 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConcept-Based Abductive and Contrastive Explanations for Behaviors of Vision Models
May 07, 2026*Concept-based explanations* offer a promising approach for explaining the predictions of deep neural networks in terms of high-level, human-understandable concepts. However, existing methods either do not establish a causal connection between the concepts and model predictions or are limited in expressivity and only able to infer causal explanations involving single concepts. At the same time, the parallel line of work on *formal abductive and contrastive explanations* computes the minimal set of input features causally relevant for model outcomes but only considers low-level features such as pixels. Merging these two threads, in this work, we propose the notion of *concept-based abductive and contrastive explanations* that capture the minimal sets of high-level concepts causally relevant for model outcomes. We then present a family of algorithms that enumerate all minimal explanations while using *concept erasure* procedures to establish causal relationships. By appropriately aggregating such explanations, we are not only able to understand model predictions on individual images but also on collections of images where the model exhibits a user-specified, common *behavior*. We evaluate our approach on multiple models, datasets, and behaviors, and demonstrate its effectiveness in computing helpful, user-friendly explanations.
Discrete-Event Controller Synthesis for Autonomous Systems with Deep-Learning Perception Components
Feb 07, 2022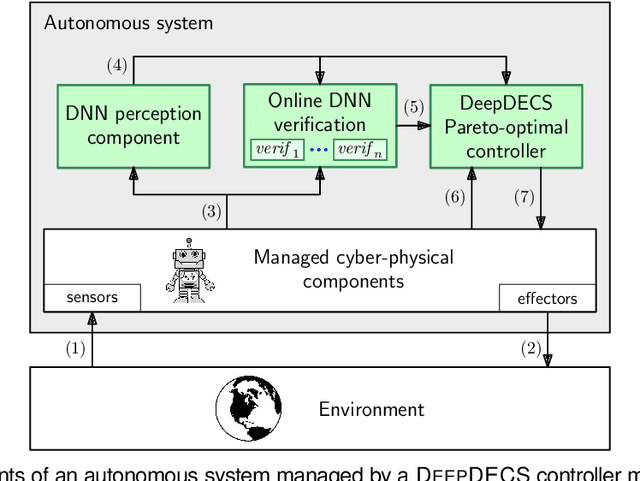
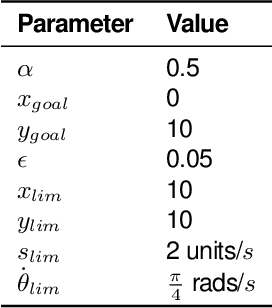
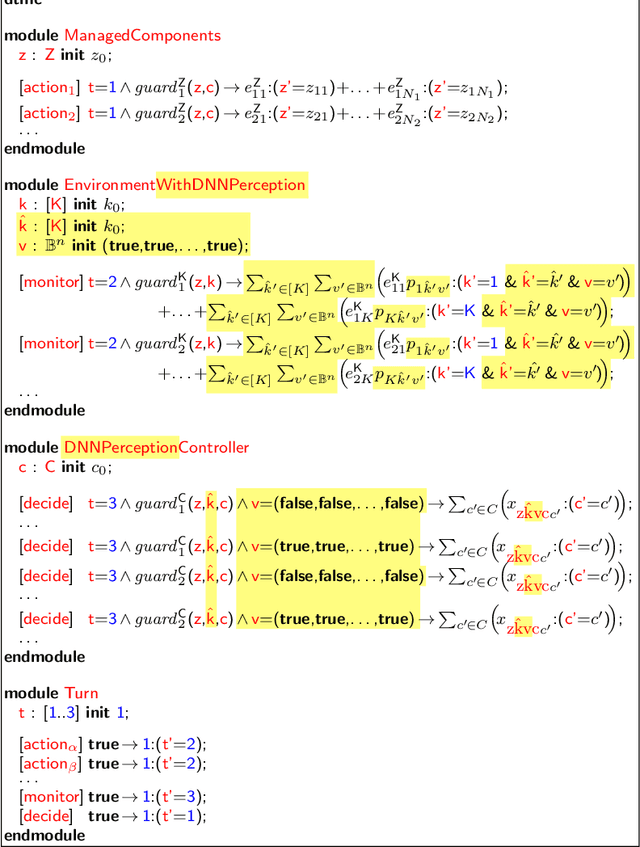
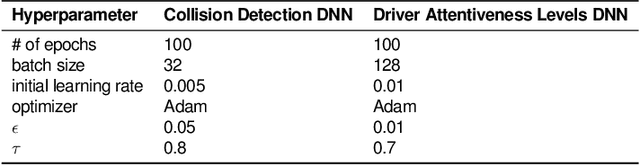
We present DEEPDECS, a new method for the synthesis of correct-by-construction discrete-event controllers for autonomous systems that use deep neural network (DNN) classifiers for the perception step of their decision-making processes. Despite major advances in deep learning in recent years, providing safety guarantees for these systems remains very challenging. Our controller synthesis method addresses this challenge by integrating DNN verification with the synthesis of verified Markov models. The synthesised models correspond to discrete-event controllers guaranteed to satisfy the safety, dependability and performance requirements of the autonomous system, and to be Pareto optimal with respect to a set of optimisation criteria. We use the method in simulation to synthesise controllers for mobile-robot collision avoidance, and for maintaining driver attentiveness in shared-control autonomous driving.
