 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Maximum Likelihood Estimation for Real-time Generative Model Predictive Control
Mar 14, 2026Diffusion-based models have recently shown strong performance in trajectory planning, as they are capable of capturing diverse, multimodal distributions of complex behaviors. A key limitation of these models is their slow inference speed, which results from the iterative denoising process. This makes them less suitable for real-time applications such as closed-loop model predictive control (MPC), where plans must be generated quickly and adapted continuously to a changing environment. In this paper, we investigate Implicit Maximum Likelihood Estimation (IMLE) as an alternative generative modeling approach for planning. IMLE offers strong mode coverage while enabling inference that is two orders of magnitude faster, making it particularly well suited for real-time MPC tasks. Our results demonstrate that IMLE achieves competitive performance on standard offline reinforcement learning benchmarks compared to the standard diffusion-based planner, while substantially improving planning speed in both open-loop and closed-loop settings. We further validate IMLE in a closed-loop human navigation scenario, operating in real-time, demonstrating how it enables rapid and adaptive plan generation in dynamic environments.
Fast Confidence-Aware Human Prediction via Hardware-accelerated Bayesian Inference for Safe Robot Navigation
Mar 01, 2026As robots increasingly integrate into everyday environments, ensuring their safe navigation around humans becomes imperative. Efficient and safe motion planning requires robots to account for human behavior, particularly in constrained spaces such as grocery stores or care homes, where interactions with multiple individuals are common. Prior research has employed Bayesian frameworks to model human rationality based on navigational intent, enabling the prediction of probabilistic trajectories for planning purposes. In this work, we present a simple yet novel approach for confidence-aware prediction that treats future predictions as particles. This framework is highly parallelized and accelerated on an graphics processing unit (GPU). As a result, this enables longer-term predictions at a frequency of 125 Hz and can be easily extended for multi-human predictions. Compared to existing methods, our implementation supports finer prediction time steps, yielding more granular trajectory forecasts. This enhanced resolution allows motion planners to respond effectively to subtle changes in human behavior. We validate our approach through real-world experiments, demonstrating a robot safely navigating among multiple humans with diverse navigational goals. Our results highlight the methods potential for robust and efficient human-robot coexistence in dynamic environments.
Reach-Avoid Differential game with Reachability Analysis for UAVs: A decomposition approach
Dec 28, 2025Reach-avoid (RA) games have significant applications in security and defense, particularly for unmanned aerial vehicles (UAVs). These problems are inherently challenging due to the need to consider obstacles, consider the adversarial nature of opponents, ensure optimality, and account for nonlinear dynamics. Hamilton-Jacobi (HJ) reachability analysis has emerged as a powerful tool for tackling these challenges; however, while it has been applied to games involving two spatial dimensions, directly extending this approach to three spatial dimensions is impossible due to high dimensionality. On the other hand, alternative approaches for solving RA games lack the generality to consider games with three spatial dimensions involving agents with non-trivial system dynamics. In this work, we propose a novel framework for dimensionality reduction by decomposing the problem into a horizontal RA sub-game and a vertical RA sub-game. We then solve each sub-game using HJ reachability analysis and consider second-order dynamics that account for the defender's acceleration. To reconstruct the solution to the original RA game from the sub-games, we introduce a HJ-based tracking control algorithm in each sub-game that not only guarantees capture of the attacker but also tracking of the attacker thereafter. We prove the conditions under which the capture guarantees are maintained. The effectiveness of our approach is demonstrated via numerical simulations, showing that the decomposition maintains optimality and guarantees in the original problem. Our methods are also validated in a Gazebo physics simulator, achieving successful capture of quadrotors in three spatial dimensions space for the first time to the best of our knowledge.
