift introduced by pairing a learned policy with a human team member. Multi-agent policies are trained directly from images in simulation to control multiple instruments in a sub task of the minimally invasive removal of the gallbladder. These agents are evaluated individually and in cooperation with humans to demonstrate their suitability as autonomous assistants. Compared to human teams, the hybrid teams with artificial agents perform better considering completion time (44.4% to 71.2% shorter) as well as number of collisions (44.7% to 98.0% fewer). Path lengths, however, increase under control of an artificial agent (11.4% to 33.5% longer). A multi-agent formulation of the learning problem was favored over a single-agent formulation on this surgical sub task, due to the sequential learning of the two instruments. This approach may be extended to other tasks that are difficult to formulate within the standard reinforcement learning framework. Multi-agent reinforcement learning may shift the paradigm of cognitive robotic surgery towards seamless cooperation between surgeons and assistive technologies.