 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning Enabled Automatic Impedance Control of a Robotic Knee Prosthesis to Mimic the Intact Knee Motion in a Co-Adapting Environment
Jan 10, 2021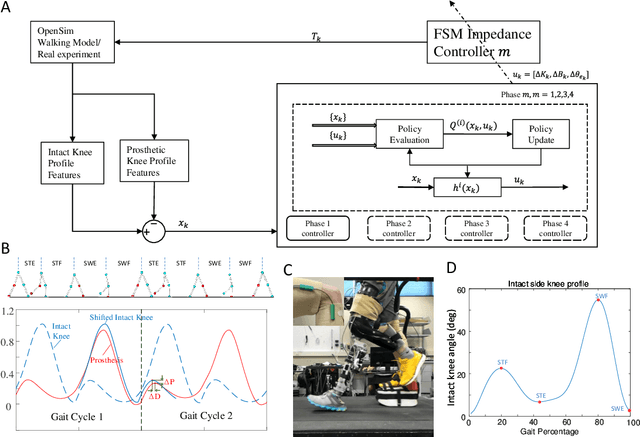
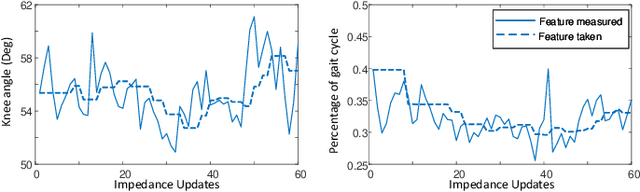
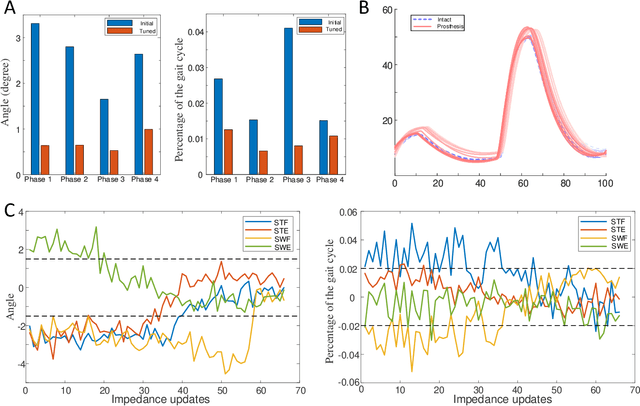
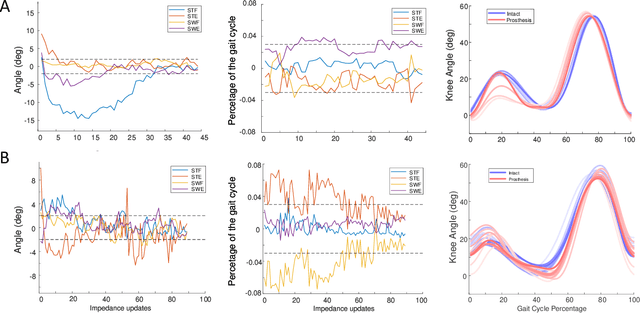
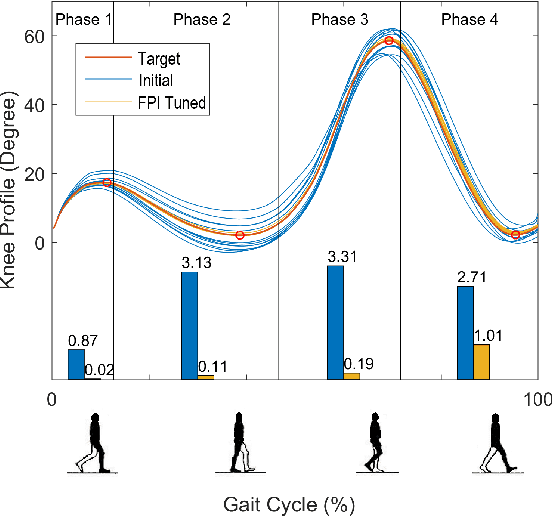
Automatically configuring a robotic prosthesis to fit its user's needs and physical conditions is a great technical challenge and a roadblock to the adoption of the technology. Previously, we have successfully developed reinforcement learning (RL) solutions toward addressing this issue. Yet, our designs were based on using a subjectively prescribed target motion profile for the robotic knee during level ground walking. This is not realistic for different users and for different locomotion tasks. In this study for the first time, we investigated the feasibility of RL enabled automatic configuration of impedance parameter settings for a robotic knee to mimic the intact knee motion in a co-adapting environment. We successfully achieved such tracking control by an online policy iteration. We demonstrated our results in both OpenSim simulations and two able-bodied (AB) subjects.
