 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline CS-based SAR Edge-Mapping
Apr 21, 2026With modern defense applications increasingly relying on inexpensive, small Unmanned Aerial Vehicles (UAVs), a major challenge lies in designing intelligent and computationally efficient onboard Automatic Target Recognition (ATR) algorithms to carry out operational objectives. This is especially critical in Synthetic Aperture Radar (SAR), where processing techniques such as ATR are often carried out post data collection, requiring onboard systems to bear the memory burden of storing the back-scattered signals. To alleviate this high cost, we propose an online, direct, edge-mapping technique which bypasses the image reconstruction step to classify scenes and targets. Furthermore, by reconstructing the scene as an edge-map we inherently promote sparsity, requiring fewer measurements and computational power than classic SAR reconstruction algorithms such as backprojection.
Online Sparse Synthetic Aperture Radar Imaging
Mar 09, 2026With modern defense applications increasingly relying on inexpensive, autonomous drones, lies the major challenge of designing computationally and memory-efficient onboard algorithms to fulfill mission objectives. This challenge is particularly significant in Synthetic Aperture Radar (SAR), where large volumes of data must be collected and processed for downstream tasks. We propose an online reconstruction method, the Online Fast Iterative Shrinkage-Thresholding Algorithm (Online FISTA), which incrementally reconstructs a scene with limited data through sparse coding. Rather than requiring storage of all received signal data, the algorithm recursively updates storage matrices for each iteration, greatly reducing memory demands. Online SAR image reconstruction facilitates more complex downstream tasks, such as Automatic Target Recognition (ATR), in an online manner, resulting in a more versatile and integrated framework compared to existing post-collection reconstruction and ATR approaches.
Analyzing Neural Network Information Flow Using Differential Geometry
Jan 22, 2026This paper provides a fresh view of the neural network (NN) data flow problem, i.e., identifying the NN connections that are most important for the performance of the full model, through the lens of graph theory. Understanding the NN data flow provides a tool for symbolic NN analysis, e.g.,~robustness analysis or model repair. Unlike the standard approach to NN data flow analysis, which is based on information theory, we employ the notion of graph curvature, specifically Ollivier-Ricci curvature (ORC). The ORC has been successfully used to identify important graph edges in various domains such as road traffic analysis, biological and social networks. In particular, edges with negative ORC are considered bottlenecks and as such are critical to the graph's overall connectivity, whereas positive-ORC edges are not essential. We use this intuition for the case of NNs as well: we 1)~construct a graph induced by the NN structure and introduce the notion of neural curvature (NC) based on the ORC; 2)~calculate curvatures based on activation patterns for a set of input examples; 3)~aim to demonstrate that NC can indeed be used to rank edges according to their importance for the overall NN functionality. We evaluate our method through pruning experiments and show that removing negative-ORC edges quickly degrades the overall NN performance, whereas positive-ORC edges have little impact. The proposed method is evaluated on a variety of models trained on three image datasets, namely MNIST, CIFAR-10 and CIFAR-100. The results indicate that our method can identify a larger number of unimportant edges as compared to state-of-the-art pruning methods.
Analyzing Neural Network Robustness Using Graph Curvature
Oct 25, 2024



This paper presents a new look at the neural network (NN) robustness problem, from the point of view of graph theory analysis, specifically graph curvature. Graph curvature (e.g., Ricci curvature) has been used to analyze system dynamics and identify bottlenecks in many domains, including road traffic analysis and internet routing. We define the notion of neural Ricci curvature and use it to identify bottleneck NN edges that are heavily used to ``transport data" to the NN outputs. We provide an evaluation on MNIST that illustrates that such edges indeed occur more frequently for inputs where NNs are less robust. These results will serve as the basis for an alternative method of robust training, by minimizing the number of bottleneck edges.
Data-Driven Modeling and Verification of Perception-Based Autonomous Systems
Dec 11, 2023



This paper addresses the problem of data-driven modeling and verification of perception-based autonomous systems. We assume the perception model can be decomposed into a canonical model (obtained from first principles or a simulator) and a noise model that contains the measurement noise introduced by the real environment. We focus on two types of noise, benign and adversarial noise, and develop a data-driven model for each type using generative models and classifiers, respectively. We show that the trained models perform well according to a variety of evaluation metrics based on downstream tasks such as state estimation and control. Finally, we verify the safety of two systems with high-dimensional data-driven models, namely an image-based version of mountain car (a reinforcement learning benchmark) as well as the F1/10 car, which uses LiDAR measurements to navigate a racing track.
