 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoppler-aware Odometry from FMCW Scanning Radar
Aug 21, 2023This work explores Doppler information from a millimetre-Wave (mm-W) Frequency-Modulated Continuous-Wave (FMCW) scanning radar to make odometry estimation more robust and accurate. Firstly, doppler information is added to the scan masking process to enhance correlative scan matching. Secondly, we train a Neural Network (NN) for regressing forward velocity directly from a single radar scan; we fuse this estimate with the correlative scan matching estimate and show improved robustness to bad estimates caused by challenging environment geometries, e.g. narrow tunnels. We test our method with a novel custom dataset which is released with this work at https://ori.ox.ac.uk/publications/datasets.
Visual Servoing on Wheels: Robust Robot Orientation Estimation in Remote Viewpoint Control
Jun 26, 2023This work proposes a fast deployment pipeline for visually-servoed robots which does not assume anything about either the robot - e.g. sizes, colour or the presence of markers - or the deployment environment. In this, accurate estimation of robot orientation is crucial for successful navigation in complex environments; manual labelling of angular values is, though, time-consuming and possibly hard to perform. For this reason, we propose a weakly supervised pipeline that can produce a vast amount of data in a small amount of time. We evaluate our approach on a dataset of remote camera images captured in various indoor environments demonstrating high tracking performances when integrated into a fully-autonomous pipeline with a simple controller. With this, we then analyse the data requirement of our approach, showing how it is possible to deploy a new robot in a new environment in less than 30.00 min.
Off the Radar: Uncertainty-Aware Radar Place Recognition with Introspective Querying and Map Maintenance
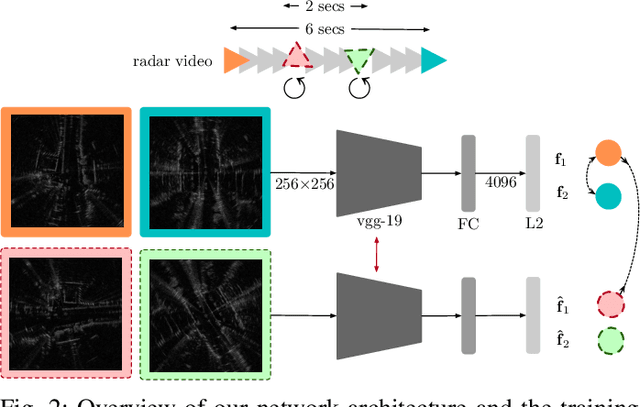
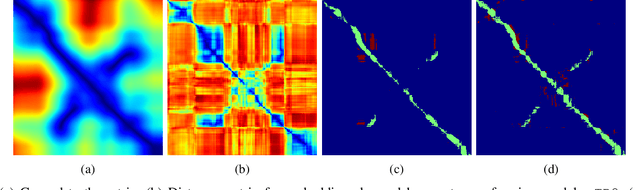
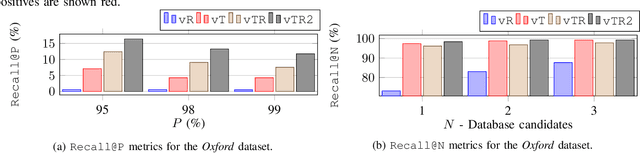
Jun 21, 2023Localisation with Frequency-Modulated Continuous-Wave (FMCW) radar has gained increasing interest due to its inherent resistance to challenging environments. However, complex artefacts of the radar measurement process require appropriate uncertainty estimation to ensure the safe and reliable application of this promising sensor modality. In this work, we propose a multi-session map management system which constructs the best maps for further localisation based on learned variance properties in an embedding space. Using the same variance properties, we also propose a new way to introspectively reject localisation queries that are likely to be incorrect. For this, we apply robust noise-aware metric learning, which both leverages the short-timescale variability of radar data along a driven path (for data augmentation) and predicts the downstream uncertainty in metric-space-based place recognition. We prove the effectiveness of our method over extensive cross-validated tests of the Oxford Radar RobotCar and MulRan dataset. In this, we outperform the current state-of-the-art in radar place recognition and other uncertainty-aware methods when using only single nearest-neighbour queries. We also show consistent performance increases when rejecting queries based on uncertainty over a difficult test environment, which we did not observe for a competing uncertainty-aware place recognition system.