A Data-Driven Reinforcement Learning Solution Framework for Optimal and Adaptive Personalization of a Hip Exoskeleton
Nov 11, 2020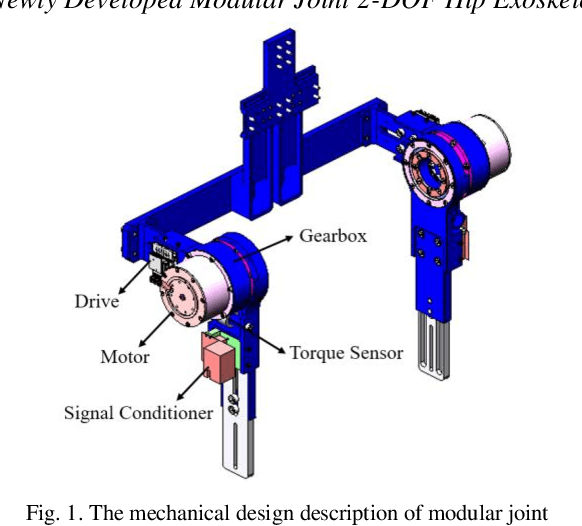
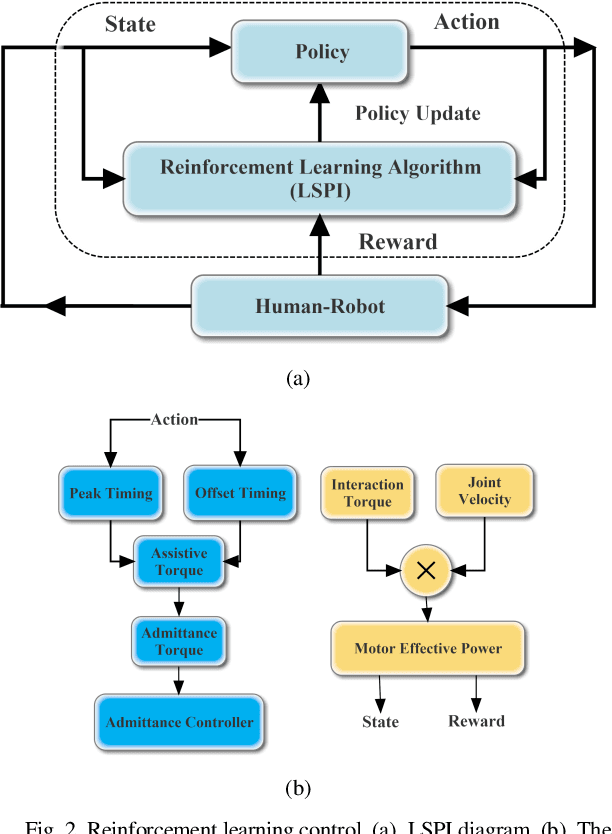
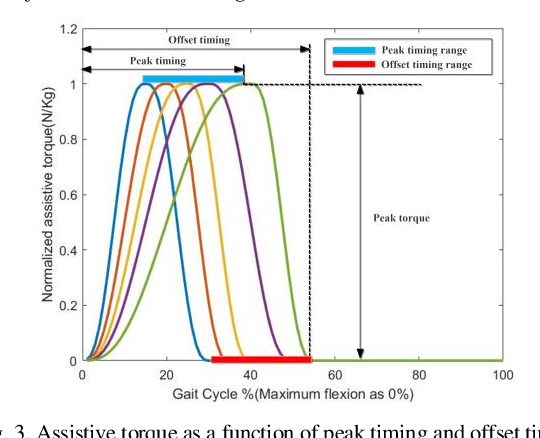
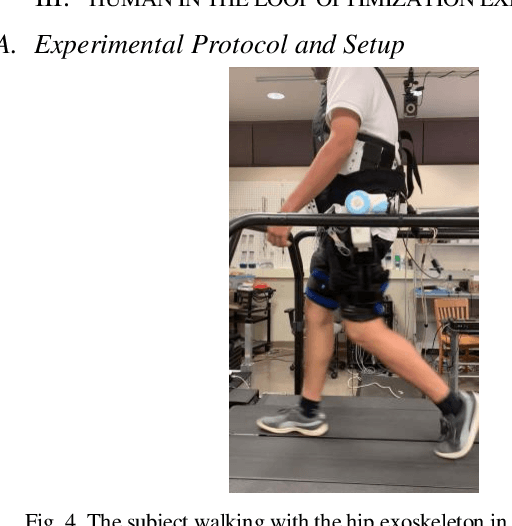
Robotic exoskeletons are exciting technologies for augmenting human mobility. However, designing such a device for seamless integration with the human user and to assist human movement still is a major challenge. This paper aims at developing a novel data-driven solution framework based on reinforcement learning (RL), without first modeling the human-robot dynamics, to provide optimal and adaptive personalized torque assistance for reducing human efforts during walking. Our automatic personalization solution framework includes the assistive torque profile with two control timing parameters (peak and offset timings), the least square policy iteration (LSPI) for learning the parameter tuning policy, and a cost function based on transferred work ratio. The proposed controller was successfully validated on a healthy human subject to assist unilateral hip extension in walking. The results showed that the optimal and adaptive RL controller as a new approach was feasible for tuning assistive torque profile of the hip exoskeleton that coordinated with human actions and reduced activation level of hip extensor muscle in human.
Reinforcement Learning Control of Robotic Knee with Human in the Loop by Flexible Policy Iteration
Jun 16, 2020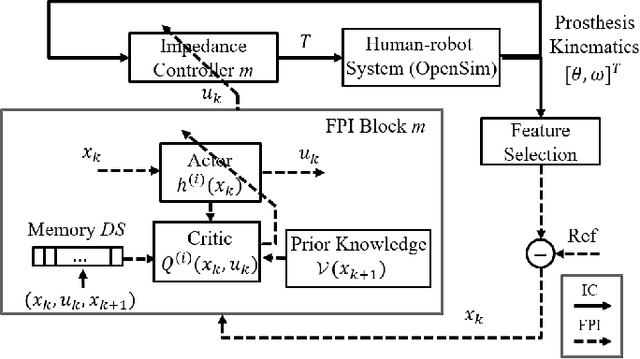
This study is motivated by a new class of challenging control problems described by automatic tuning of robotic knee control parameters with human in the loop. In addition to inter-person and intra-person variances inherent in such human-robot systems, human user safety and stability, as well as data and time efficiency should also be taken into design consideration. Here by data and time efficiency we mean learning and adaptation of device configurations takes place within countable gait cycles or within minutes of time. As solutions to this problem is not readily available, we therefore propose a new policy iteration based adaptive dynamic programming algorithm, namely the flexible policy iteration (FPI). We show that the FPI solves the control parameters via (weighted) least-squares while it incorporates data flexibly and utilizes prior knowledge. We provide analyses on stable control policies, non-increasing and converging value functions to Bellman optimality, and error bounds on the iterative value functions subject to approximation errors. We extensively evaluated the performance of FPI in a well-established locomotion simulator, the OpenSim under realistic conditions. By inspecting FPI with three other comparable algorithms, we demonstrate the FPI as a feasible data and time efficient design approach for adapting the control parameters of the prosthetic knee to co-adapt with the human user who also places control on the prosthesis. As the proposed FPI algorithm does not require stringent constraints or peculiar assumptions, we expect this reinforcement learning controller can potentially be applied to other challenging adaptive optimal control problems.
