 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023



While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
An Ethical Trajectory Planning Algorithm for Autonomous Vehicles
Dec 16, 2022With the rise of AI and automation, moral decisions are being put into the hands of algorithms that were formerly the preserve of humans. In autonomous driving, a variety of such decisions with ethical implications are made by algorithms for behavior and trajectory planning. Therefore, we present an ethical trajectory planning algorithm with a framework that aims at a fair distribution of risk among road users. Our implementation incorporates a combination of five essential ethical principles: minimization of the overall risk, priority for the worst-off, equal treatment of people, responsibility, and maximum acceptable risk. To the best of the authors' knowledge, this is the first ethical algorithm for trajectory planning of autonomous vehicles in line with the 20 recommendations from the EU Commission expert group and with general applicability to various traffic situations. We showcase the ethical behavior of our algorithm in selected scenarios and provide an empirical analysis of the ethical principles in 2000 scenarios. The code used in this research is available as open-source software.
MixNet: Structured Deep Neural Motion Prediction for Autonomous Racing
Aug 03, 2022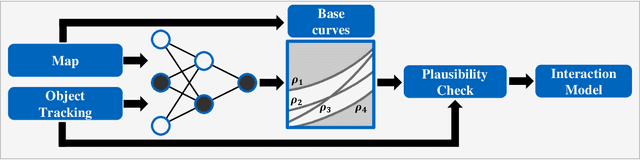
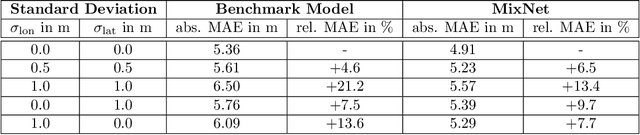

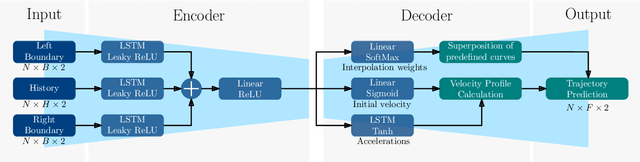
Reliably predicting the motion of contestant vehicles surrounding an autonomous racecar is crucial for effective and performant planning. Although highly expressive, deep neural networks are black-box models, making their usage challenging in safety-critical applications, such as autonomous driving. In this paper, we introduce a structured way of forecasting the movement of opposing racecars with deep neural networks. The resulting set of possible output trajectories is constrained. Hence quality guarantees about the prediction can be given. We report the performance of the model by evaluating it together with an LSTM-based encoder-decoder architecture on data acquired from high-fidelity Hardware-in-the-Loop simulations. The proposed approach outperforms the baseline regarding the prediction accuracy but still fulfills the quality guarantees. Thus, a robust real-world application of the model is proven. The presented model was deployed on the racecar of the Technical University of Munich for the Indy Autonomous Challenge 2021. The code used in this research is available as open-source software at www.github.com/TUMFTM/MixNet.
