 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Opinion-Integrated Decision making at Unsignalized Intersections via Signed Networks
Apr 10, 2026In this letter, we consider the problem of decentralized decision making among connected autonomous vehicles at unsignalized intersections, where existing centralized approaches do not scale gracefully under mixed maneuver intentions and coordinator failure. We propose a closed-loop opinion-dynamic decision model for intersection coordination, where vehicles exchange intent through dual signed networks: a conflict topology based communication network and a commitment-driven belief network that enable cooperation without a centralized coordinator. Continuous opinion states modulate velocity optimizer weights prior to commitment; a closed-form predictive feasibility gate then freezes each vehicle's decision into a GO or YIELD commitment, which propagates back through the belief network to pre-condition neighbor behavior ahead of physical conflicts. Crossing order emerges from geometric feasibility and arrival priority without the use of joint optimization or a solver. The approach is validated across three scenarios spanning fully competitive, merge, and mixed conflict topologies. The results demonstrate collision-free coordination and lower last-vehicle exit times compared to first come first served (FCFS) in all conflict non-trivial configurations.
Priority-Driven Safe Model Predictive Control Approach to Autonomous Driving Applications
May 09, 2025

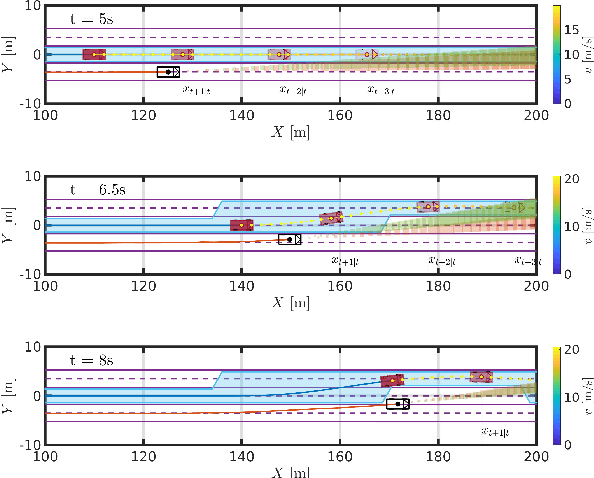

This paper demonstrates the applicability of the safe model predictive control (SMPC) framework to autonomous driving scenarios, focusing on the design of adaptive cruise control (ACC) and automated lane-change systems. Building on the SMPC approach with priority-driven constraint softening -- which ensures the satisfaction of \emph{hard} constraints under external disturbances by selectively softening a predefined subset of adjustable constraints -- we show how the algorithm dynamically relaxes lower-priority, comfort-related constraints in response to unexpected disturbances while preserving critical safety requirements such as collision avoidance and lane-keeping. A learning-based algorithm approximating the time consuming SMPC is introduced to enable real-time execution. Simulations in real-world driving scenarios subject to unpredicted disturbances confirm that this prioritized softening mechanism consistently upholds stringent safety constraints, underscoring the effectiveness of the proposed method.
Experimental Validation of Safe MPC for Autonomous Driving in Uncertain Environments
May 05, 2023The full deployment of autonomous driving systems on a worldwide scale requires that the self-driving vehicle be operated in a provably safe manner, i.e., the vehicle must be able to avoid collisions in any possible traffic situation. In this paper, we propose a framework based on Model Predictive Control (MPC) that endows the self-driving vehicle with the necessary safety guarantees. In particular, our framework ensures constraint satisfaction at all times, while tracking the reference trajectory as close as obstacles allow, resulting in a safe and comfortable driving behavior. To discuss the performance and real-time capability of our framework, we provide first an illustrative simulation example, and then we demonstrate the effectiveness of our framework in experiments with a real test vehicle.
ParkPredict: Motion and Intent Prediction of Vehicles in Parking Lots
Apr 21, 2020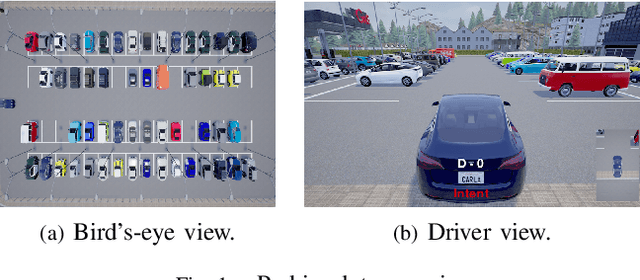
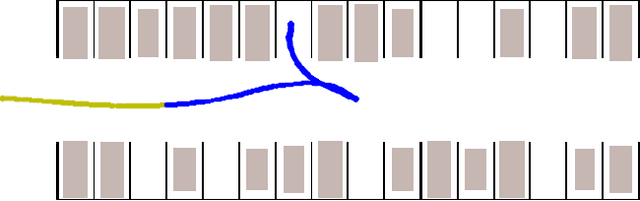
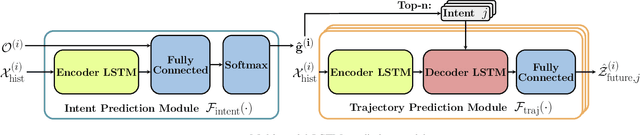
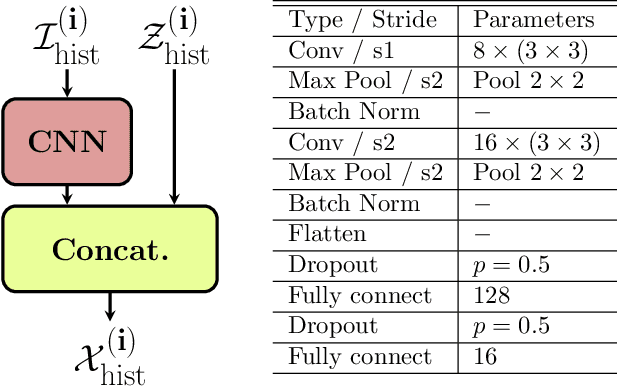
We investigate the problem of predicting driver behavior in parking lots, an environment which is less structured than typical road networks and features complex, interactive maneuvers in a compact space. Using the CARLA simulator, we develop a parking lot environment and collect a dataset of human parking maneuvers. We then study the impact of model complexity and feature information by comparing a multi-modal Long Short-Term Memory (LSTM) prediction model and a Convolution Neural Network LSTM (CNN-LSTM) to a physics-based Extended Kalman Filter (EKF) baseline. Our results show that 1) intent can be estimated well (roughly 85% top-1 accuracy and nearly 100% top-3 accuracy with the LSTM and CNN-LSTM model); 2) knowledge of the human driver's intended parking spot has a major impact on predicting parking trajectory; and 3) the semantic representation of the environment improves long term predictions.