 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBruce -- Design and Development of a Dynamic Hexapod Robot
Nov 01, 2020
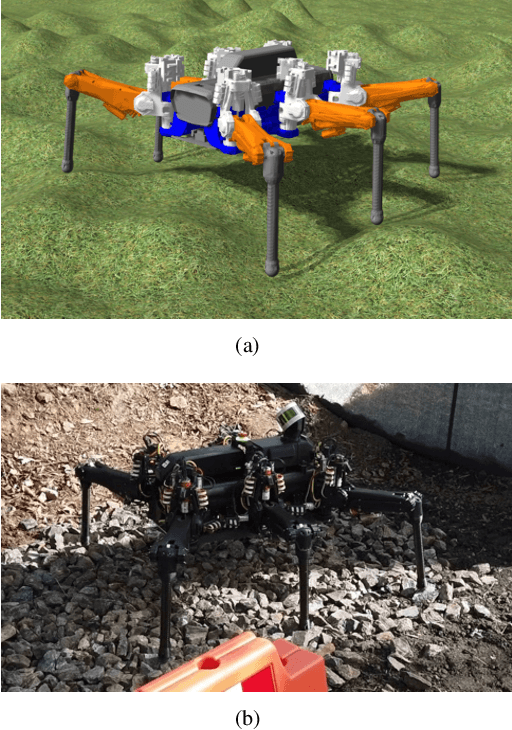
This paper introduces Bruce, the CSIRO Dynamic Hexapod Robot capable of autonomous, dynamic locomotion over difficult terrain. This robot is built around Apptronik linear series elastic actuators, and went from design to deployment in under a year by using approximately 80\% 3D printed structural (joints and link) parts. The robot has so far demonstrated rough terrain traversal over grass, rocks and rubble at 0.3m/s, and flat-ground speeds up to 0.5m/s. This was achieved with a simple controller, inspired by RHex, with a central pattern generator, task-frame impedance control for individual legs and no foot contact detection. The robot is designed to move at up to 1.0m/s on flat ground with appropriate control, and was deployed into the the DARPA SubT Challenge Tunnel circuit event in August 2019.
Virtual Surfaces and Attitude Aware Planning and Behaviours for Negative Obstacle Navigation
Oct 30, 2020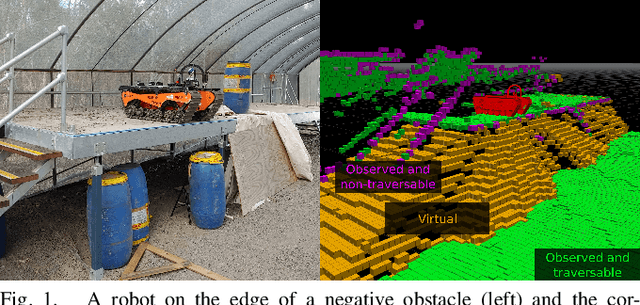
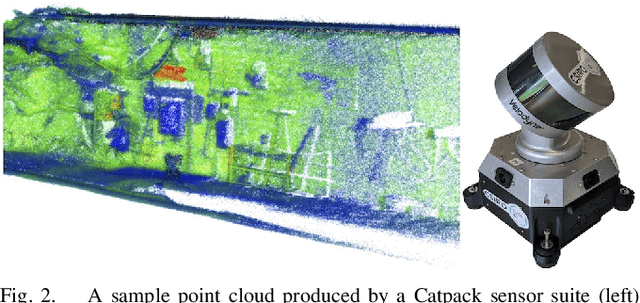
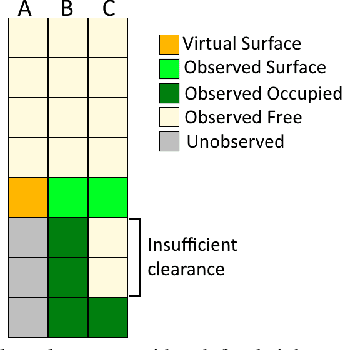
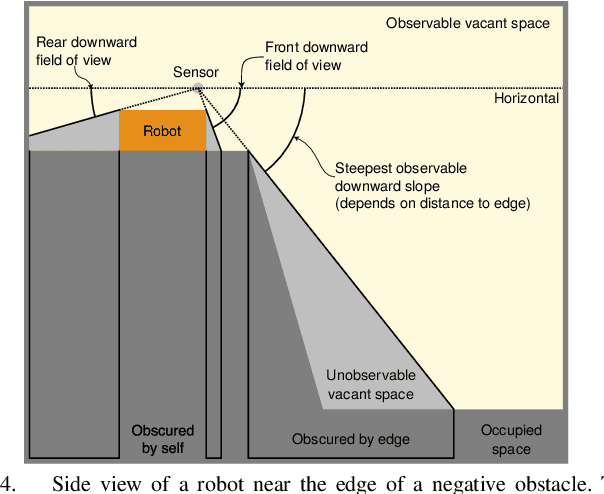
This paper presents an autonomous navigation system for ground robots traversing aggressive unstructured terrain through a cohesive arrangement of mapping, deliberative planning and reactive behaviour modules. All systems are aware of terrain slope, visibility and vehicle orientation, enabling robots to recognize, plan and react around unobserved areas and overcome negative obstacles, slopes, steps, overhangs and narrow passageways. This is the first work to explicitly couple mapping, planning and reactive components in dealing with negative obstacles. The system was deployed on three heterogeneous ground robots for the DARPA Subterranean Challenge, and we present results in Urban and Cave environments, along with simulated scenarios, that demonstrate this approach.
