 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReqFusion: A Multi-Provider Framework for Automated PEGS Analysis Across Software Domains
Mar 24, 2026Requirements engineering is a vital, yet labor-intensive, stage in the software development process. This article introduces ReqFusion: an AI-enhanced system that automates the extraction, classification, and analysis of software requirements utilizing multiple Large Language Model (LLM) providers. The architecture of ReqFusion integrates OpenAI GPT, Anthropic Claude, and Groq models to extract functional and non-functional requirements from various documentation formats (PDF, DOCX, and PPTX) in academic, industrial, and tender proposal contexts. The system uses a domain-independent extraction method and generates requirements following the Project, Environment, Goal, and System (PEGS) approach introduced by Bertrand Meyer. The main idea is that, because the PEGS format is detailed, LLMs have more information and cues about the requirements, producing better results than a simple generic request. An ablation study confirms this hypothesis: PEGS-guided prompting achieves an F1 score of 0.88, compared to 0.71 for generic prompting under the same multi-provider configuration. The evaluation used 18 real-world documents to generate 226 requirements through automated classification, with 54.9% functional and 45.1% nonfunctional across academic, business, and technical domains. An extended evaluation on five projects with 1,050 requirements demonstrated significant improvements in extraction accuracy and a 78% reduction in analysis time compared to manual methods. The multi-provider architecture enhances reliability through model consensus and fallback mechanisms, while the PEGS-based approach ensures comprehensive coverage of all requirement categories.
An Industrial-Scale Retrieval-Augmented Generation Framework for Requirements Engineering: Empirical Evaluation with Automotive Manufacturing Data
Mar 20, 2026Requirements engineering in Industry 4.0 faces critical challenges with heterogeneous, unstructured documentation spanning technical specifications, supplier lists, and compliance standards. While retrieval-augmented generation (RAG) shows promise for knowledge-intensive tasks, no prior work has evaluated RAG on authentic industrial RE workflows using comprehensive production-grade performance metrics. This paper presents a comprehensive empirical evaluation of RAG for industrial requirements engineering automation using authentic automotive manufacturing documentation comprising 669 requirements across four specification standards (MBN 9666-1, MBN 9666-2, BQF 9666-5, MBN 9666-9) spanning 2015-2023, plus 49 supplier qualifications with extensive supporting documentation. Through controlled comparisons with BERT-based and ungrounded LLM approaches, the framework achieves 98.2% extraction accuracy with complete traceability, outperforming baselines by 24.4% and 19.6%, respectively. Hybrid semantic-lexical retrieval achieves MRR of 0.847. Expert quality assessment averaged 4.32/5.0 across five dimensions. The evaluation demonstrates 83% reduction in manual analysis time and 47% cost savings through multi-provider LLM orchestration. Ablation studies quantify individual component contributions. Longitudinal analysis reveals a 55% reduction in requirement volume coupled with 1,800% increase in IT security focus, identifying 10 legacy suppliers (20.4%) requiring requalification, representing potential $2.3M in avoided contract penalties.
Reasoning-guided Collaborative Filtering with Language Models for Explainable Recommendation
Feb 05, 2026Large Language Models (LLMs) exhibit potential for explainable recommendation systems but overlook collaborative signals, while prevailing methods treat recommendation and explanation as separate tasks, resulting in a memory footprint. We present RGCF-XRec, a hybrid framework that introduces reasoning-guided collaborative filtering (CF) knowledge into a language model to deliver explainable sequential recommendations in a single step. Theoretical grounding and empirical findings reveal that RGCF-XRec offers three key merits over leading CF-aware LLM-based methods: (1) reasoning-guided augmentation of CF knowledge through contextual prompting to discover latent preferences and interpretable reasoning paths; (2) an efficient scoring mechanism based on four dimensions: coherence, completeness, relevance, and consistency to mitigate noisy CF reasoning traces and retain high-quality explanations; (3) a unified representation learning network that encodes collaborative and semantic signals, enabling a structured prompt to condition the LLM for explainable sequential recommendation. RGCF-XRec demonstrates consistent improvements across Amazon datasets, Sports, Toys, and Beauty, comprising 642,503 user-item interactions. It improves HR@10 by 7.38\% in Sports and 4.59\% in Toys, along with ROUGE-L by 8.02\% and 3.49\%, respectively. It reduces the cold warm performance gap, achieving overall gains of 14.5\% in cold-start and 11.9\% in warm start scenarios, and enhances zero-shot HR@5 by 18.54\% in Beauty and 23.16\% in Toys, highlighting effective generalization and robustness. Moreover, RGCF-XRec achieves training efficiency with a lightweight LLaMA 3.2-3B backbone, ensuring scalability for real-world applications.
