 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of INDI and NDI with Nonlinear Disturbance Observer for Aerial Robotics
May 07, 2026This work presents a simulation-based comparative robustness analysis of Incremental Nonlinear Dynamic Inversion (INDI) and Nonlinear Dynamic Inversion augmented with a nonlinear disturbance observer (NDI+NDO) for fully actuated aerial robots. A systematic simulation campaign across representative operating scenarios is conducted, where we compare tracking performance, robustness, control effort, under parametric variations, external disturbances, and measurement noise. Results show that INDI demonstrates stronger robustness in several model-mismatch and combined-stress cases, while NDI+NDO primarily matches nominal performance but exhibits greater sensitivity under several non-ideal conditions. These findings provide practical guidance on the relative strengths and limitations of incremental and observer-based inversion strategies for aerial robotic applications.
Synchronous Observer Design for Landmark-Inertial SLAM with Magnetometer and Intermittent GNSS Measurements
Apr 06, 2026In Landmark-Inertial Simultaneous Localisation and Mapping (LI-SLAM), the positions of landmarks in the environment and the robot's pose relative to these landmarks are estimated using landmark position measurements, and measurements from the Inertial Measurement Unit (IMU). However, the robot and landmark positions in the inertial frame, and the yaw of the robot, are not observable in LI-SLAM. This paper proposes a nonlinear observer for LI-SLAM that overcomes the observability constraints with the addition of intermittent GNSS position and magnetometer measurements. The full-state error dynamics of the proposed observer is shown to be both almost-globally asymptotically stable and locally exponentially stable, and this is validated using simulations.
Equivariant Filter Design for Range-only SLAM
Mar 05, 2025



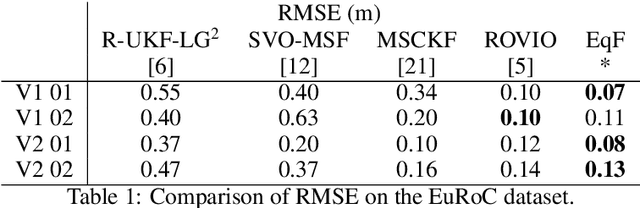
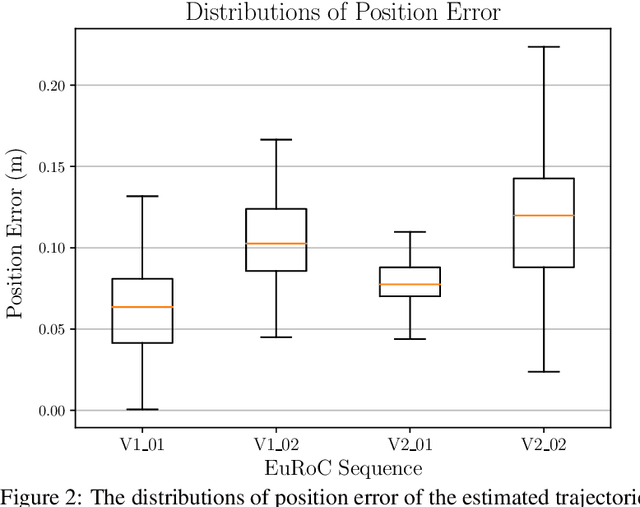
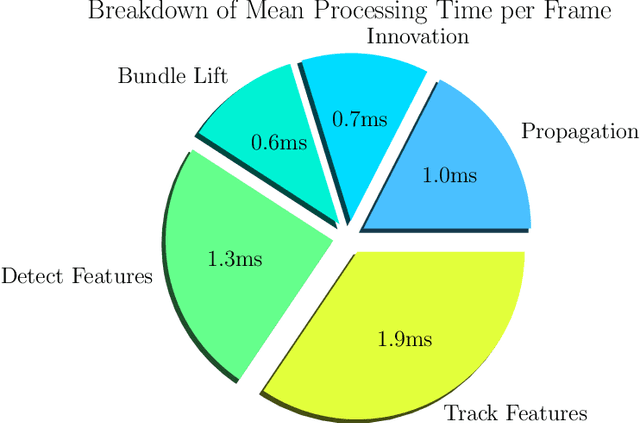
Range-only Simultaneous Localisation and Mapping (RO-SLAM) is of interest due to its practical applications in ultra-wideband (UWB) and Bluetooth Low Energy (BLE) localisation in terrestrial and aerial applications and acoustic beacon localisation in submarine applications. In this work, we consider a mobile robot equipped with an inertial measurement unit (IMU) and a range sensor that measures distances to a collection of fixed landmarks. We derive an equivariant filter (EqF) for the RO-SLAM problem based on a symmetry Lie group that is compatible with the range measurements. The proposed filter does not require bootstrapping or initialisation of landmark positions, and demonstrates robustness to the no-prior situation. The filter is demonstrated on a real-world dataset, and it is shown to significantly outperform a state-of-the-art EKF alternative in terms of both accuracy and robustness.