An Effective Deep Network for Head Pose Estimation without Keypoints
Oct 25, 2022



Human head pose estimation is an essential problem in facial analysis in recent years that has a lot of computer vision applications such as gaze estimation, virtual reality, and driver assistance. Because of the importance of the head pose estimation problem, it is necessary to design a compact model to resolve this task in order to reduce the computational cost when deploying on facial analysis-based applications such as large camera surveillance systems, AI cameras while maintaining accuracy. In this work, we propose a lightweight model that effectively addresses the head pose estimation problem. Our approach has two main steps. 1) We first train many teacher models on the synthesis dataset - 300W-LPA to get the head pose pseudo labels. 2) We design an architecture with the ResNet18 backbone and train our proposed model with the ensemble of these pseudo labels via the knowledge distillation process. To evaluate the effectiveness of our model, we use AFLW-2000 and BIWI - two real-world head pose datasets. Experimental results show that our proposed model significantly improves the accuracy in comparison with the state-of-the-art head pose estimation methods. Furthermore, our model has the real-time speed of $\sim$300 FPS when inferring on Tesla V100.
Real-Time Formal Verification of Autonomous Systems With An FPGA
Dec 07, 2020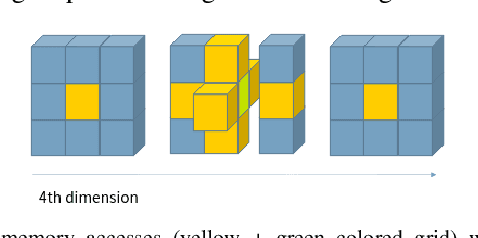
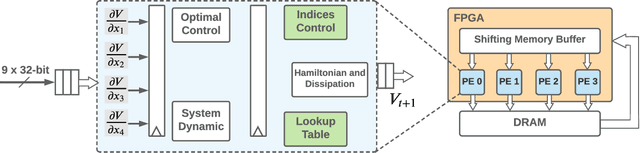
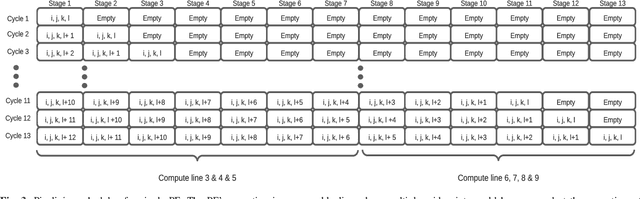
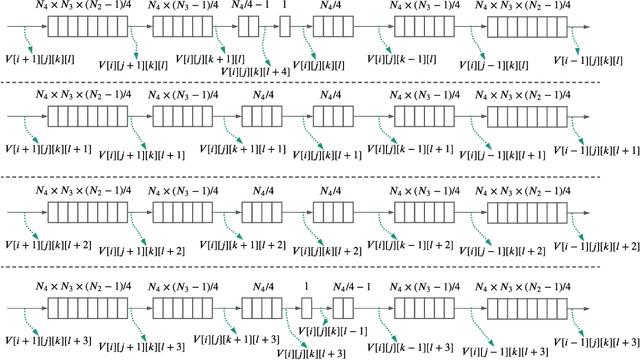
Hamilton-Jacobi reachability analysis is a powerful technique used to verify the safety of autonomous systems. This method is very good at handling non-linear system dynamics with disturbances and flexible set representations. A drawback to this approach is that it suffers from the curse of dimensionality, which prevents real-time deployment on safety-critical systems. In this paper, we show that a customized hardware design on a Field Programmable Gate Array (FPGA) could accelerate 4D grid-based Hamilton-Jacobi (HJ) reachability analysis up to 16 times compared to an optimized implementation and 142 times compared to MATLAB ToolboxLS on a 16-thread CPU. Our design can overcome the complex data access pattern while taking advantage of the parallel nature of the HJ PDE computation. Because of this, we are able to achieve real-time formal verification with a 4D car model by re-solving the HJ PDE at a frequency of 5Hz on the FPGA as the environment changes. The latency of our computation is deterministic, which is crucial for safetycritical systems. Our approach presented here can be applied to different systems dynamics, and moreover, potentially leveraged for higher dimensions systems. We also demonstrate obstacle avoidance with a robot car in a changing environment.