Mapping the Mind of an Instruction-based Image Editing using SMILE
Dec 20, 2024



Despite recent advancements in Instruct-based Image Editing models for generating high-quality images, they are known as black boxes and a significant barrier to transparency and user trust. To solve this issue, we introduce SMILE (Statistical Model-agnostic Interpretability with Local Explanations), a novel model-agnostic for localized interpretability that provides a visual heatmap to clarify the textual elements' influence on image-generating models. We applied our method to various Instruction-based Image Editing models like Pix2Pix, Image2Image-turbo and Diffusers-Inpaint and showed how our model can improve interpretability and reliability. Also, we use stability, accuracy, fidelity, and consistency metrics to evaluate our method. These findings indicate the exciting potential of model-agnostic interpretability for reliability and trustworthiness in critical applications such as healthcare and autonomous driving while encouraging additional investigation into the significance of interpretability in enhancing dependable image editing models.
Deep Reinforcement Learning based Evasion Generative Adversarial Network for Botnet Detection
Oct 06, 2022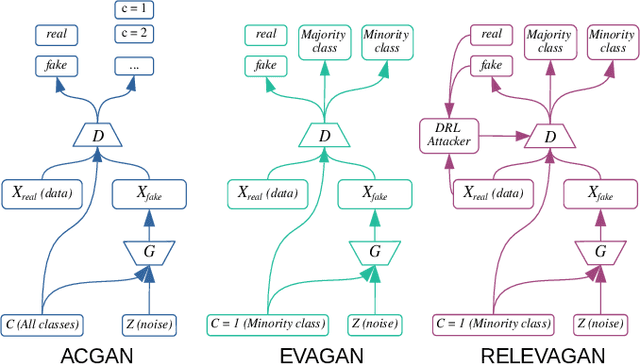
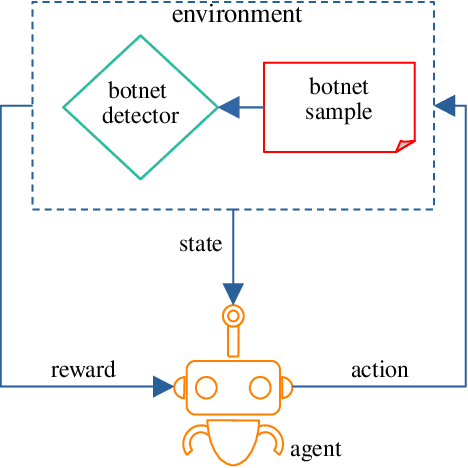
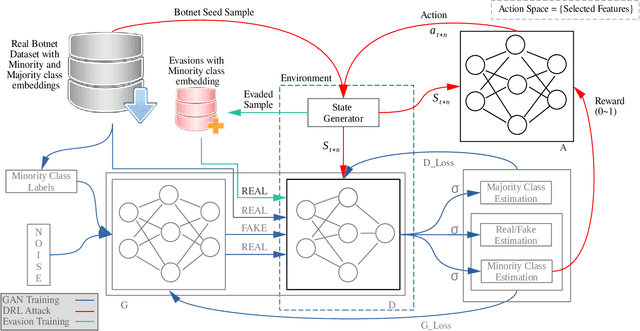
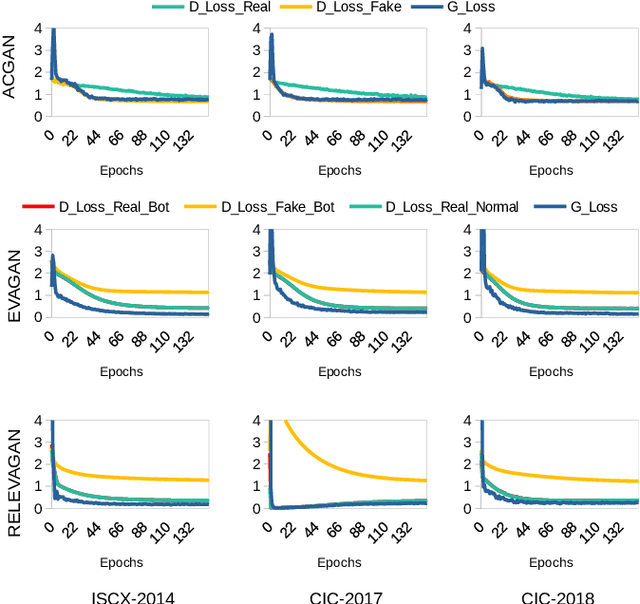