Unified Feedback Linearization for Nonlinear Systems with Dexterous and Energy-Saving Modes
Feb 27, 2025



Systems with a high number of inputs compared to the degrees of freedom (e.g. a mobile robot with Mecanum wheels) often have a minimal set of energy-efficient inputs needed to achieve a main task (e.g. position tracking) and a set of energy-intense inputs needed to achieve an additional auxiliary task (e.g. orientation tracking). This letter presents a unified control scheme, derived through feedback linearization, that can switch between two modes: an energy-saving mode, which tracks the main task using only the energy-efficient inputs while forcing the energy-intense inputs to zero, and a dexterous mode, which also uses the energy-intense inputs to track the auxiliary task as needed. The proposed control guarantees the exponential tracking of the main task and that the dynamics associated with the main task evolve independently of the a priori unknown switching signal. When the control is operating in dexterous mode, the exponential tracking of the auxiliary task is also guaranteed. Numerical simulations on an omnidirectional Mecanum wheel robot validate the effectiveness of the proposed approach and demonstrate the effect of the switching signal on the exponential tracking behavior of the main and auxiliary tasks.
MSCEqF: A Multi State Constraint Equivariant Filter for Vision-aided Inertial Navigation
Nov 20, 2023



This letter re-visits the problem of visual-inertial navigation system (VINS) and presents a novel filter design we dub the multi state constraint equivariant filter (MSCEqF, in analogy to the well known MSCKF). We define a symmetry group and corresponding group action that allow specifically the design of an equivariant filter for the problem of visual-inertial odometry (VIO) including IMU bias, and camera intrinsic and extrinsic calibration states. In contrast to state-of-the-art invariant extended Kalman filter (IEKF) approaches that simply tack IMU bias and other states onto the $\mathbf{SE}_2(3)$ group, our filter builds upon a symmetry that properly includes all the states in the group structure. Thus, we achieve improved behavior, particularly when linearization points largely deviate from the truth (i.e., on transients upon state disturbances). Our approach is inherently consistent even during convergence phases from significant errors without the need for error uncertainty adaptation, observability constraint, or other consistency enforcing techniques. This leads to greatly improved estimator behavior for significant error and unexpected state changes during, e.g., long-duration missions. We evaluate our approach with a multitude of different experiments using three different prominent real-world datasets.
Equivariant Symmetries for Inertial Navigation Systems
Sep 07, 2023



This paper investigates the problem of inertial navigation system (INS) filter design through the lens of symmetry. The extended Kalman filter (EKF) and its variants, have been the staple of INS filtering for 50 years; however, recent advances in inertial navigation systems have exploited matrix Lie group structure to design stochastic filters and state observers that have been shown to display superior performance compared to classical solutions. In this work we consider the case where a vehicle has an inertial measurement unit (IMU) and a global navigation satellite system (GNSS) receiver. We show that all the modern variants of the EKF for these sensors can be interpreted as the recently proposed Equivariant Filter (EqF) design methodology applied to different choices of symmetry group for the INS problem. This leads us to propose two new symmetries for the INS problem that have not been considered in the prior literature, and provide a discussion of the relative strengths and weaknesses of all the different algorithms. We believe the collection of symmetries that we present here capture all the sensible choices of symmetry for this problem and sensor suite, and that the analysis provided is indicative of the relative real-world performance potential of the different algorithms.
Event Blob Tracking: An Asynchronous Real-Time Algorithm
Jul 20, 2023Event-based cameras have become increasingly popular for tracking fast-moving objects due to their high temporal resolution, low latency, and high dynamic range. In this paper, we propose a novel algorithm for tracking event blobs using raw events asynchronously in real time. We introduce the concept of an event blob as a spatio-temporal likelihood of event occurrence where the conditional spatial likelihood is blob-like. Many real-world objects generate event blob data, for example, flickering LEDs such as car headlights or any small foreground object moving against a static or slowly varying background. The proposed algorithm uses a nearest neighbour classifier with a dynamic threshold criteria for data association coupled with a Kalman filter to track the event blob state. Our algorithm achieves highly accurate tracking and event blob shape estimation even under challenging lighting conditions and high-speed motions. The microsecond time resolution achieved means that the filter output can be used to derive secondary information such as time-to-contact or range estimation, that will enable applications to real-world problems such as collision avoidance in autonomous driving.
