 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSee, Learn, Assist: Safe and Self-Paced Robotic Rehabilitation via Video-Based Learning from Demonstration
Mar 15, 2026In this paper, we propose a novel framework that allows therapists to teach robot-assisted rehabilitation exercises remotely via RGB-D video. Our system encodes demonstrations as 6-DoF body-centric trajectories using Cartesian Dynamic Movement Primitives (DMPs), ensuring accurate posture-independent spatial generalization across diverse patient anatomies. Crucially, we execute these trajectories through a decoupled hybrid control architecture that constructs a spatially compliant virtual tunnel, paired with an effort-based temporal dilation mechanism. This architecture is applied to three distinct rehabilitation modalities: Passive, Active-Assisted, and Active-Resistive, by dynamically linking the exercise's execution phase to the patient's tangential force contribution. To guarantee safety, a Gaussian Mixture Regression (GMR) model is learned on-the-fly from the patient's own limb. This allows the detection of abnormal interaction forces and, if necessary, reverses the trajectory to prevent injury. Experimental validation demonstrates the system's precision, achieving an average trajectory reproduction error of 3.7cm and a range of motion (ROM) error of 5.5 degrees. Furthermore, dynamic interaction trials confirm that the controller successfully enforces effort-based progression while maintaining strict spatial path adherence against human disturbances.
Collaborating for Success: Optimizing System Efficiency and Resilience Under Agile Industrial Settings
Sep 12, 2024



Designing an efficient and resilient human-robot collaboration strategy that not only upholds the safety and ergonomics of shared workspace but also enhances the performance and agility of collaborative setup presents significant challenges concerning environment perception and robot control. In this research, we introduce a novel approach for collaborative environment monitoring and robot motion regulation to address this multifaceted problem. Our study proposes novel computation and division of safety monitoring zones, adhering to ISO 13855 and TS 15066 standards, utilizing 2D lasers information. These zones are not only configured in the standard three-layer arrangement but are also expanded into two adjacent quadrants, thereby enhancing system uptime and preventing unnecessary deadlocks. Moreover, we also leverage 3D visual information to track dynamic human articulations and extended intrusions. Drawing upon the fused sensory data from 2D and 3D perceptual spaces, our proposed hierarchical controller stably regulates robot velocity, validated using Lasalle in-variance principle. Empirical evaluations demonstrate that our approach significantly reduces task execution time and system response delay, resulting in improved efficiency and resilience within collaborative settings.
CoBT: Collaborative Programming of Behaviour Trees from One Demonstration for Robot Manipulation
Apr 10, 2024
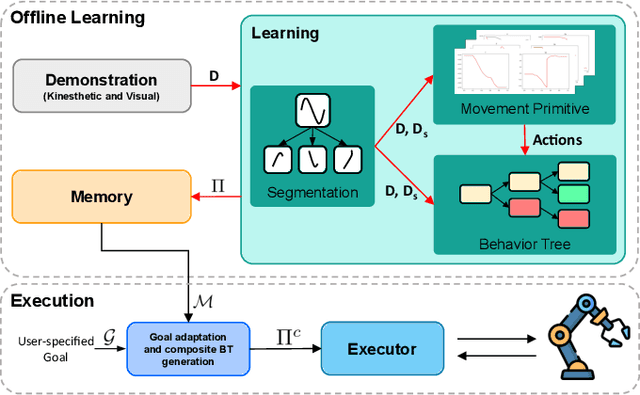


Mass customization and shorter manufacturing cycles are becoming more important among small and medium-sized companies. However, classical industrial robots struggle to cope with product variation and dynamic environments. In this paper, we present CoBT, a collaborative programming by demonstration framework for generating reactive and modular behavior trees. CoBT relies on a single demonstration and a combination of data-driven machine learning methods with logic-based declarative learning to learn a task, thus eliminating the need for programming expertise or long development times. The proposed framework is experimentally validated on 7 manipulation tasks and we show that CoBT achieves approx. 93% success rate overall with an average of 7.5s programming time. We conduct a pilot study with non-expert users to provide feedback regarding the usability of CoBT.