TUM Autonomous Motorsport: An Autonomous Racing Software for the Indy Autonomous Challenge
May 31, 2022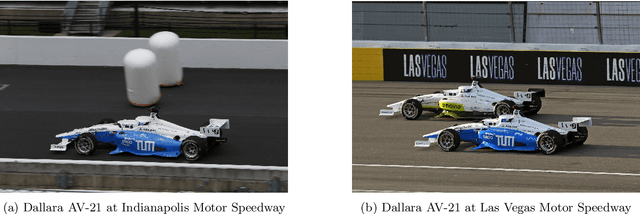
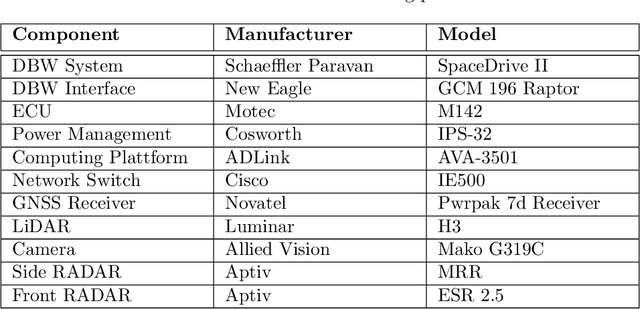
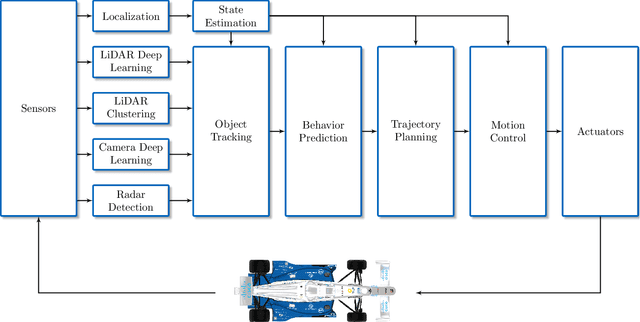
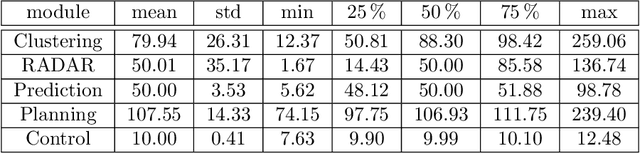
For decades, motorsport has been an incubator for innovations in the automotive sector and brought forth systems like disk brakes or rearview mirrors. Autonomous racing series such as Roborace, F1Tenth, or the Indy Autonomous Challenge (IAC) are envisioned as playing a similar role within the autonomous vehicle sector, serving as a proving ground for new technology at the limits of the autonomous systems capabilities. This paper outlines the software stack and approach of the TUM Autonomous Motorsport team for their participation in the Indy Autonomous Challenge, which holds two competitions: A single-vehicle competition on the Indianapolis Motor Speedway and a passing competition at the Las Vegas Motor Speedway. Nine university teams used an identical vehicle platform: A modified Indy Lights chassis equipped with sensors, a computing platform, and actuators. All the teams developed different algorithms for object detection, localization, planning, prediction, and control of the race cars. The team from TUM placed first in Indianapolis and secured second place in Las Vegas. During the final of the passing competition, the TUM team reached speeds and accelerations close to the limit of the vehicle, peaking at around 270 km/h and 28 ms2. This paper will present details of the vehicle hardware platform, the developed algorithms, and the workflow to test and enhance the software applied during the two-year project. We derive deep insights into the autonomous vehicle's behavior at high speed and high acceleration by providing a detailed competition analysis. Based on this, we deduce a list of lessons learned and provide insights on promising areas of future work based on the real-world evaluation of the displayed concepts.
Indy Autonomous Challenge -- Autonomous Race Cars at the Handling Limits
Feb 08, 2022
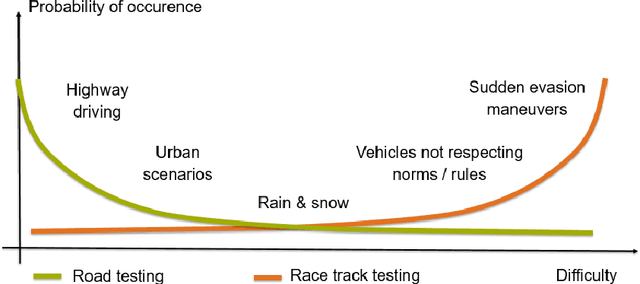
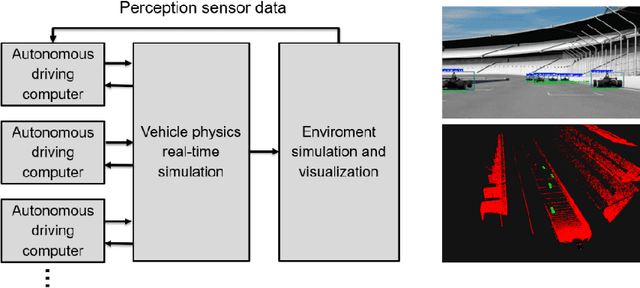
Motorsport has always been an enabler for technological advancement, and the same applies to the autonomous driving industry. The team TUM Auton-omous Motorsports will participate in the Indy Autonomous Challenge in Octo-ber 2021 to benchmark its self-driving software-stack by racing one out of ten autonomous Dallara AV-21 racecars at the Indianapolis Motor Speedway. The first part of this paper explains the reasons for entering an autonomous vehicle race from an academic perspective: It allows focusing on several edge cases en-countered by autonomous vehicles, such as challenging evasion maneuvers and unstructured scenarios. At the same time, it is inherently safe due to the motor-sport related track safety precautions. It is therefore an ideal testing ground for the development of autonomous driving algorithms capable of mastering the most challenging and rare situations. In addition, we provide insight into our soft-ware development workflow and present our Hardware-in-the-Loop simulation setup. It is capable of running simulations of up to eight autonomous vehicles in real time. The second part of the paper gives a high-level overview of the soft-ware architecture and covers our development priorities in building a high-per-formance autonomous racing software: maximum sensor detection range, relia-ble handling of multi-vehicle situations, as well as reliable motion control under uncertainty.
