 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptMap: Geometric Map Distillation via Submodular Maximization
Dec 08, 2025



Autonomous robots rely on geometric maps to inform a diverse set of perception and decision-making algorithms. As autonomy requires reasoning and planning on multiple scales of the environment, each algorithm may require a different map for optimal performance. Light Detection And Ranging (LiDAR) sensors generate an abundance of geometric data to satisfy these diverse requirements, but selecting informative, size-constrained maps is computationally challenging as it requires solving an NP-hard combinatorial optimization. In this work we present OptMap: a geometric map distillation algorithm which achieves real-time, application-specific map generation via multiple theoretical and algorithmic innovations. A central feature is the maximization of set functions that exhibit diminishing returns, i.e., submodularity, using polynomial-time algorithms with provably near-optimal solutions. We formulate a novel submodular reward function which quantifies informativeness, reduces input set sizes, and minimizes bias in sequentially collected datasets. Further, we propose a dynamically reordered streaming submodular algorithm which improves empirical solution quality and addresses input order bias via an online approximation of the value of all scans. Testing was conducted on open-source and custom datasets with an emphasis on long-duration mapping sessions, highlighting OptMap's minimal computation requirements. Open-source ROS1 and ROS2 packages are available and can be used alongside any LiDAR SLAM algorithm.
Submodular Optimization for Keyframe Selection & Usage in SLAM
Oct 08, 2024



Keyframes are LiDAR scans saved for future reference in Simultaneous Localization And Mapping (SLAM), but despite their central importance most algorithms leave choices of which scans to save and how to use them to wasteful heuristics. This work proposes two novel keyframe selection strategies for localization and map summarization, as well as a novel approach to submap generation which selects keyframes that best constrain localization. Our results show that online keyframe selection and submap generation reduce the number of saved keyframes and improve per scan computation time without compromising localization performance. We also present a map summarization feature for quickly capturing environments under strict map size constraints.
Autonomous Vehicle Benchmarking using Unbiased Metrics
Jun 03, 2020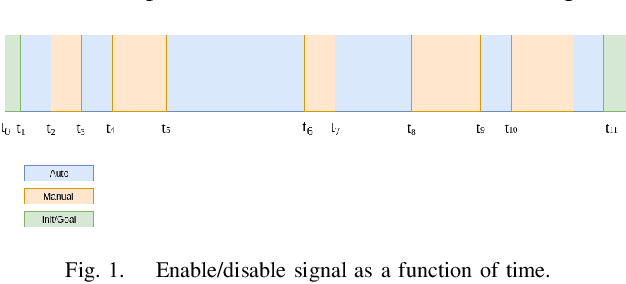
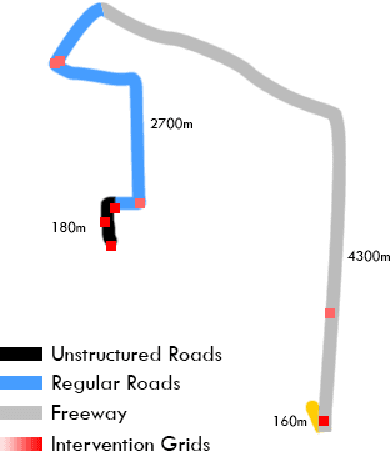
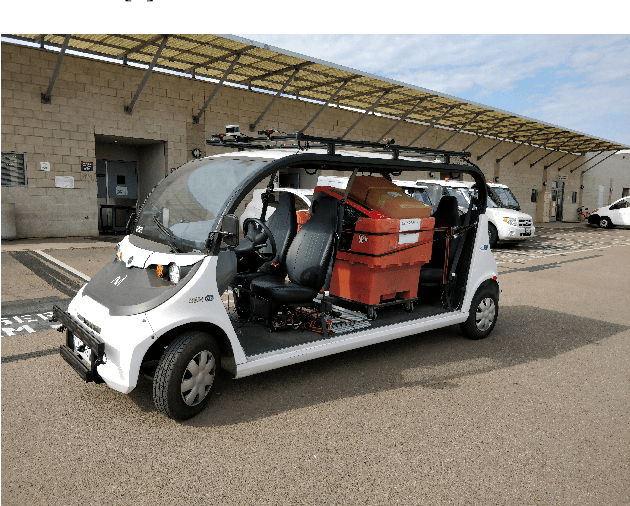
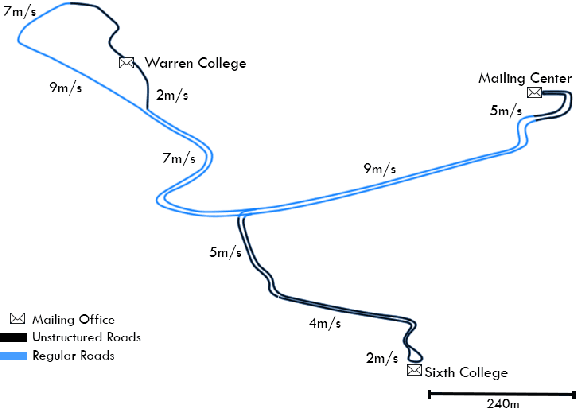
With the recent development of autonomous vehicle technology, there have been active efforts on the deployment of this technology at different scales that include urban and highway driving. While many of the prototypes showcased have shown to operate under specific cases, little effort has been made to better understand their shortcomings and generalizability to new areas. Distance, uptime and number of manual disengagements performed during autonomous driving provide a high-level idea on the performance of an autonomous system but without proper data normalization, testing location information, and the number of vehicles involved in testing, the disengagement reports alone do not fully encompass system performance and robustness. Thus, in this study a complete set of metrics are proposed for benchmarking autonomous vehicle systems in a variety of scenarios that can be extended for comparison with human drivers. These metrics have been used to benchmark UC San Diego's autonomous vehicle platforms during early deployments for micro-transit and autonomous mail delivery applications.