Imprecise Bayesian Neural Networks
Feb 19, 2023



Uncertainty quantification and robustness to distribution shifts are important goals in machine learning and artificial intelligence. Although Bayesian neural networks (BNNs) allow for uncertainty in the predictions to be assessed, different sources of uncertainty are indistinguishable. We present imprecise Bayesian neural networks (IBNNs); they generalize and overcome some of the drawbacks of standard BNNs. These latter are trained using a single prior and likelihood distributions, whereas IBNNs are trained using credal prior and likelihood sets. They allow to distinguish between aleatoric and epistemic uncertainties, and to quantify them. In addition, IBNNs are robust in the sense of Bayesian sensitivity analysis, and are more robust than BNNs to distribution shift. They can also be used to compute sets of outcomes that enjoy PAC-like properties. We apply IBNNs to two case studies. One, to model blood glucose and insulin dynamics for artificial pancreas control, and two, for motion prediction in autonomous driving scenarios. We show that IBNNs performs better when compared to an ensemble of BNNs benchmark.
Confidence Composition for Monitors of Verification Assumptions
Nov 03, 2021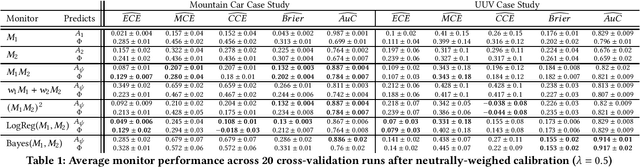
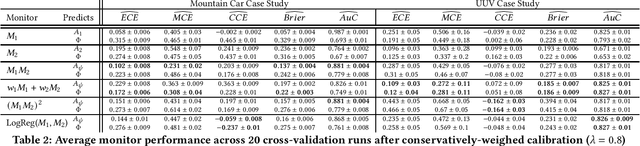
Closed-loop verification of cyber-physical systems with neural network controllers offers strong safety guarantees under certain assumptions. It is, however, difficult to determine whether these guarantees apply at run time because verification assumptions may be violated. To predict safety violations in a verified system, we propose a three-step framework for monitoring the confidence in verification assumptions. First, we represent the sufficient condition for verified safety with a propositional logical formula over assumptions. Second, we build calibrated confidence monitors that evaluate the probability that each assumption holds. Third, we obtain the confidence in the verification guarantees by composing the assumption monitors using a composition function suitable for the logical formula. Our framework provides theoretical bounds on the calibration and conservatism of compositional monitors. In two case studies, we demonstrate that the composed monitors improve over their constituents and successfully predict safety violations.
ModelGuard: Runtime Validation of Lipschitz-continuous Models
Apr 30, 2021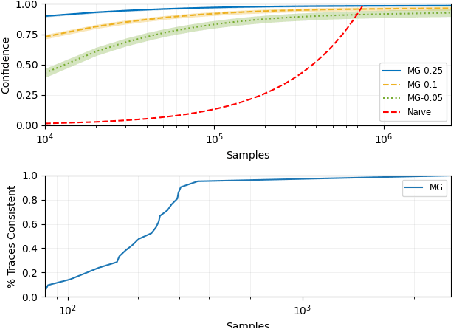
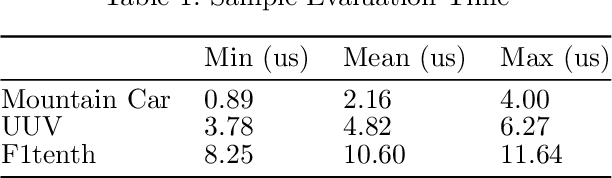
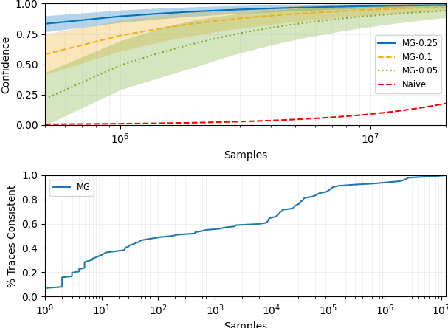
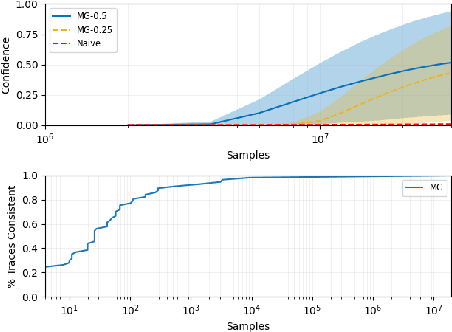
This paper presents ModelGuard, a sampling-based approach to runtime model validation for Lipschitz-continuous models. Although techniques exist for the validation of many classes of models the majority of these methods cannot be applied to the whole of Lipschitz-continuous models, which includes neural network models. Additionally, existing techniques generally consider only white-box models. By taking a sampling-based approach, we can address black-box models, represented only by an input-output relationship and a Lipschitz constant. We show that by randomly sampling from a parameter space and evaluating the model, it is possible to guarantee the correctness of traces labeled consistent and provide a confidence on the correctness of traces labeled inconsistent. We evaluate the applicability and scalability of ModelGuard in three case studies, including a physical platform.