OpenSHC: A Versatile Multilegged Robot Controller
Jun 09, 2020
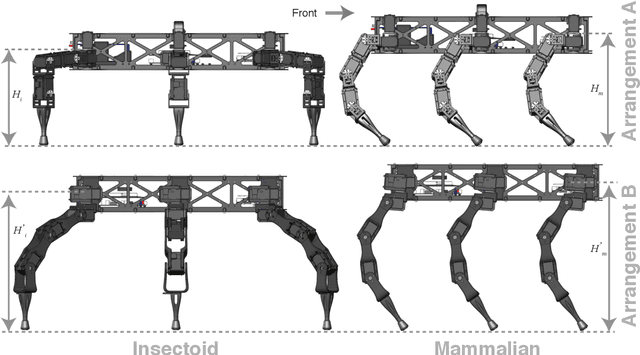
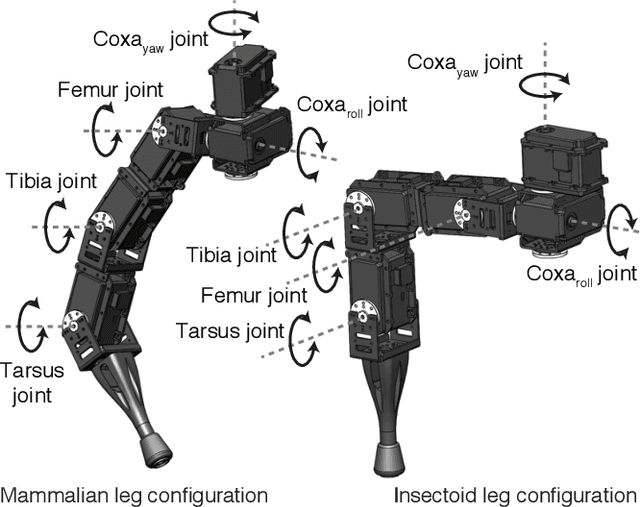
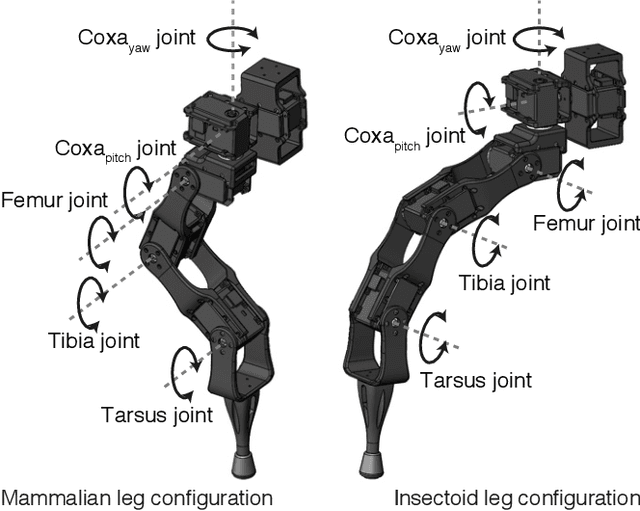
Multilegged robots have the ability to perform stable locomotion on relatively rough terrain. However, the complexity of legged robots over wheeled or tracked robots make them difficult to control. This paper presents OpenSHC (Open-source Syropod High-level Controller), a versatile high-level controller capable of generating gaits for quasi-static multilegged robots. With the Robot Operating System (ROS) integration, the controller can be quickly deployed on robots with different actuators and sensor payloads. The flexibility of OpenSHC is demonstrated on the 30 degrees of freedom hexapod Bullet, analysing the energetic performance of various leg configurations, kinematics arrangements and gaits over different locomotion speeds. With OpenSHC being easily configured to different physical and locomotion specifications, a hardware-based parameter space search for optimal locomotion parameters is conducted. The experimental evaluation shows that the mammalian configuration offers lower power consumption across a range of step frequencies; with the insectoid configuration providing performance advantages at higher body velocities and increased stability at low step frequencies. OpenSHC is open-source and able to be configured for various number of joints and legs.
Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces
Jan 31, 2019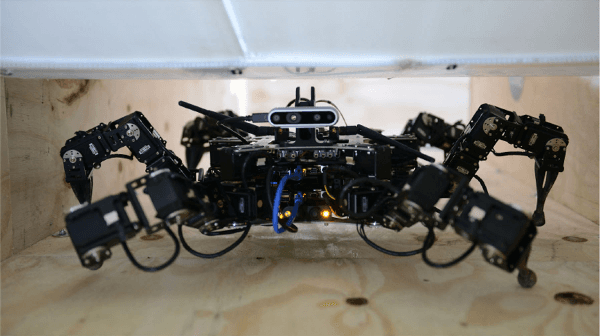
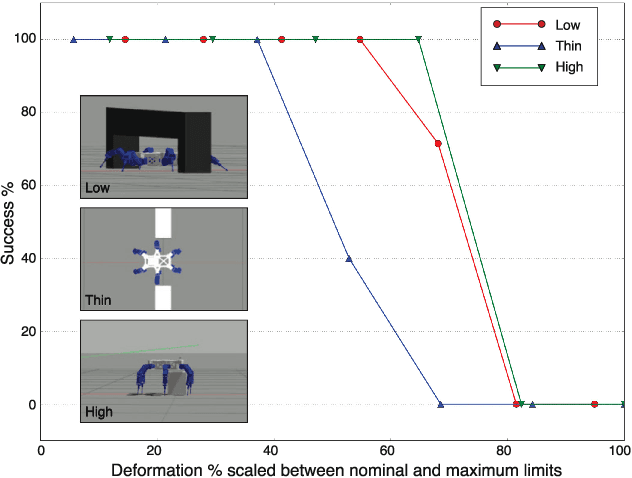
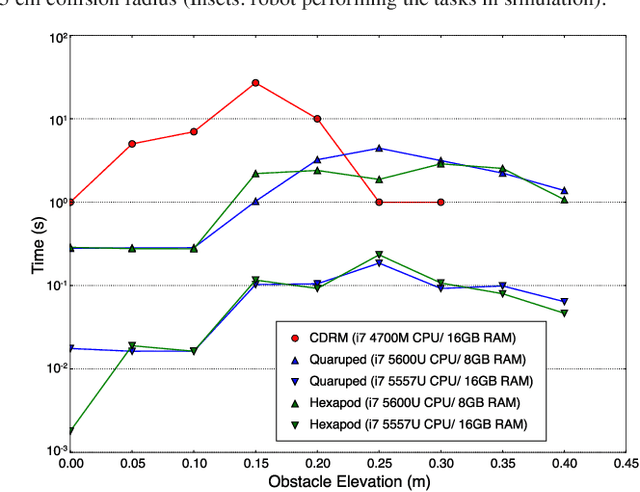
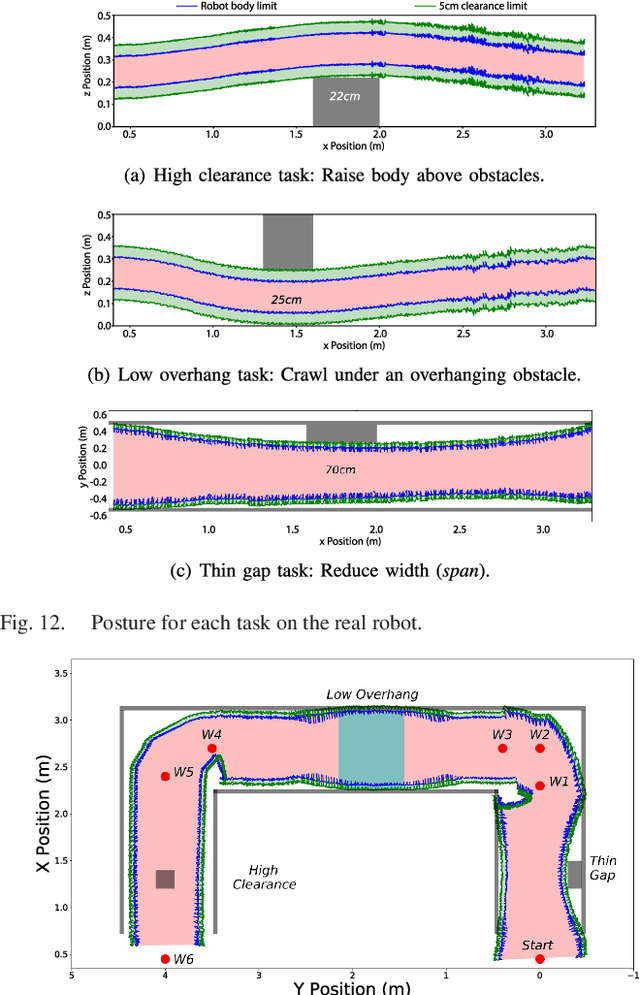
Legged robots have the ability to adapt their walking posture to navigate confined spaces due to their high degrees of freedom. However, this has not been exploited in most common multilegged platforms. This paper presents a deformable bounding box abstraction of the robot model, with accompanying mapping and planning strategies, that enable a legged robot to autonomously change its body shape to navigate confined spaces. The mapping is achieved using robot-centric multi-elevation maps generated with distance sensors carried by the robot. The path planning is based on the trajectory optimisation algorithm CHOMP which creates smooth trajectories while avoiding obstacles. The proposed method has been tested in simulation and implemented on the hexapod robot Weaver, which is 33cm tall and 82cm wide when walking normally. We demonstrate navigating under 25cm overhanging obstacles, through 70cm wide gaps and over 22cm high obstacles in both artificial testing spaces and realistic environments, including a subterranean mining tunnel.