* 8 pages, 6 figures
Visual DNA: Representing and Comparing Images using Distributions of Neuron Activations
Apr 20, 2023



Selecting appropriate datasets is critical in modern computer vision. However, no general-purpose tools exist to evaluate the extent to which two datasets differ. For this, we propose representing images - and by extension datasets - using Distributions of Neuron Activations (DNAs). DNAs fit distributions, such as histograms or Gaussians, to activations of neurons in a pre-trained feature extractor through which we pass the image(s) to represent. This extractor is frozen for all datasets, and we rely on its generally expressive power in feature space. By comparing two DNAs, we can evaluate the extent to which two datasets differ with granular control over the comparison attributes of interest, providing the ability to customise the way distances are measured to suit the requirements of the task at hand. Furthermore, DNAs are compact, representing datasets of any size with less than 15 megabytes. We demonstrate the value of DNAs by evaluating their applicability on several tasks, including conditional dataset comparison, synthetic image evaluation, and transfer learning, and across diverse datasets, ranging from synthetic cat images to celebrity faces and urban driving scenes.
BoxGraph: Semantic Place Recognition and Pose Estimation from 3D LiDAR
Jun 30, 2022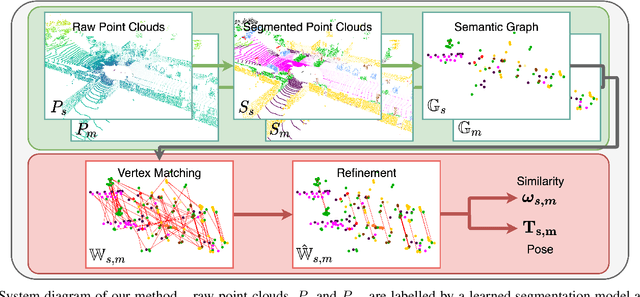
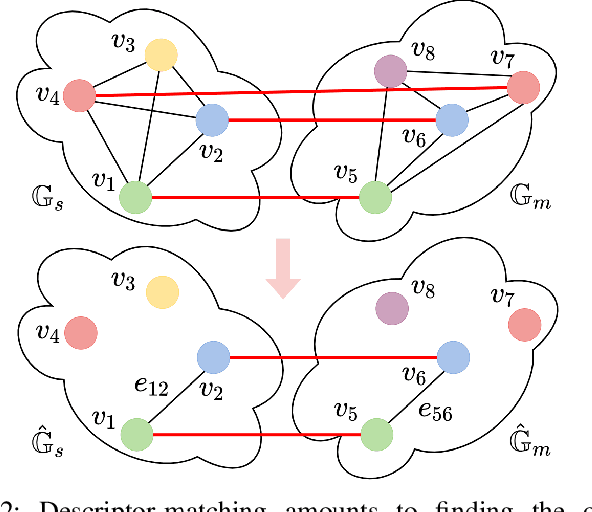
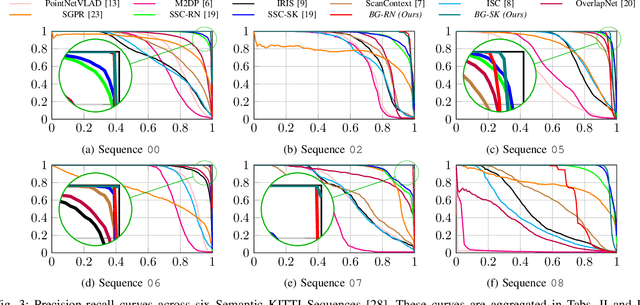

This paper is about extremely robust and lightweight localisation using LiDAR point clouds based on instance segmentation and graph matching. We model 3D point clouds as fully-connected graphs of semantically identified components where each vertex corresponds to an object instance and encodes its shape. Optimal vertex association across graphs allows for full 6-Degree-of-Freedom (DoF) pose estimation and place recognition by measuring similarity. This representation is very concise, condensing the size of maps by a factor of 25 against the state-of-the-art, requiring only 3kB to represent a 1.4MB laser scan. We verify the efficacy of our system on the SemanticKITTI dataset, where we achieve a new state-of-the-art in place recognition, with an average of 88.4% recall at 100% precision where the next closest competitor follows with 64.9%. We also show accurate metric pose estimation performance - estimating 6-DoF pose with median errors of 10 cm and 0.33 deg.