Contact-Implicit Planning and Control for Non-Prehensile Manipulation Using State-Triggered Constraints
Oct 18, 2022
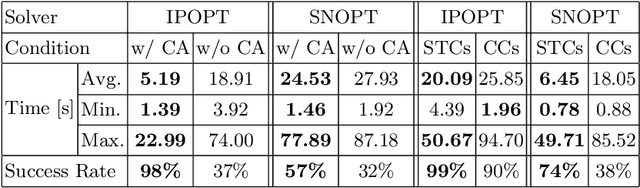
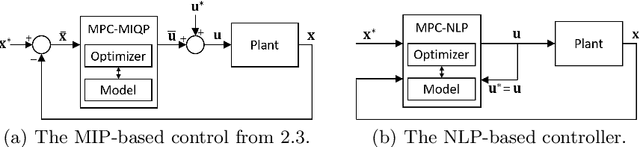
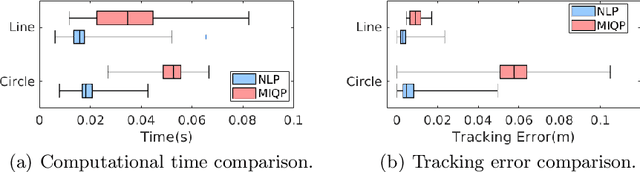
We present a contact-implicit planning approach that can generate contact-interaction trajectories for non-prehensile manipulation problems without tuning or a tailored initial guess and with high success rates. This is achieved by leveraging the concept of state-triggered constraints (STCs) to capture the hybrid dynamics induced by discrete contact modes without explicitly reasoning about the combinatorics. STCs enable triggering arbitrary constraints by a strict inequality condition in a continuous way. We first use STCs to develop an automatic contact constraint activation method to minimize the effective constraint space based on the utility of contact candidates for a given task. Then, we introduce a re-formulation of the Coulomb friction model based on STCs that is more efficient for the discovery of tangential forces than the well-studied complementarity constraints-based approach. Last, we include the proposed friction model in the planning and control of quasi-static planar pushing. The performance of the STC-based contact activation and friction methods is evaluated by extensive simulation experiments in a dynamic pushing scenario. The results demonstrate that our methods outperform the baselines based on complementarity constraints with a significant decrease in the planning time and a higher success rate. We then compare the proposed quasi-static pushing controller against a mixed-integer programming-based approach in simulation and find that our method is computationally more efficient and provides a better tracking accuracy, with the added benefit of not requiring an initial control trajectory. Finally, we present hardware experiments demonstrating the usability of our framework in executing complex trajectories in real-time even with a low-accuracy tracking system.
Tuning-Free Contact-Implicit Trajectory Optimization
Jun 11, 2020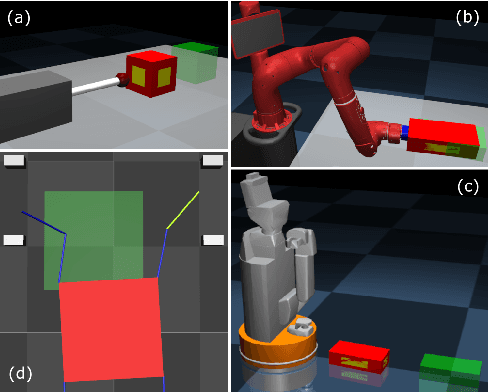
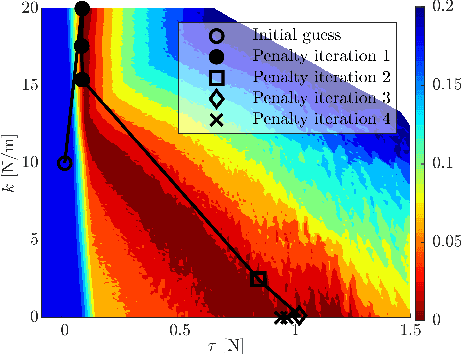
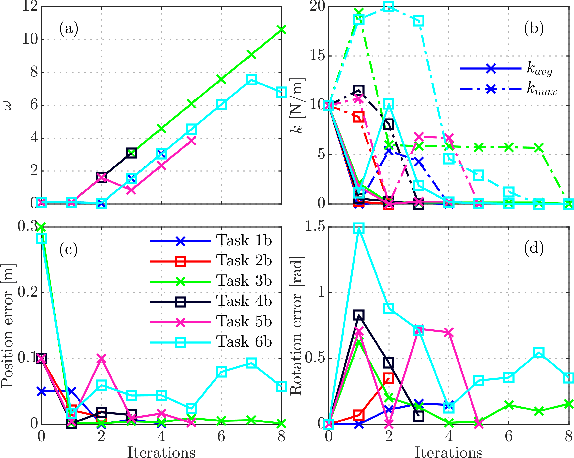
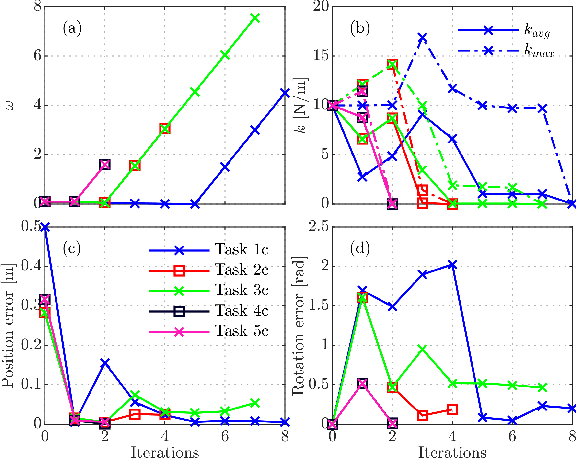
We present a contact-implicit trajectory optimization framework that can plan contact-interaction trajectories for different robot architectures and tasks using a trivial initial guess and without requiring any parameter tuning. This is achieved by using a relaxed contact model along with an automatic penalty adjustment loop for suppressing the relaxation. Moreover, the structure of the problem enables us to exploit the contact information implied by the use of relaxation in the previous iteration, such that the solution is explicitly improved with little computational overhead. We test the proposed approach in simulation experiments for non-prehensile manipulation using a 7-DOF arm and a mobile robot and for planar locomotion using a humanoid-like robot in zero gravity. The results demonstrate that our method provides an out-of-the-box solution with good performance for a wide range of applications.
