 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePDE foundation model-accelerated inverse estimation of system parameters in inertial confinement fusion
Mar 04, 2026PDE foundation models are typically pretrained on large, diverse corpora of PDE datasets and can be adapted to new settings with limited task-specific data. However, most downstream evaluations focus on forward problems, such as autoregressive rollout prediction. In this work, we study an inverse problem in inertial confinement fusion (ICF): estimating system parameters (inputs) from multi-modal, snapshot-style observations (outputs). Using the open JAG benchmark, which provides hyperspectral X-ray images and scalar observables per simulation, we finetune the PDE foundation model and train a lightweight task-specific head to jointly reconstruct hyperspectral images and regress system parameters. The fine-tuned model achieves accurate hyperspectral reconstruction (test MSE 1.2e-3) and strong parameter-estimation performance (up to R^2=0.995). Data-scaling experiments (5%-100% of the training set) show consistent improvements in both reconstruction and regression losses as the amount of training data increases, with the largest marginal gains in the low-data regime. Finally, finetuning from pretrained MORPH weights outperforms training the same architecture from scratch, demonstrating that foundation-model initialization improves sample efficiency for data-limited inverse problems in ICF.
TensorFI: A Flexible Fault Injection Framework for TensorFlow Applications
Apr 03, 2020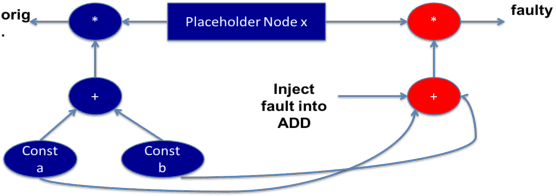
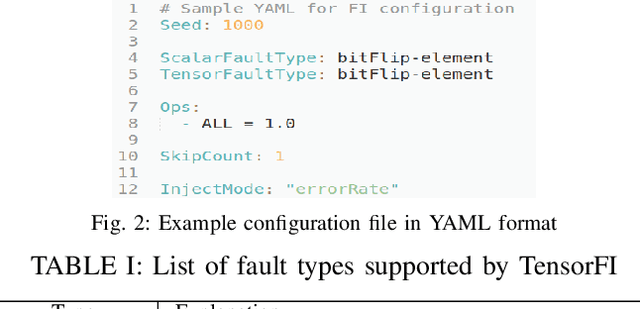
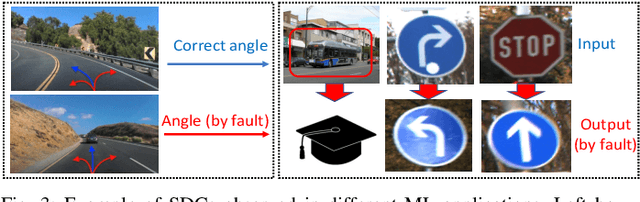
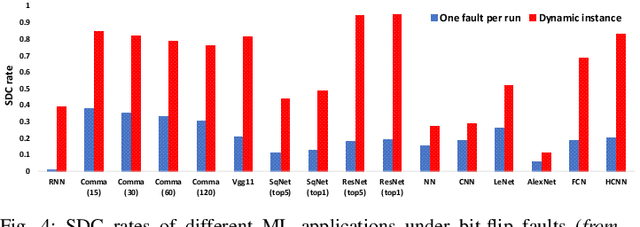
As machine learning (ML) has seen increasing adoption in safety-critical domains (e.g., autonomous vehicles), the reliability of ML systems has also grown in importance. While prior studies have proposed techniques to enable efficient error-resilience techniques (e.g., selective instruction duplication), a fundamental requirement for realizing these techniques is a detailed understanding of the application's resilience. In this work, we present TensorFI, a high-level fault injection (FI) framework for TensorFlow-based applications. TensorFI is able to inject both hardware and software faults in general TensorFlow programs. TensorFI is a configurable FI tool that is flexible, easy to use, and portable. It can be integrated into existing TensorFlow programs to assess their resilience for different fault types (e.g., faults in particular operators). We use TensorFI to evaluate the resilience of 12 ML programs, including DNNs used in the autonomous vehicle domain. Our tool is publicly available at https://github.com/DependableSystemsLab/TensorFI.