What Goes Around: Leveraging a Constant-curvature Motion Constraint in Radar Odometry
Jun 21, 2022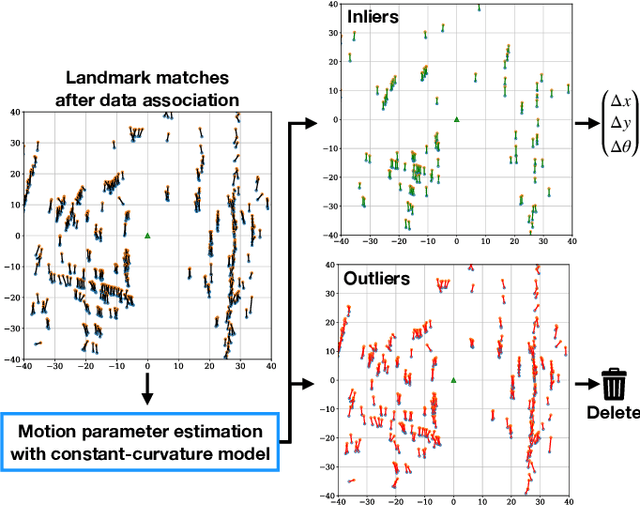
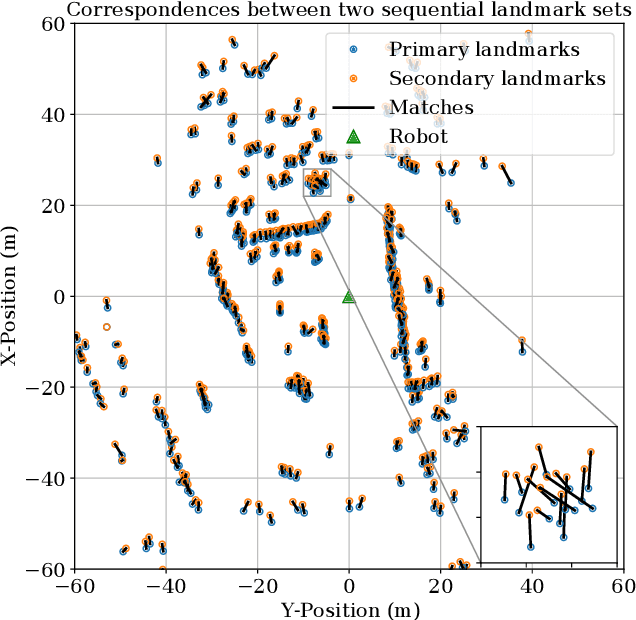
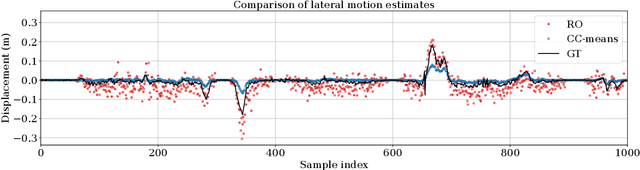
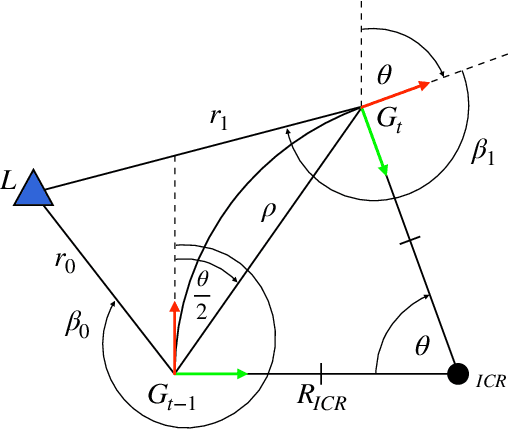
This paper presents a method that leverages vehicle motion constraints to refine data associations in a point-based radar odometry system. By using the strong prior on how a non-holonomic robot is constrained to move smoothly through its environment, we develop the necessary framework to estimate ego-motion from a single landmark association rather than considering all of these correspondences at once. This allows for informed outlier detection of poor matches that are a dominant source of pose estimate error. By refining the subset of matched landmarks, we see an absolute decrease of 2.15% (from 4.68% to 2.53%) in translational error, approximately halving the error in odometry (reducing by 45.94%) than when using the full set of correspondences. This contribution is relevant to other point-based odometry implementations that rely on a range sensor and provides a lightweight and interpretable means of incorporating vehicle dynamics for ego-motion estimation.