Exploiting Different Symmetries for Trajectory Tracking Control with Application to Quadrotors
Jul 16, 2022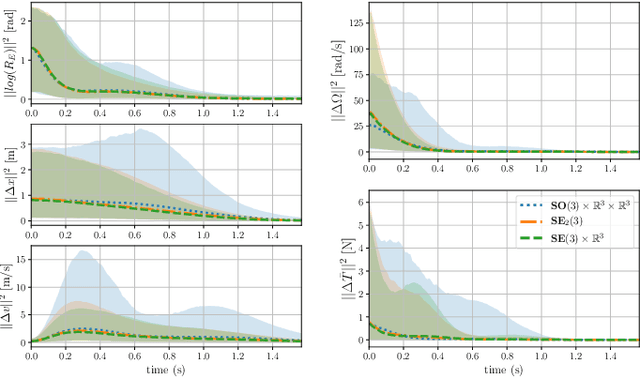
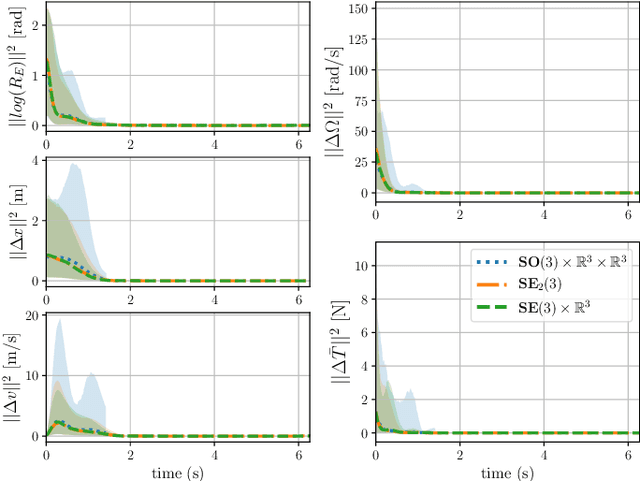
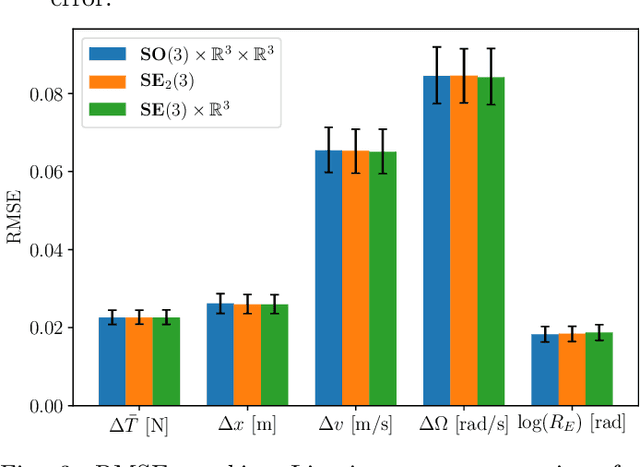
High performance trajectory tracking control of quadrotor vehicles is an important challenge in aerial robotics. Symmetry is a fundamental property of physical systems and offers the potential to provide a tool to design high-performance control algorithms. We propose a design methodology that takes any given symmetry, linearises the associated error in a single set of coordinates, and uses LQR design to obtain a high performance control; an approach we term Equivariant Regulator design. We show that quadrotor vehicles admit several different symmetries: the direct product symmetry, the extended pose symmetry and the pose and velocity symmetry, and show that each symmetry can be used to define a global error. We compare the linearised systems via simulation and find that the extended pose and pose and velocity symmetries outperform the direct product symmetry in the presence of large disturbances. This suggests that choices of equivariant and group affine symmetries have improved linearisation error.