Contact-Implicit Trajectory Optimization Based on a Variable Smooth Contact Model and Successive Convexification
Mar 04, 2019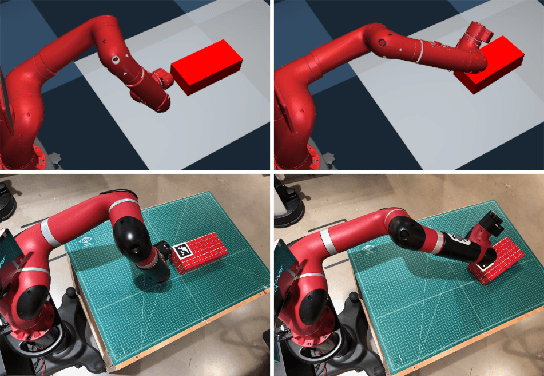
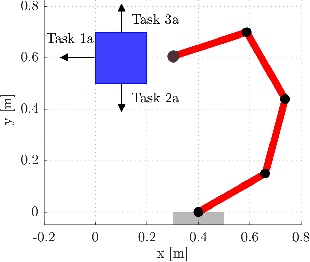
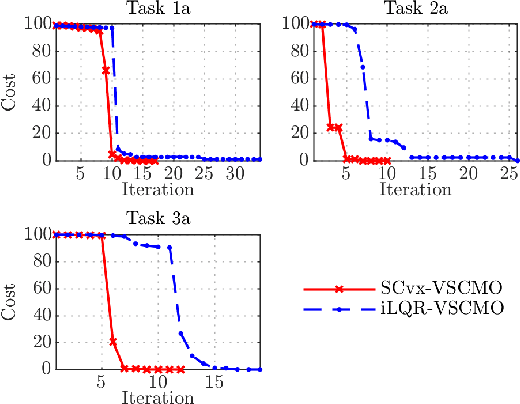
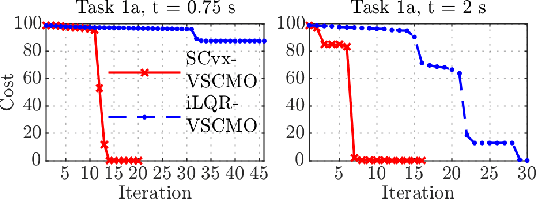
In this paper, we propose a contact-implicit trajectory optimization (CITO) method based on a variable smooth contact model (VSCM) and successive convexification (SCvx). The VSCM facilitates the convergence of gradient-based optimization without compromising physical fidelity. On the other hand, the proposed SCvx-based approach combines the advantages of direct and shooting methods for CITO. For evaluations, we consider non-prehensile manipulation tasks. The proposed method is compared to a version based on iterative linear quadratic regulator (iLQR) on a planar example. The results demonstrate that both methods can find physically-consistent motions that complete the tasks without a meaningful initial guess owing to the VSCM. The proposed SCvx-based method outperforms the iLQR-based method in terms of convergence, computation time, and the quality of motions found. Finally, the proposed SCvx-based method is tested on a standard robot platform and shown to perform efficiently for a real-world application.