Botnet detectors based on machine learning are potential targets for adversarial evasion attacks. Several research works employ adversarial training with samples generated from generative adversarial nets (GANs) to make the botnet detectors adept at recognising adversarial evasions. However, the synthetic evasions may not follow the original semantics of the input samples. This paper proposes a novel GAN model leveraged with deep reinforcement learning (DRL) to explore semantic aware samples and simultaneously harden its detection. A DRL agent is used to attack the discriminator of the GAN that acts as a botnet detector. The discriminator is trained on the crafted perturbations by the agent during the GAN training, which helps the GAN generator converge earlier than the case without DRL. We name this model RELEVAGAN, i.e. ["relive a GAN" or deep REinforcement Learning-based Evasion Generative Adversarial Network] because, with the help of DRL, it minimises the GAN's job by letting its generator explore the evasion samples within the semantic limits. During the GAN training, the attacks are conducted to adjust the discriminator weights for learning crafted perturbations by the agent. RELEVAGAN does not require adversarial training for the ML classifiers since it can act as an adversarial semantic-aware botnet detection model. Code will be available at https://github.com/rhr407/RELEVAGAN.
Learning-Based Path Planning for Long-Range Autonomous Valet Parking
Sep 23, 2021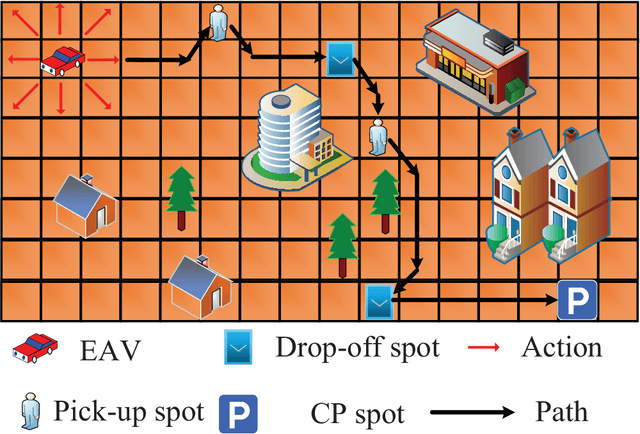
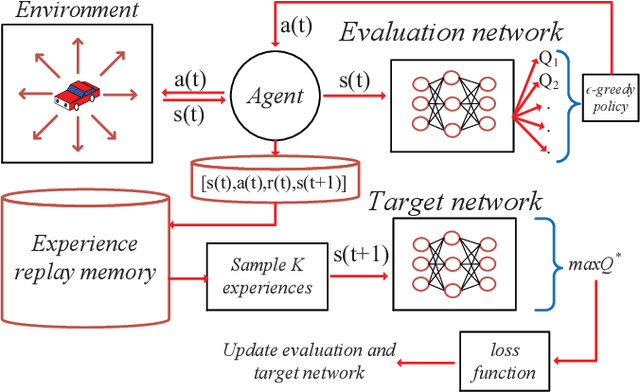
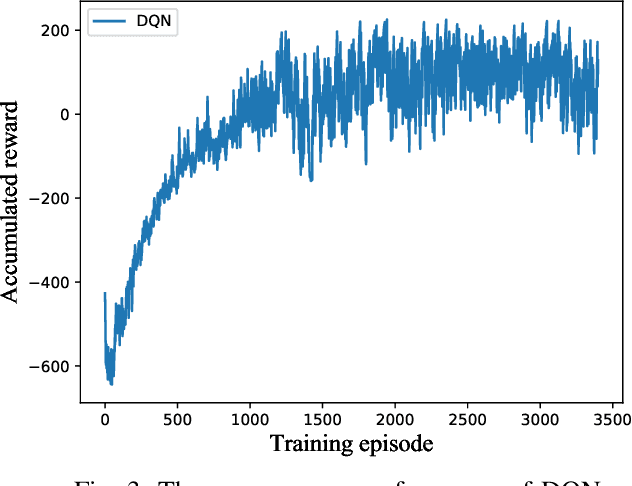
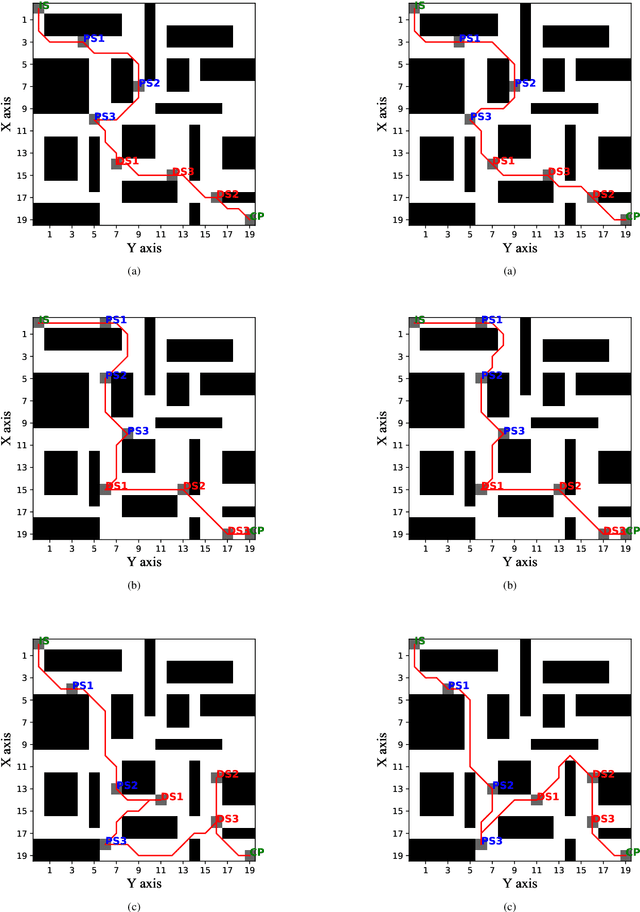
In this paper, to reduce the congestion rate at the city center and increase the quality of experience (QoE) of each user, the framework of long-range autonomous valet parking (LAVP) is presented, where an Electric Autonomous Vehicle (EAV) is deployed in the city, which can pick up, drop off users at their required spots, and then drive to the car park out of city center autonomously. In this framework, we aim to minimize the overall distance of the EAV, while guarantee all users are served, i.e., picking up, and dropping off users at their required spots through optimizing the path planning of the EAV and number of serving time slots. To this end, we first propose a learning based algorithm, which is named as Double-Layer Ant Colony Optimization (DL-ACO) algorithm to solve the above problem in an iterative way. Then, to make the real-time decision, while consider the dynamic environment (i.e., the EAV may pick up and drop off users from different locations), we further present a deep reinforcement learning (DRL) based algorithm, which is known as deep Q network (DQN). The experimental results show that the DL-ACO and DQN-based algorithms both achieve the considerable performance.