Confidence Calibration with Bounded Error Using Transformations
Feb 25, 2021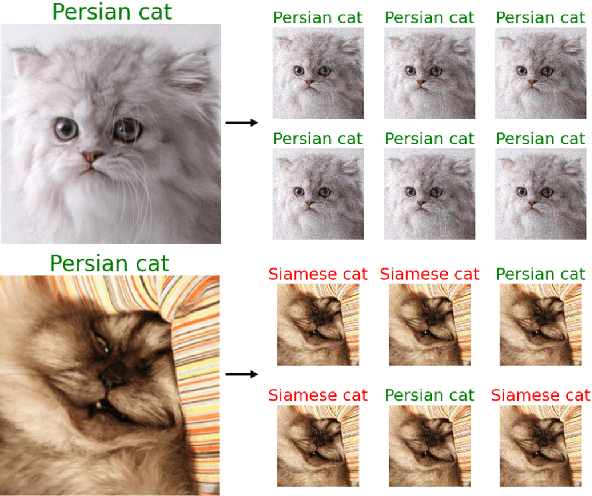
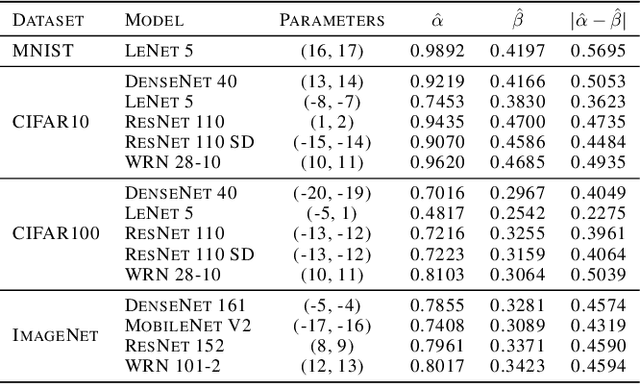

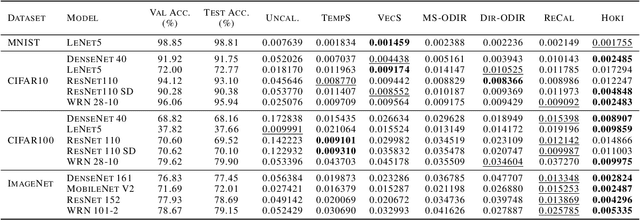
As machine learning techniques become widely adopted in new domains, especially in safety-critical systems such as autonomous vehicles, it is crucial to provide accurate output uncertainty estimation. As a result, many approaches have been proposed to calibrate neural networks to accurately estimate the likelihood of misclassification. However, while these methods achieve low expected calibration error (ECE), few techniques provide theoretical performance guarantees on the calibration error (CE). In this paper, we introduce Hoki, a novel calibration algorithm with a theoretical bound on the CE. Hoki works by transforming the neural network logits and/or inputs and recursively performing calibration leveraging the information from the corresponding change in the output. We provide a PAC-like bounds on CE that is shown to decrease with the number of samples used for calibration, and increase proportionally with ECE and the number of discrete bins used to calculate ECE. We perform experiments on multiple datasets, including ImageNet, and show that the proposed approach generally outperforms state-of-the-art calibration algorithms across multiple datasets and models - providing nearly an order or magnitude improvement in ECE on ImageNet. In addition, Hoki is fast algorithm which is comparable to temperature scaling in terms of learning time.
