 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormally Guaranteed Control Adaptation for ODD-Resilient Autonomous Systems
Apr 08, 2026Ensuring reliable performance in situations outside the Operational Design Domain (ODD) remains a primary challenge in devising resilient autonomous systems. We explore this challenge by introducing an approach for adapting probabilistic system models to handle out-of-ODD scenarios while, in parallel, providing quantitative guarantees. Our approach dynamically extends the coverage of existing system situation capabilities, supporting the verification and adaptation of the system's behaviour under unanticipated situations. Preliminary results demonstrate that our approach effectively increases system reliability by adapting its behaviour and providing formal guarantees even under unforeseen out-of-ODD situations.
Safe Reinforcement Learning in Black-Box Environments via Adaptive Shielding
May 28, 2024Empowering safe exploration of reinforcement learning (RL) agents during training is a critical impediment towards deploying RL agents in many real-world scenarios. Training RL agents in unknown, black-box environments poses an even greater safety risk when prior knowledge of the domain/task is unavailable. We introduce ADVICE (Adaptive Shielding with a Contrastive Autoencoder), a novel post-shielding technique that distinguishes safe and unsafe features of state-action pairs during training, thus protecting the RL agent from executing actions that yield potentially hazardous outcomes. Our comprehensive experimental evaluation against state-of-the-art safe RL exploration techniques demonstrates how ADVICE can significantly reduce safety violations during training while maintaining a competitive outcome reward.
Bayesian Learning for the Robust Verification of Autonomous Robots
Mar 15, 2023We develop a novel Bayesian learning framework that enables the runtime verification of autonomous robots performing critical missions in uncertain environments. Our framework exploits prior knowledge and observations of the verified robotic system to learn expected ranges of values for the occurrence rates of its events. We support both events observed regularly during system operation, and singular events such as catastrophic failures or the completion of difficult one-off tasks. Furthermore, we use the learnt event-rate ranges to assemble interval continuous-time Markov models, and we apply quantitative verification to these models to compute expected intervals of variation for key system properties. These intervals reflect the uncertainty intrinsic to many real-world systems, enabling the robust verification of their quantitative properties under parametric uncertainty. We apply the proposed framework to the case study of verification of an autonomous robotic mission for underwater infrastructure inspection and repair.
Closed-loop Analysis of Vision-based Autonomous Systems: A Case Study
Feb 06, 2023Deep neural networks (DNNs) are increasingly used in safety-critical autonomous systems as perception components processing high-dimensional image data. Formal analysis of these systems is particularly challenging due to the complexity of the perception DNNs, the sensors (cameras), and the environment conditions. We present a case study applying formal probabilistic analysis techniques to an experimental autonomous system that guides airplanes on taxiways using a perception DNN. We address the above challenges by replacing the camera and the network with a compact probabilistic abstraction built from the confusion matrices computed for the DNN on a representative image data set. We also show how to leverage local, DNN-specific analyses as run-time guards to increase the safety of the overall system. Our findings are applicable to other autonomous systems that use complex DNNs for perception.
Discrete-Event Controller Synthesis for Autonomous Systems with Deep-Learning Perception Components
Feb 07, 2022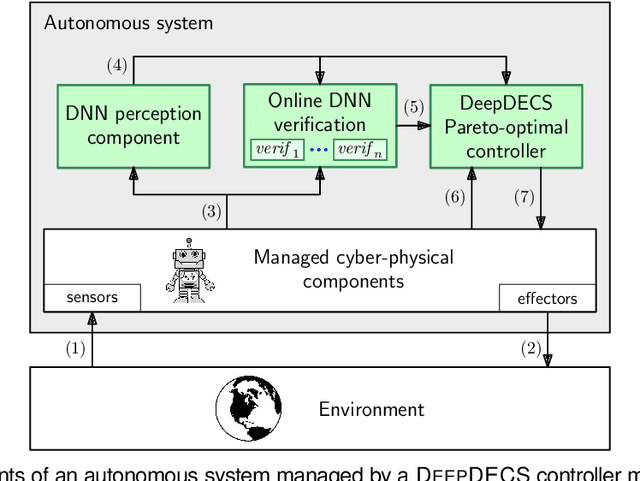
We present DEEPDECS, a new method for the synthesis of correct-by-construction discrete-event controllers for autonomous systems that use deep neural network (DNN) classifiers for the perception step of their decision-making processes. Despite major advances in deep learning in recent years, providing safety guarantees for these systems remains very challenging. Our controller synthesis method addresses this challenge by integrating DNN verification with the synthesis of verified Markov models. The synthesised models correspond to discrete-event controllers guaranteed to satisfy the safety, dependability and performance requirements of the autonomous system, and to be Pareto optimal with respect to a set of optimisation criteria. We use the method in simulation to synthesise controllers for mobile-robot collision avoidance, and for maintaining driver attentiveness in shared-control autonomous driving.