 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEOS-Bench: A Comprehensive Benchmark for Earth Observation Satellite Scheduling
Apr 28, 2026Earth observation satellite imaging scheduling is a challenging NP-hard combinatorial optimisation problem central to space mission operations. While next-generation agile Earth observation satellites (EOS) increase operational flexibility, they also significantly raise scheduling complexity. The lack of a unified, open-source benchmark makes it difficult to compare algorithms across studies. This paper introduces EOS-Bench, a comprehensive framework for systematic and reproducible evaluation of scheduling methods. By integrating high-fidelity orbital dynamics and platform constraints, EOS-Bench generates 1,390 scenarios and 13,900 benchmark instances, spanning from small-scale validation cases to large coordination problems with up to 1,000 satellites and 10,000 requests. We further propose a scenario characterisation scheme to quantify structural difficulty based on factors such as opportunity density, task flexibility, conflict intensity, and satellite congestion. A multidimensional evaluation protocol is introduced, assessing performance across five metrics: task profit, completion rate, workload balance, timeliness, and runtime. The framework is evaluated using mixed-integer programming, heuristics, meta-heuristics, and deep reinforcement learning across both agile and non-agile settings. Results show that EOS-Bench effectively distinguishes solver performance across scales and conditions, revealing trade-offs between solution quality and computational efficiency, and providing deeper insight into scenario complexity. EOS-Bench offers a unified and extensible open testbed for advancing research in Earth observation satellite scheduling. The code and data are available at https://github.com/Ethan19YQ/EOS-Bench.
Generalized Moving Peaks Benchmark
Jun 11, 2021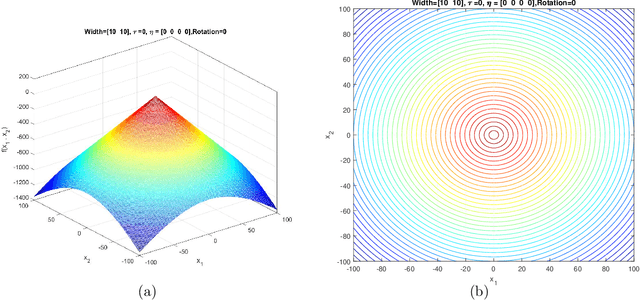
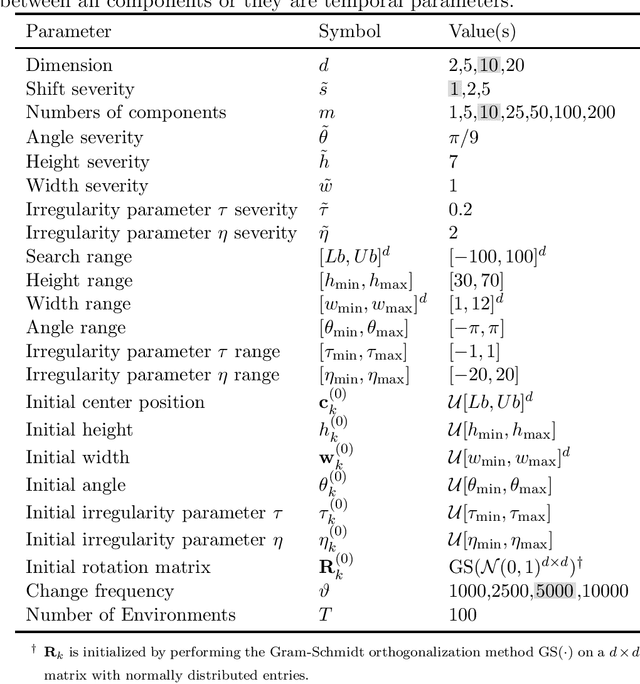
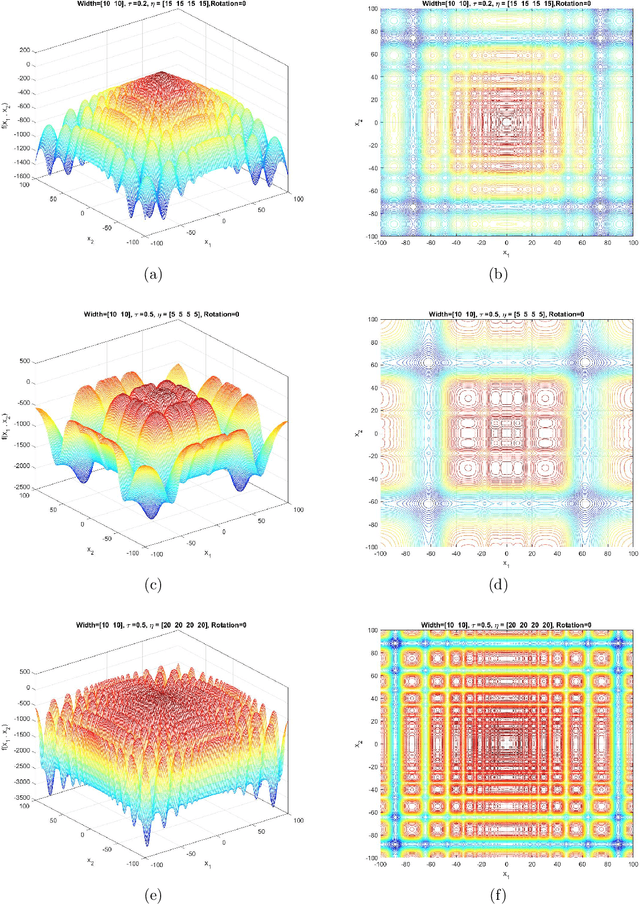
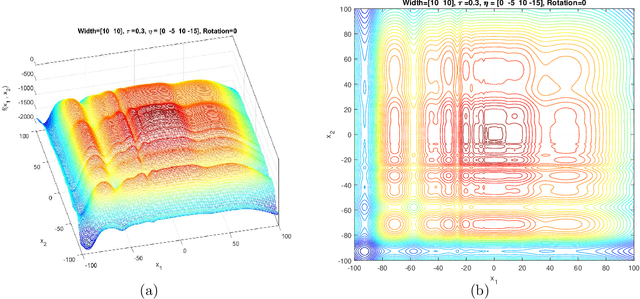
This document describes the Generalized Moving Peaks Benchmark (GMPB) that generates continuous dynamic optimization problem instances. The landscapes generated by GMPB are constructed by assembling several components with a variety of controllable characteristics ranging from unimodal to highly multimodal, symmetric to highly asymmetric, smooth to highly irregular, and various degrees of variable interaction and ill-conditioning. In this document, we explain how these characteristics can be generated by different parameter settings of GMPB. The MATLAB source code of GMPB is also explained. This document forms the basis for a range of competitions on Evolutionary Continuous Dynamic Optimization in the upcoming well-known conferences.