EqVIO: An Equivariant Filter for Visual Inertial Odometry
May 04, 2022
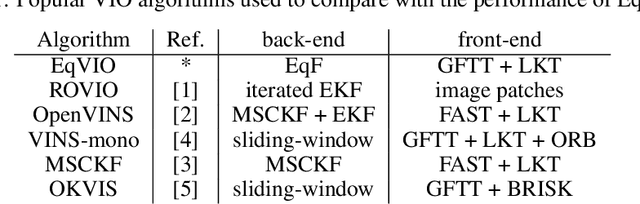
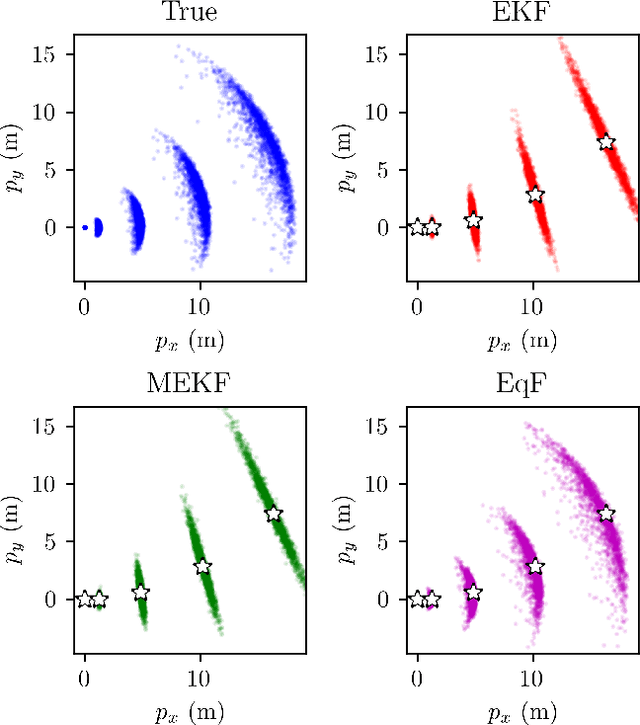
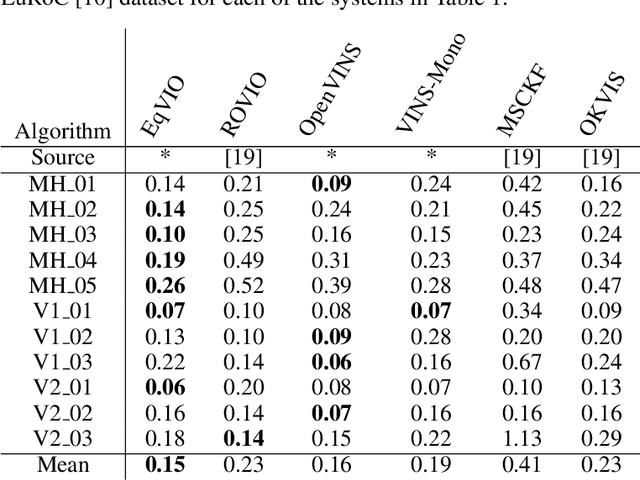
Visual Inertial Odometry (VIO) is the problem of estimating a robot's trajectory by combining information from an inertial measurement unit (IMU) and a camera, and is of great interest to the robotics community. This paper develops a novel Lie group symmetry for the VIO problem and applies the recently proposed equivariant filter. The symmetry is shown to be compatible with the invariance of the VIO reference frame, lead to exact linearisation of bias-free IMU dynamics, and provide equivariance of the visual measurement function. As a result, the equivariant filter (EqF) based on this Lie group is a consistent estimator for VIO with lower linearisation error in the propagation of state dynamics and a higher order equivariant output approximation than standard formulations. Experimental results on the popular EuRoC and UZH-FPV datasets demonstrate that the proposed system outperforms other state-of-the-art VIO algorithms in terms of both speed and accuracy.
An Equivariant Filter for Visual Inertial Odometry
Apr 08, 2021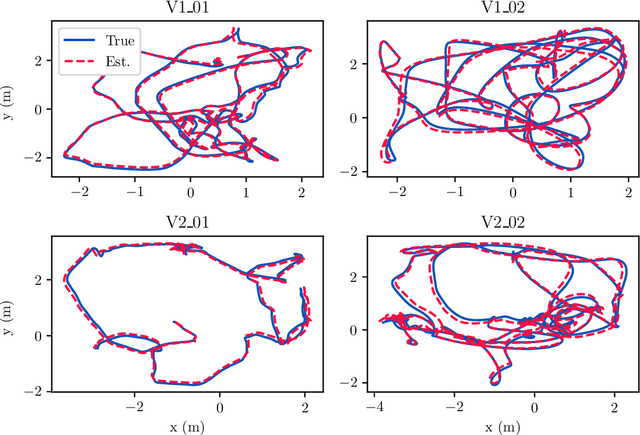
Visual Inertial Odometry (VIO) is of great interest due the ubiquity of devices equipped with both a monocular camera and Inertial Measurement Unit (IMU). Methods based on the extended Kalman Filter remain popular in VIO due to their low memory requirements, CPU usage, and processing time when compared to optimisation-based methods. In this paper, we analyse the VIO problem from a geometric perspective and propose a novel formulation on a smooth quotient manifold where the equivalence relationship is the well-known invariance of VIO to choice of reference frame. We propose a novel Lie group that acts transitively on this manifold and is compatible with the visual measurements. This structure allows for the application of Equivariant Filter (EqF) design leading to a novel filter for the VIO problem. Combined with a very simple vision processing front-end, the proposed filter demonstrates state-of-the-art performance on the EuRoC dataset compared to other EKF-based VIO algorithms.