 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise Robot Command Understanding Using Grammar-Constrained Large Language Models
Apr 05, 2026Human-robot collaboration in industrial settings requires precise and reliable communication to enhance operational efficiency. While Large Language Models (LLMs) understand general language, they often lack the domain-specific rigidity needed for safe and executable industrial commands. To address this gap, this paper introduces a novel grammar-constrained LLM that integrates a grammar-driven Natural Language Understanding (NLU) system with a fine-tuned LLM, which enables both conversational flexibility and the deterministic precision required in robotics. Our method employs a two-stage process. First, a fine-tuned LLM performs high-level contextual reasoning and parameter inference on natural language inputs. Second, a Structured Language Model (SLM) and a grammar-based canonicalizer constrain the LLM's output, forcing it into a standardized symbolic format composed of valid action frames and command elements. This process guarantees that generated commands are valid and structured in a robot-readable JSON format. A key feature of the proposed model is a validation and feedback loop. A grammar parser validates the output against a predefined list of executable robotic actions. If a command is invalid, the system automatically generates corrective prompts and re-engages the LLM. This iterative self-correction mechanism allows the model to recover from initial interpretation errors to improve system robustness. We evaluate our grammar-constrained hybrid model against two baselines: a fine-tuned API-based LLM and a standalone grammar-driven NLU model. Using the Human Robot Interaction Corpus (HuRIC) dataset, we demonstrate that the hybrid approach achieves superior command validity, which promotes safer and more effective industrial human-robot collaboration.
Neural Operator for Accelerating Coronal Magnetic Field Model
May 21, 2024



Studying the sun's outer atmosphere is challenging due to its complex magnetic fields impacting solar activities. Magnetohydrodynamics (MHD) simulations help model these interactions but are extremely time-consuming (usually on a scale of days). Our research applies the Fourier Neural Operator (FNO) to accelerate the coronal magnetic field modeling, specifically, the Bifrost MHD model. We apply Tensorized FNO (TFNO) to generate solutions from partial differential equations (PDEs) over a 3D domain efficiently. TFNO's performance is compared with other deep learning methods, highlighting its accuracy and scalability. Physics analysis confirms that TFNO is reliable and capable of accelerating MHD simulations with high precision. This advancement improves efficiency in data handling, enhances predictive capabilities, and provides a better understanding of magnetic topologies.
Self-scalable Tanh (Stan): Faster Convergence and Better Generalization in Physics-informed Neural Networks
Apr 29, 2022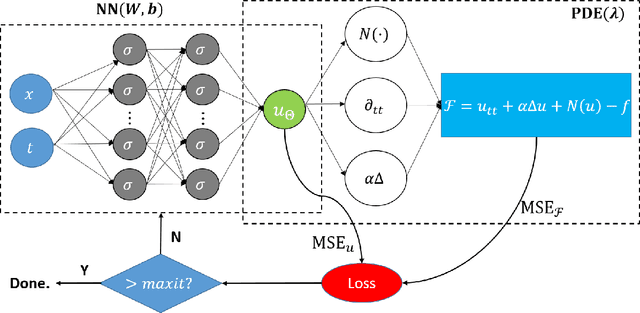
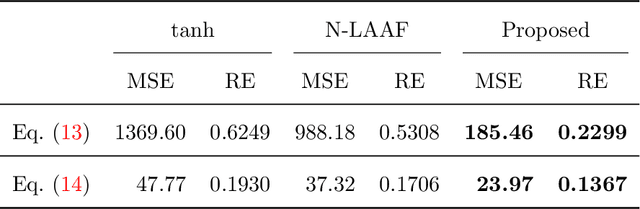
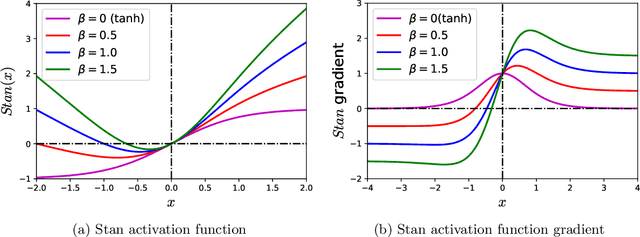
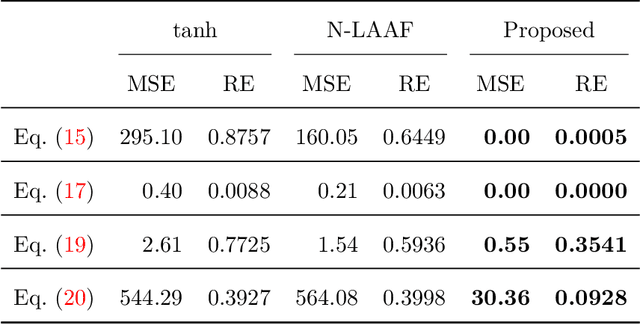
Physics-informed Neural Networks (PINNs) are gaining attention in the engineering and scientific literature for solving a range of differential equations with applications in weather modeling, healthcare, manufacturing, etc. Poor scalability is one of the barriers to utilizing PINNs for many real-world problems. To address this, a Self-scalable tanh (Stan) activation function is proposed for the PINNs. The proposed Stan function is smooth, non-saturating, and has a trainable parameter. During training, it can allow easy flow of gradients to compute the required derivatives and also enable systematic scaling of the input-output mapping. It is shown theoretically that the PINNs with the proposed Stan function have no spurious stationary points when using gradient descent algorithms. The proposed Stan is tested on a number of numerical studies involving general regression problems. It is subsequently used for solving multiple forward problems, which involve second-order derivatives and multiple dimensions, and an inverse problem where the thermal diffusivity of a rod is predicted with heat conduction data. These case studies establish empirically that the Stan activation function can achieve better training and more accurate predictions than the existing activation functions in the literature.