Novel and Efficient Approximations for Zero-One Loss of Linear Classifiers
Feb 28, 2019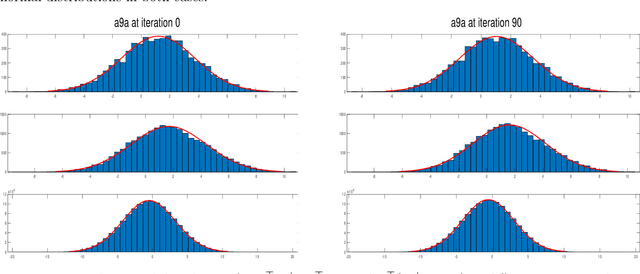
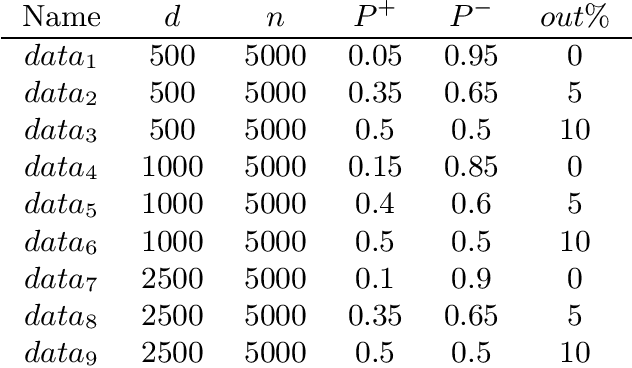
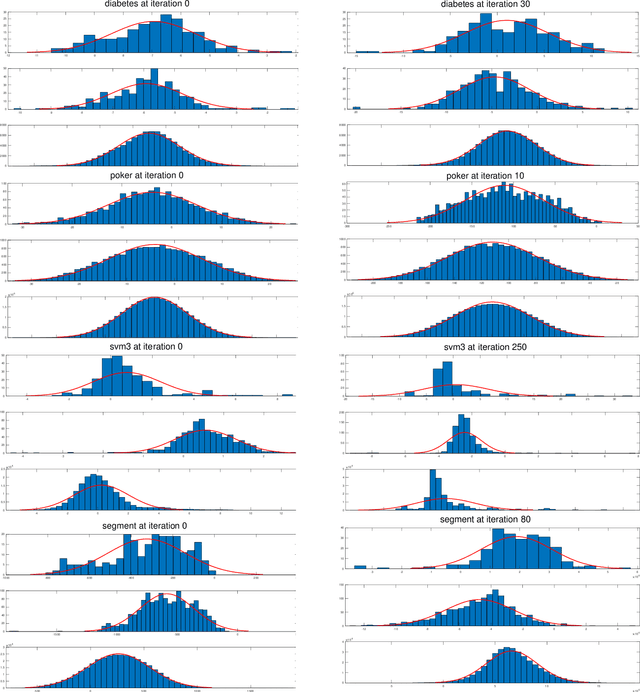
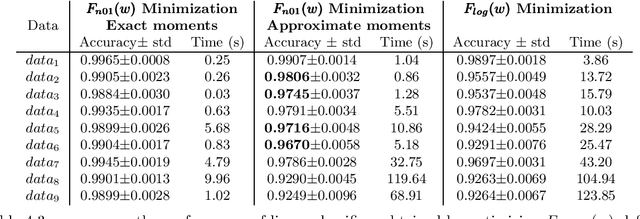
The predictive quality of machine learning models is typically measured in terms of their (approximate) expected prediction accuracy or the so-called Area Under the Curve (AUC). Minimizing the reciprocals of these measures are the goals of supervised learning. However, when the models are constructed by the means of empirical risk minimization (ERM), surrogate functions such as the logistic loss or hinge loss are optimized instead. In this work, we show that in the case of linear predictors, the expected error and the expected ranking loss can be effectively approximated by smooth functions whose closed form expressions and those of their first (and second) order derivatives depend on the first and second moments of the data distribution, which can be precomputed. Hence, the complexity of an optimization algorithm applied to these functions does not depend on the size of the training data. These approximation functions are derived under the assumption that the output of the linear classifier for a given data set has an approximately normal distribution. We argue that this assumption is significantly weaker than the Gaussian assumption on the data itself and we support this claim by demonstrating that our new approximation is quite accurate on data sets that are not necessarily Gaussian. We present computational results that show that our proposed approximations and related optimization algorithms can produce linear classifiers with similar or better test accuracy or AUC, than those obtained using state-of-the-art approaches, in a fraction of the time.
