 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePriority-Driven Safe Model Predictive Control Approach to Autonomous Driving Applications
May 09, 2025

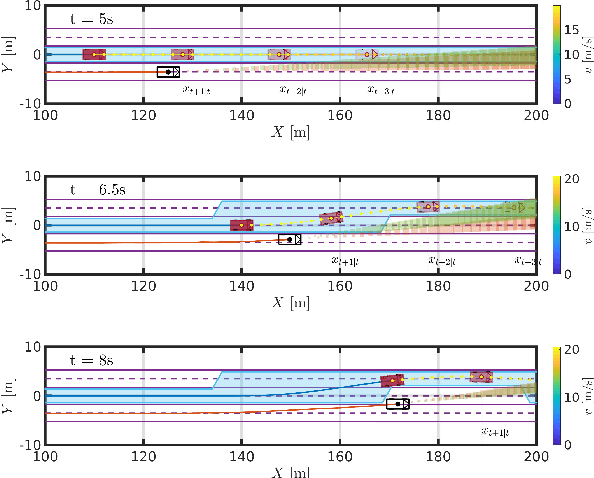

This paper demonstrates the applicability of the safe model predictive control (SMPC) framework to autonomous driving scenarios, focusing on the design of adaptive cruise control (ACC) and automated lane-change systems. Building on the SMPC approach with priority-driven constraint softening -- which ensures the satisfaction of \emph{hard} constraints under external disturbances by selectively softening a predefined subset of adjustable constraints -- we show how the algorithm dynamically relaxes lower-priority, comfort-related constraints in response to unexpected disturbances while preserving critical safety requirements such as collision avoidance and lane-keeping. A learning-based algorithm approximating the time consuming SMPC is introduced to enable real-time execution. Simulations in real-world driving scenarios subject to unpredicted disturbances confirm that this prioritized softening mechanism consistently upholds stringent safety constraints, underscoring the effectiveness of the proposed method.
A Tricycle Model to Accurately Control an Autonomous Racecar with Locked Differential
Dec 22, 2023In this paper, we present a novel formulation to model the effects of a locked differential on the lateral dynamics of an autonomous open-wheel racecar. The model is used in a Model Predictive Controller in which we included a micro-steps discretization approach to accurately linearize the dynamics and produce a prediction suitable for real-time implementation. The stability analysis of the model is presented, as well as a brief description of the overall planning and control scheme which includes an offline trajectory generation pipeline, an online local speed profile planner, and a low-level longitudinal controller. An improvement of the lateral path tracking is demonstrated in preliminary experimental results that have been produced on a Dallara AV-21 during the first Indy Autonomous Challenge event on the Monza F1 racetrack. Final adjustments and tuning have been performed in a high-fidelity simulator demonstrating the effectiveness of the solution when performing close to the tire limits.