 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Action-based Representations Using Invariance
Mar 25, 2024Robust reinforcement learning agents using high-dimensional observations must be able to identify relevant state features amidst many exogeneous distractors. A representation that captures controllability identifies these state elements by determining what affects agent control. While methods such as inverse dynamics and mutual information capture controllability for a limited number of timesteps, capturing long-horizon elements remains a challenging problem. Myopic controllability can capture the moment right before an agent crashes into a wall, but not the control-relevance of the wall while the agent is still some distance away. To address this we introduce action-bisimulation encoding, a method inspired by the bisimulation invariance pseudometric, that extends single-step controllability with a recursive invariance constraint. By doing this, action-bisimulation learns a multi-step controllability metric that smoothly discounts distant state features that are relevant for control. We demonstrate that action-bisimulation pretraining on reward-free, uniformly random data improves sample efficiency in several environments, including a photorealistic 3D simulation domain, Habitat. Additionally, we provide theoretical analysis and qualitative results demonstrating the information captured by action-bisimulation.
Integration of Riemannian Motion Policy and Whole-Body Control for Dynamic Legged Locomotion
Oct 07, 2022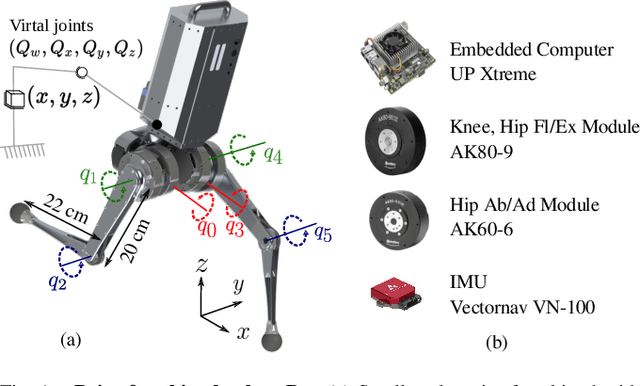
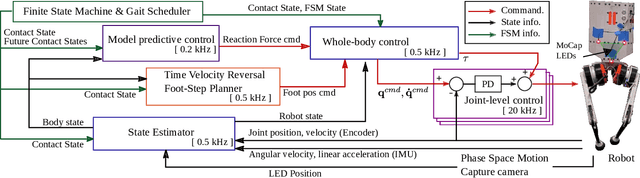
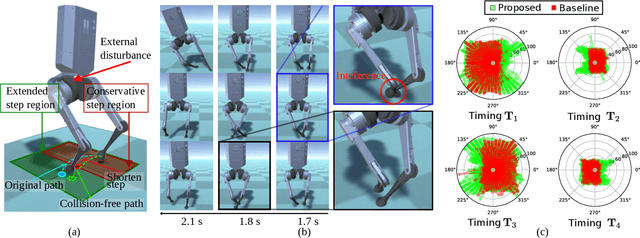
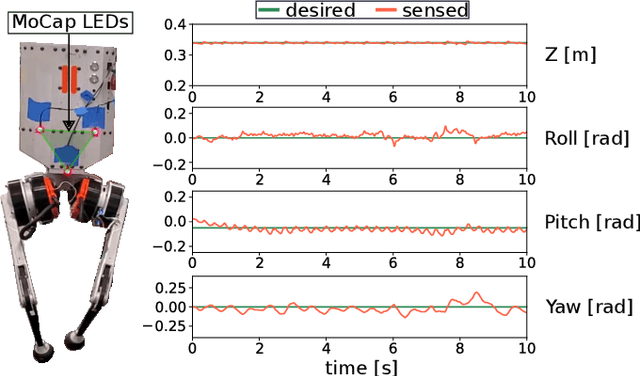
In this paper, we present a novel Riemannian Motion Policy (RMP)flow-based whole-body control framework for improved dynamic legged locomotion. RMPflow is a differential geometry-inspired algorithm for fusing multiple task-space policies (RMPs) into a configuration space policy in a geometrically consistent manner. RMP-based approaches are especially suited for designing simultaneous tracking and collision avoidance behaviors and have been successfully deployed on serial manipulators. However, one caveat of RMPflow is that it is designed with fully actuated systems in mind. In this work, we, for the first time, extend it to the domain of dynamic-legged systems, which have unforgiving under-actuation and limited control input. Thorough push recovery experiments are conducted in simulation to validate the overall framework. We show that expanding the valid stepping region with an RMP-based collision-avoidance swing leg controller improves balance robustness against external disturbances by up to $53\%$ compared to a baseline approach using a restricted stepping region. Furthermore, a point-foot biped robot is purpose-built for experimental studies of dynamic biped locomotion. A preliminary unassisted in-place stepping experiment is conducted to show the viability of the control framework and hardware.