VisionGuard: Runtime Detection of Adversarial Inputs to Perception Systems
Feb 23, 2020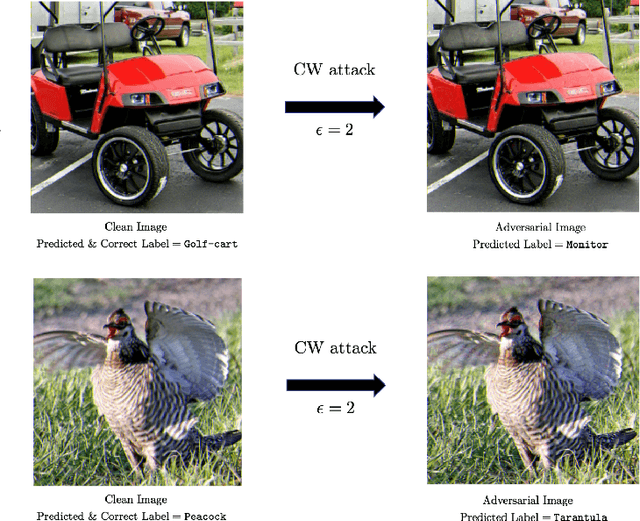
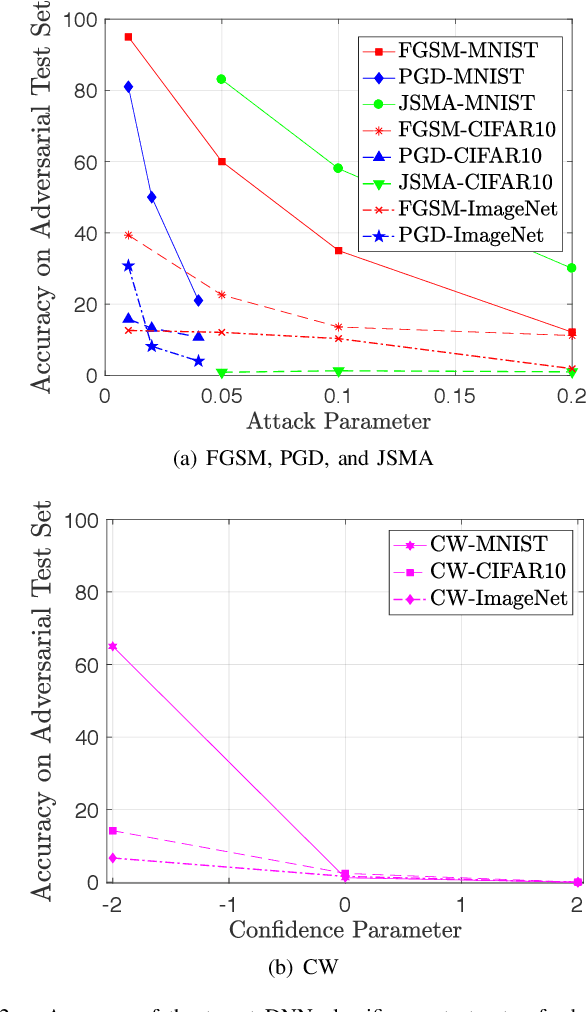
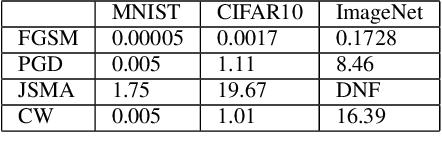
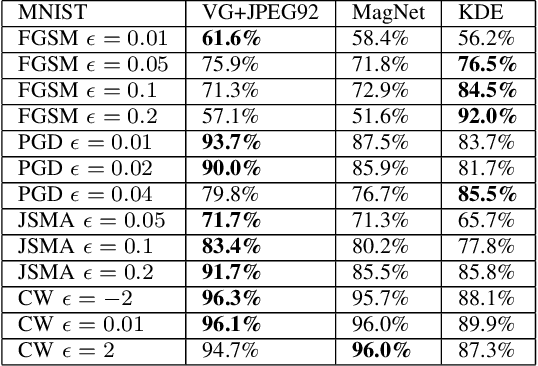
Deep neural network (DNN) models have proven to be vulnerable to adversarial attacks. In this paper, we propose VisionGuard, a novel attack- and dataset-agnostic and computationally-light defense mechanism for adversarial inputs to DNN-based perception systems. In particular, VisionGuard relies on the observation that adversarial images are sensitive to lossy compression transformations. Specifically, to determine if an image is adversarial, VisionGuard checks if the output of the target classifier on a given input image changes significantly after feeding it a transformed version of the image under investigation. Moreover, we show that VisionGuard is computationally-light both at runtime and design-time which makes it suitable for real-time applications that may also involve large-scale image domains. To highlight this, we demonstrate the efficiency of VisionGuard on ImageNet, a task that is computationally challenging for the majority of relevant defenses. Finally, we include extensive comparative experiments on the MNIST, CIFAR10, and ImageNet datasets that show that VisionGuard outperforms existing defenses in terms of scalability and detection performance.