Active Metric Learning for Supervised Classification
Mar 28, 2018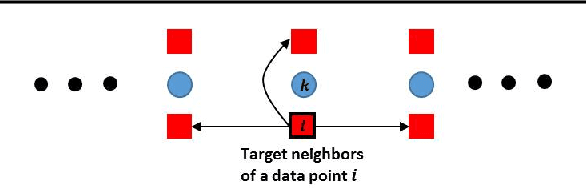
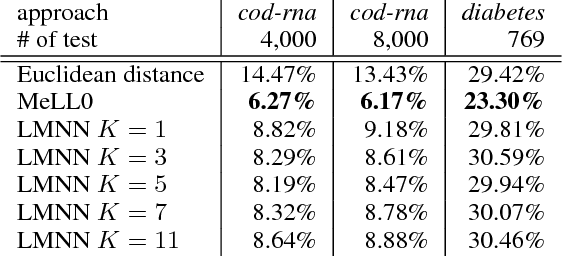
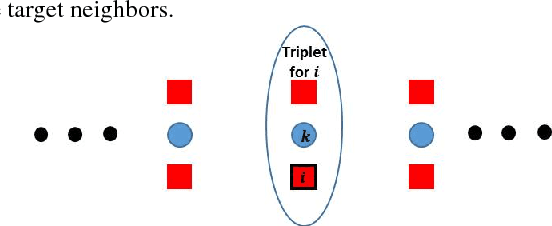
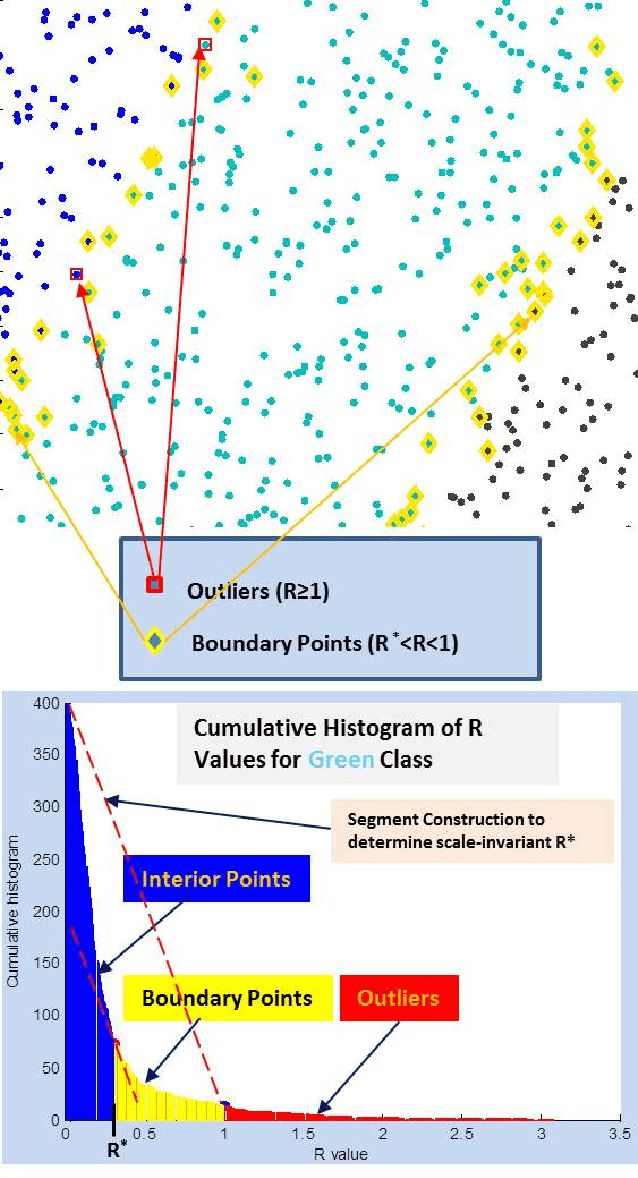
Clustering and classification critically rely on distance metrics that provide meaningful comparisons between data points. We present mixed-integer optimization approaches to find optimal distance metrics that generalize the Mahalanobis metric extensively studied in the literature. Additionally, we generalize and improve upon leading methods by removing reliance on pre-designated "target neighbors," "triplets," and "similarity pairs." Another salient feature of our method is its ability to enable active learning by recommending precise regions to sample after an optimal metric is computed to improve classification performance. This targeted acquisition can significantly reduce computational burden by ensuring training data completeness, representativeness, and economy. We demonstrate classification and computational performance of the algorithms through several simple and intuitive examples, followed by results on real image and medical datasets.