Self-Repairing Neural Networks: Provable Safety for Deep Networks via Dynamic Repair
Jul 23, 2021
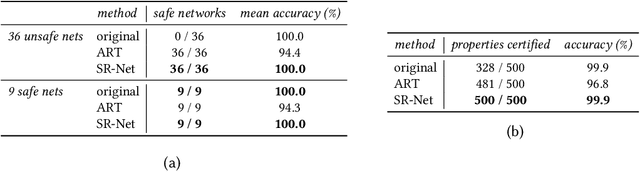

Neural networks are increasingly being deployed in contexts where safety is a critical concern. In this work, we propose a way to construct neural network classifiers that dynamically repair violations of non-relational safety constraints called safe ordering properties. Safe ordering properties relate requirements on the ordering of a network's output indices to conditions on their input, and are sufficient to express most useful notions of non-relational safety for classifiers. Our approach is based on a novel self-repairing layer, which provably yields safe outputs regardless of the characteristics of its input. We compose this layer with an existing network to construct a self-repairing network (SR-Net), and show that in addition to providing safe outputs, the SR-Net is guaranteed to preserve the accuracy of the original network. Notably, our approach is independent of the size and architecture of the network being repaired, depending only on the specified property and the dimension of the network's output; thus it is scalable to large state-of-the-art networks. We show that our approach can be implemented using vectorized computations that execute efficiently on a GPU, introducing run-time overhead of less than one millisecond on current hardware -- even on large, widely-used networks containing hundreds of thousands of neurons and millions of parameters.
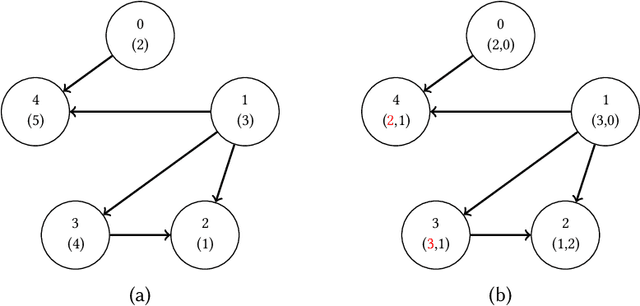
On using distributed representations of source code for the detection of C security vulnerabilities
Jun 01, 2021
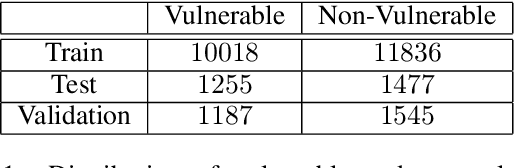
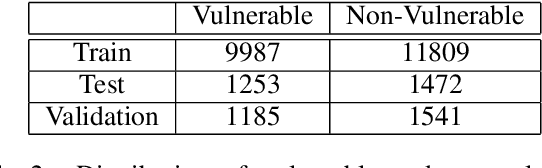
This paper presents an evaluation of the code representation model Code2vec when trained on the task of detecting security vulnerabilities in C source code. We leverage the open-source library astminer to extract path-contexts from the abstract syntax trees of a corpus of labeled C functions. Code2vec is trained on the resulting path-contexts with the task of classifying a function as vulnerable or non-vulnerable. Using the CodeXGLUE benchmark, we show that the accuracy of Code2vec for this task is comparable to simple transformer-based methods such as pre-trained RoBERTa, and outperforms more naive NLP-based methods. We achieved an accuracy of 61.43% while maintaining low computational requirements relative to larger models.
Fast Geometric Projections for Local Robustness Certification
Feb 12, 2020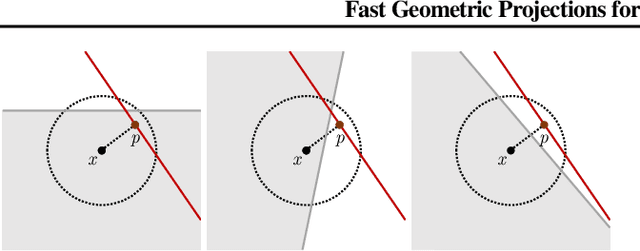
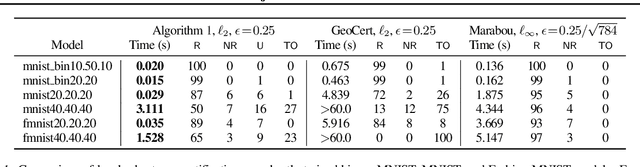
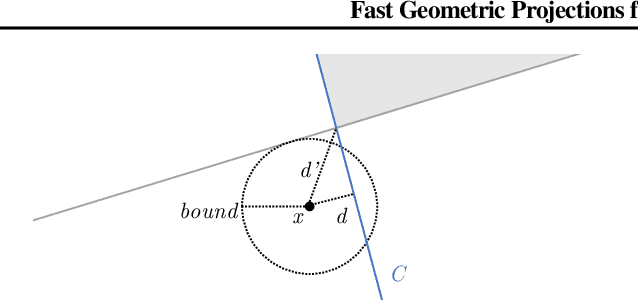
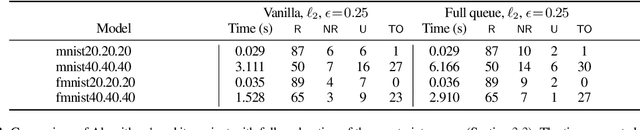
Local robustness ensures that a model classifies all inputs within an $\epsilon$-ball consistently, which precludes various forms of adversarial inputs. In this paper, we present a fast procedure for checking local robustness in feed-forward neural networks with piecewise linear activation functions. The key insight is that such networks partition the input space into a polyhedral complex such that the network is linear inside each polyhedral region; hence, a systematic search for decision boundaries within the regions around a given input is sufficient for assessing robustness. Crucially, we show how these regions can be analyzed using geometric projections instead of expensive constraint solving, thus admitting an efficient, highly-parallel GPU implementation at the price of incompleteness, which can be addressed by falling back on prior approaches. Empirically, we find that incompleteness is not often an issue, and that our method performs one to two orders of magnitude faster than existing robustness-certification techniques based on constraint solving.