A Comparative Analysis of Contact Models in Trajectory Optimization for Manipulation
Jul 30, 2018
In this paper, we analyze the effects of contact models on contact-implicit trajectory optimization for manipulation. We consider three different approaches: (1) a contact model that is based on complementarity constraints, (2) a smooth contact model, and our proposed method (3) a variable smooth contact model. We compare these models in simulation in terms of physical accuracy, quality of motions, and computation time. In each case, the optimization process is initialized by setting all torque variables to zero, namely, without a meaningful initial guess. For simulations, we consider a pushing task with varying complexity for a 7 degrees-of-freedom robot arm. Our results demonstrate that the optimization based on the proposed variable smooth contact model provides a good trade-off between the physical fidelity and quality of motions at the cost of increased computation time.
Integrating Risk in Humanoid Robot Control for Applications in the Nuclear Industry
Jul 12, 2018
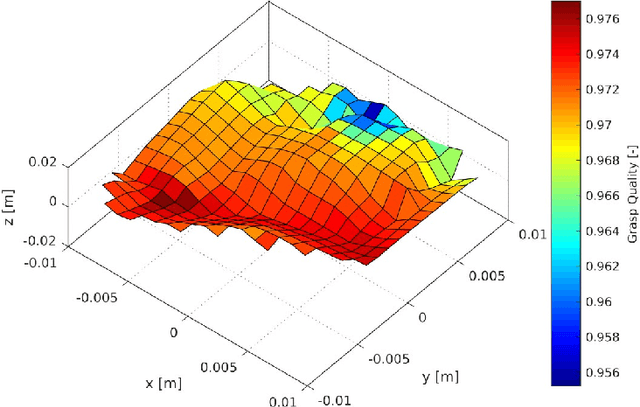
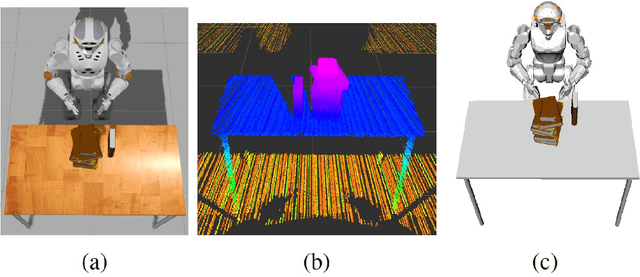
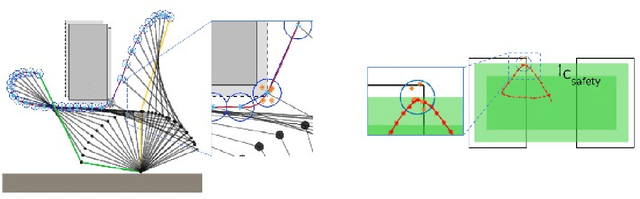
This paper discuss the integration of risk into a robot control framework for decommissioning applications in the nuclear industry. Our overall objective is to allow the robot to evaluate a risk associated with several methods of completing the same task by combining a set of action sequences. If the environment is known and in the absence of sensing errors each set of actions would successfully complete the task. In this paper, instead of attempting to model the errors associated with each sensing system in order to compute an exact solution, a set of solutions are obtained along with a prescribed risk index. The risk associated with each set of actions can then be compared to possible payoffs or rewards, for instance task completion time or power consumption. This information is then sent to a high level decision planner, for instance a human teleoperator, who can then make a more informed decision regarding the robots actions. In order to illustrate the concept, we introduce three specific risk measures, namely, the collision risk and the risk of toppling and failure risk associated with grasping an object. We demonstrate the results from this foundational study of risk-aware compositional robot autonomy in simulation using NASA's Valkyrie humanoid robot, and the grasping simulator HAPTIX.