Depth-SIMS: Semi-Parametric Image and Depth Synthesis
Mar 07, 2022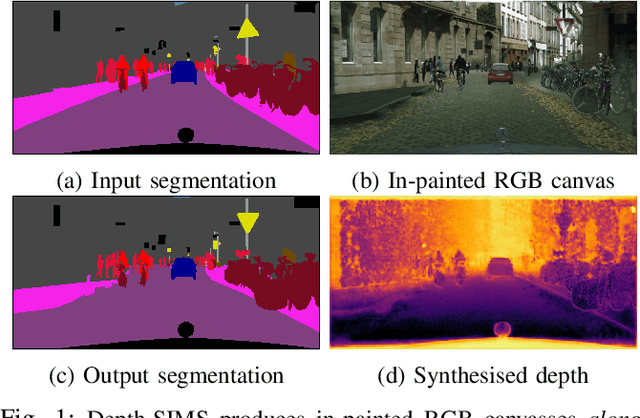
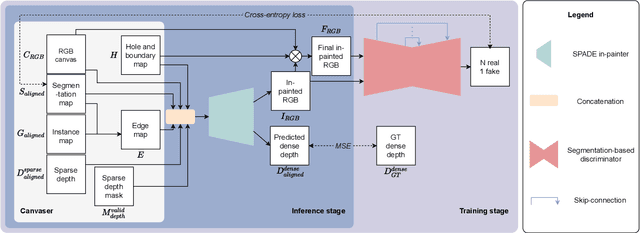
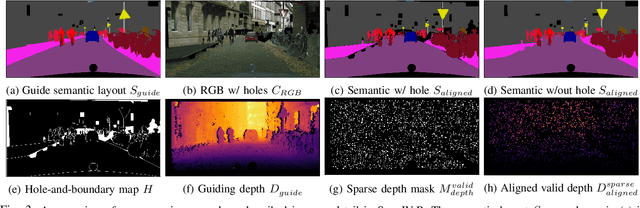
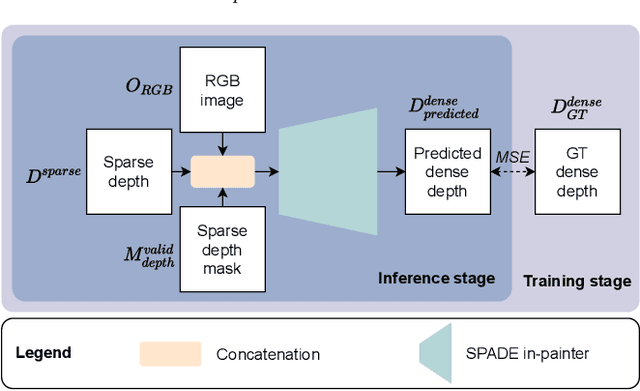
In this paper we present a compositing image synthesis method that generates RGB canvases with well aligned segmentation maps and sparse depth maps, coupled with an in-painting network that transforms the RGB canvases into high quality RGB images and the sparse depth maps into pixel-wise dense depth maps. We benchmark our method in terms of structural alignment and image quality, showing an increase in mIoU over SOTA by 3.7 percentage points and a highly competitive FID. Furthermore, we analyse the quality of the generated data as training data for semantic segmentation and depth completion, and show that our approach is more suited for this purpose than other methods.
