 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Driven Deep Reinforcement Learning Framework for Cobots: A Sim2Real Approach
Jul 02, 2024



This study presents a novel methodology incorporating safety constraints into a robotic simulation during the training of deep reinforcement learning (DRL). The framework integrates specific parts of the safety requirements, such as velocity constraints, as specified by ISO 10218, directly within the DRL model that becomes a part of the robot's learning algorithm. The study then evaluated the efficiency of these safety constraints by subjecting the DRL model to various scenarios, including grasping tasks with and without obstacle avoidance. The validation process involved comprehensive simulation-based testing of the DRL model's responses to potential hazards and its compliance. Also, the performance of the system is carried out by the functional safety standards IEC 61508 to determine the safety integrity level. The study indicated a significant improvement in the safety performance of the robotic system. The proposed DRL model anticipates and mitigates hazards while maintaining operational efficiency. This study was validated in a testbed with a collaborative robotic arm with safety sensors and assessed with metrics such as the average number of safety violations, obstacle avoidance, and the number of successful grasps. The proposed approach outperforms the conventional method by a 16.5% average success rate on the tested scenarios in the simulations and 2.5% in the testbed without safety violations. The project repository is available at https://github.com/ammar-n-abbas/sim2real-ur-gym-gazebo.
CoBT: Collaborative Programming of Behaviour Trees from One Demonstration for Robot Manipulation
Apr 10, 2024
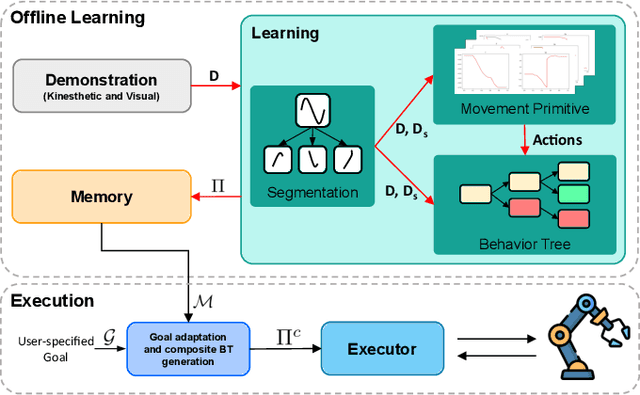


Mass customization and shorter manufacturing cycles are becoming more important among small and medium-sized companies. However, classical industrial robots struggle to cope with product variation and dynamic environments. In this paper, we present CoBT, a collaborative programming by demonstration framework for generating reactive and modular behavior trees. CoBT relies on a single demonstration and a combination of data-driven machine learning methods with logic-based declarative learning to learn a task, thus eliminating the need for programming expertise or long development times. The proposed framework is experimentally validated on 7 manipulation tasks and we show that CoBT achieves approx. 93% success rate overall with an average of 7.5s programming time. We conduct a pilot study with non-expert users to provide feedback regarding the usability of CoBT.
Analyzing Operator States and the Impact of AI-Enhanced Decision Support in Control Rooms: A Human-in-the-Loop Specialized Reinforcement Learning Framework for Intervention Strategies
Feb 20, 2024In complex industrial and chemical process control rooms, effective decision-making is crucial for safety and efficiency. The experiments in this paper evaluate the impact and applications of an AI-based decision support system integrated into an improved human-machine interface, using dynamic influence diagrams, a hidden Markov model, and deep reinforcement learning. The enhanced support system aims to reduce operator workload, improve situational awareness, and provide different intervention strategies to the operator adapted to the current state of both the system and human performance. Such a system can be particularly useful in cases of information overload when many alarms and inputs are presented all within the same time window, or for junior operators during training. A comprehensive cross-data analysis was conducted, involving 47 participants and a diverse range of data sources such as smartwatch metrics, eye-tracking data, process logs, and responses from questionnaires. The results indicate interesting insights regarding the effectiveness of the approach in aiding decision-making, decreasing perceived workload, and increasing situational awareness for the scenarios considered. Additionally, the results provide valuable insights to compare differences between styles of information gathering when using the system by individual participants. These findings are particularly relevant when predicting the overall performance of the individual participant and their capacity to successfully handle a plant upset and the alarms connected to it using process and human-machine interaction logs in real-time. These predictions enable the development of more effective intervention strategies.