* 9 pages, 6 figues
Using Contact to Increase Robot Performance for Glovebox D&D Tasks
Jul 11, 2018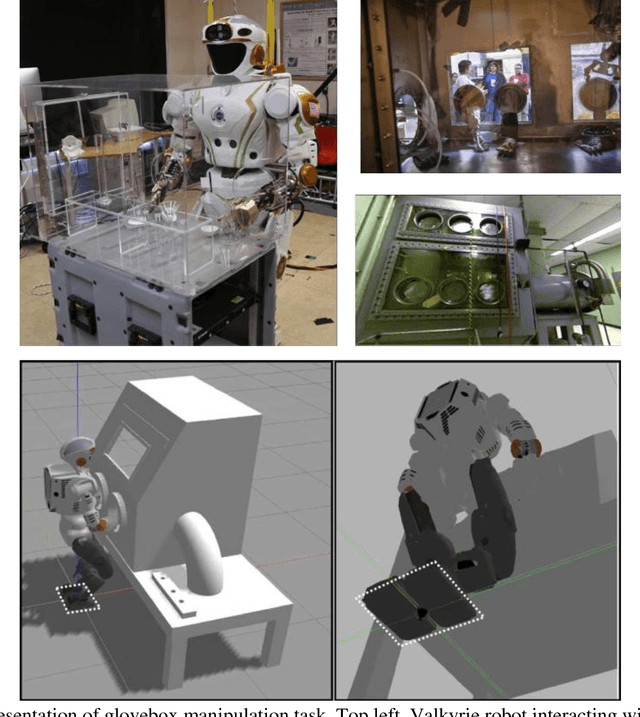
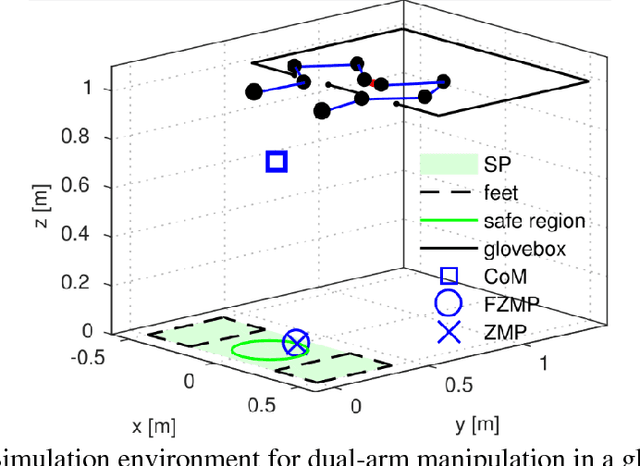
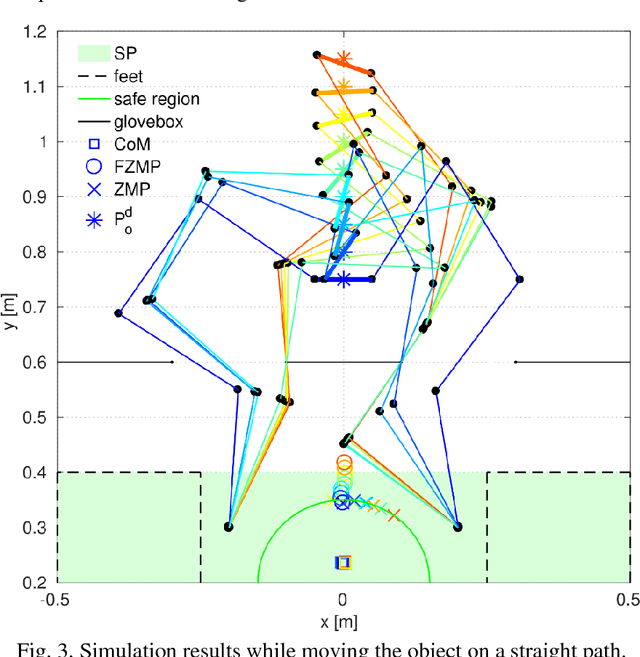
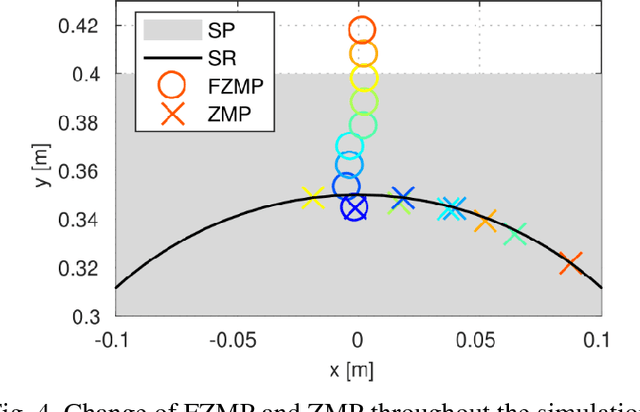
Glovebox decommissioning tasks usually require manipulating relatively heavy objects in a highly constrained environment. Thus, contact with the surroundings becomes inevitable. In order to allow the robot to interact with the environment in a natural way, we present a contact-implicit motion planning framework. This framework enables the system, without the specification in advance of a contact plan, to make and break contacts to maintain stability while performing a manipulation task. In this method, we use linear complementarity constraints to model rigid body contacts and find a locally optimal solution for joint displacements and magnitudes of support forces. Then, joint torques are calculated such that the support forces have the highest priority. We evaluate our framework in a 2.5D, quasi-static simulation in which a humanoid robot with planar arms manipulates a heavy object. Our results suggest that the proposed method provides the robot with the ability to balance itself by generating support forces on the environment while simultaneously performing the manipulation task.