Improving Online Multiple Object tracking with Deep Metric Learning
Jun 20, 2018
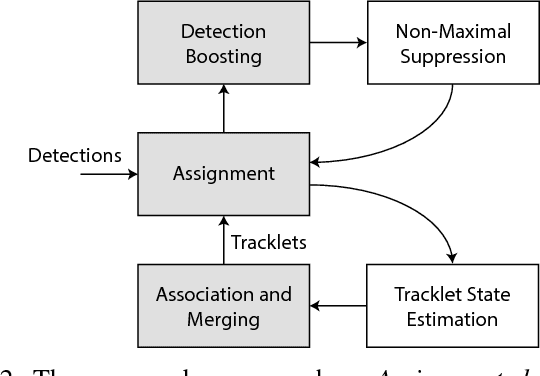
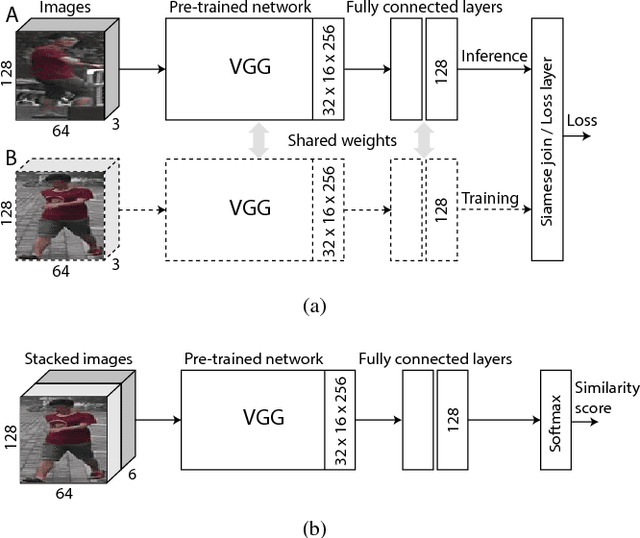
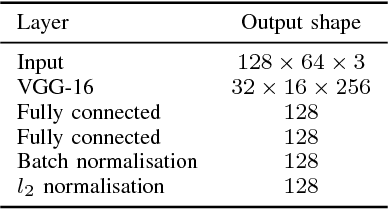
Tracking by detection is a common approach to solving the Multiple Object Tracking problem. In this paper we show how deep metric learning can be used to improve three aspects of tracking by detection. We train a convolutional neural network to learn an embedding function in a Siamese configuration on a large person re-identification dataset offline. It is then used to improve the online performance of tracking while retaining a high frame rate. We use this learned appearance metric to robustly build estimates of pedestrian's trajectories in the MOT16 dataset. In breaking with the tracking by detection model, we use our appearance metric to propose detections using the predicted state of a tracklet as a prior in the case where the detector fails. This method achieves competitive results in evaluation, especially among online, real-time approaches. We present an ablative study showing the impact of each of the three uses of our deep appearance metric.
Autonomous surveillance for biosecurity
Mar 04, 2015The global movement of people and goods has increased the risk of biosecurity threats and their potential to incur large economic, social, and environmental costs. Conventional manual biosecurity surveillance methods are limited by their scalability in space and time. This article focuses on autonomous surveillance systems, comprising sensor networks, robots, and intelligent algorithms, and their applicability to biosecurity threats. We discuss the spatial and temporal attributes of autonomous surveillance technologies and map them to three broad categories of biosecurity threat: (i) vector-borne diseases; (ii) plant pests; and (iii) aquatic pests. Our discussion reveals a broad range of opportunities to serve biosecurity needs through autonomous surveillance.