Fast-MbyM: Leveraging Translational Invariance of the Fourier Transform for Efficient and Accurate Radar Odometry
Mar 01, 2022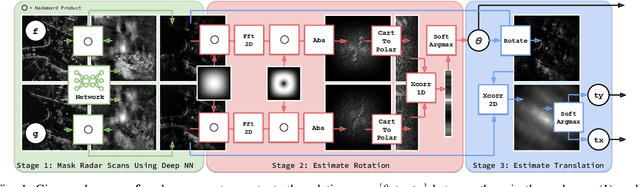
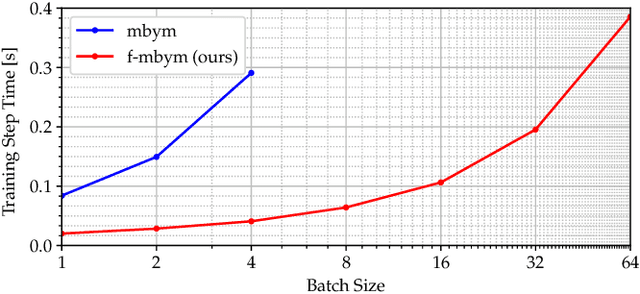
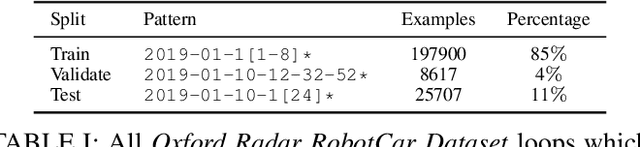
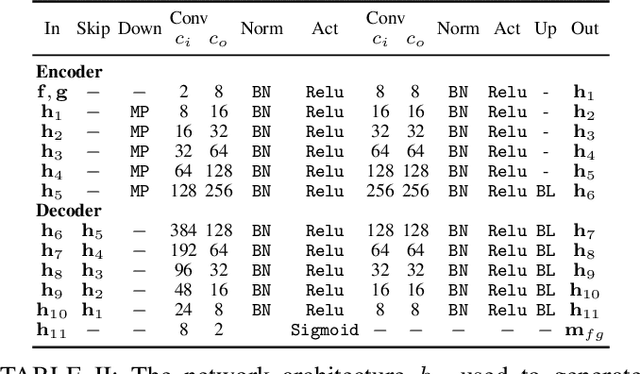
Masking By Moving (MByM), provides robust and accurate radar odometry measurements through an exhaustive correlative search across discretised pose candidates. However, this dense search creates a significant computational bottleneck which hinders real-time performance when high-end GPUs are not available. Utilising the translational invariance of the Fourier Transform, in our approach, f-MByM, we decouple the search for angle and translation. By maintaining end-to-end differentiability a neural network is used to mask scans and trained by supervising pose prediction directly. Training faster and with less memory, utilising a decoupled search allows f-MByM to achieve significant run-time performance improvements on a CPU (168%) and to run in real-time on embedded devices, in stark contrast to MByM. Throughout, our approach remains accurate and competitive with the best radar odometry variants available in the literature -- achieving an end-point drift of 2.01% in translation and 6.3deg/km on the Oxford Radar RobotCar Dataset.
Contrastive Learning for Unsupervised Radar Place Recognition
Oct 06, 2021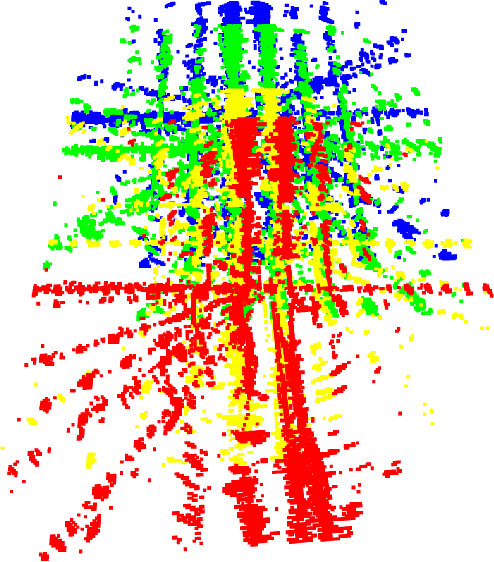
We learn, in an unsupervised way, an embedding from sequences of radar images that is suitable for solving the place recognition problem with complex radar data. Our method is based on invariant instance feature learning but is tailored for the task of re-localisation by exploiting for data augmentation the temporal successivity of data as collected by a mobile platform moving through the scene smoothly. We experiment across two prominent urban radar datasets totalling over 400 km of driving and show that we achieve a new radar place recognition state-of-the-art. Specifically, the proposed system proves correct for 98.38% of the queries that it is presented with over a challenging re-localisation sequence, using only the single nearest neighbour in the learned metric space. We also find that our learned model shows better understanding of out-of-lane loop closures at arbitrary orientation than non-learned radar scan descriptors.
The Oxford Road Boundaries Dataset
Jun 16, 2021



In this paper we present the Oxford Road Boundaries Dataset, designed for training and testing machine-learning-based road-boundary detection and inference approaches. We have hand-annotated two of the 10 km-long forays from the Oxford Robotcar Dataset and generated from other forays several thousand further examples with semi-annotated road-boundary masks. To boost the number of training samples in this way, we used a vision-based localiser to project labels from the annotated datasets to other traversals at different times and weather conditions. As a result, we release 62605 labelled samples, of which 47639 samples are curated. Each of these samples contains both raw and classified masks for left and right lenses. Our data contains images from a diverse set of scenarios such as straight roads, parked cars, junctions, etc. Files for download and tools for manipulating the labelled data are available at: oxford-robotics-institute.github.io/road-boundaries-dataset