A Deep Learning-based Radar and Camera Sensor Fusion Architecture for Object Detection
May 15, 2020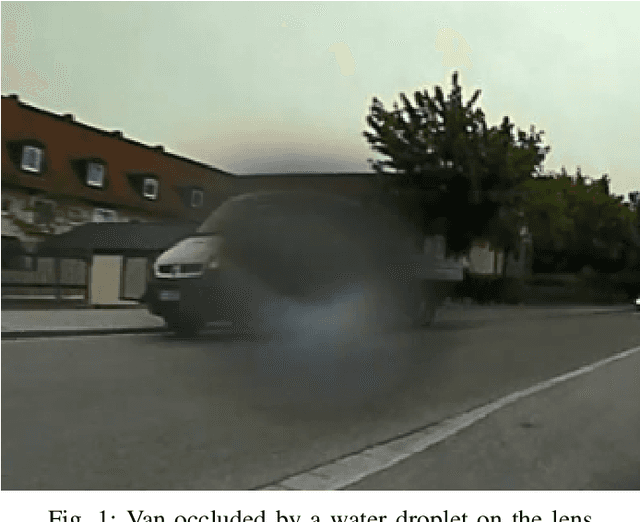
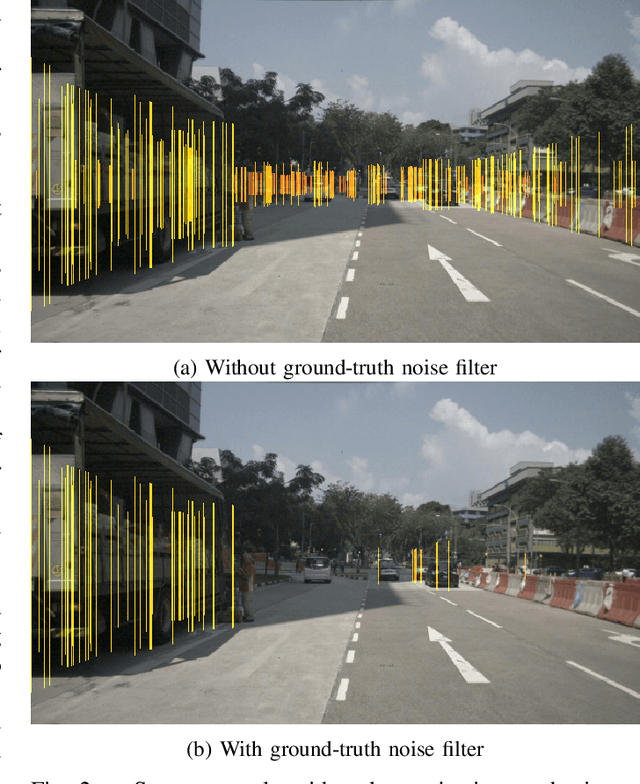
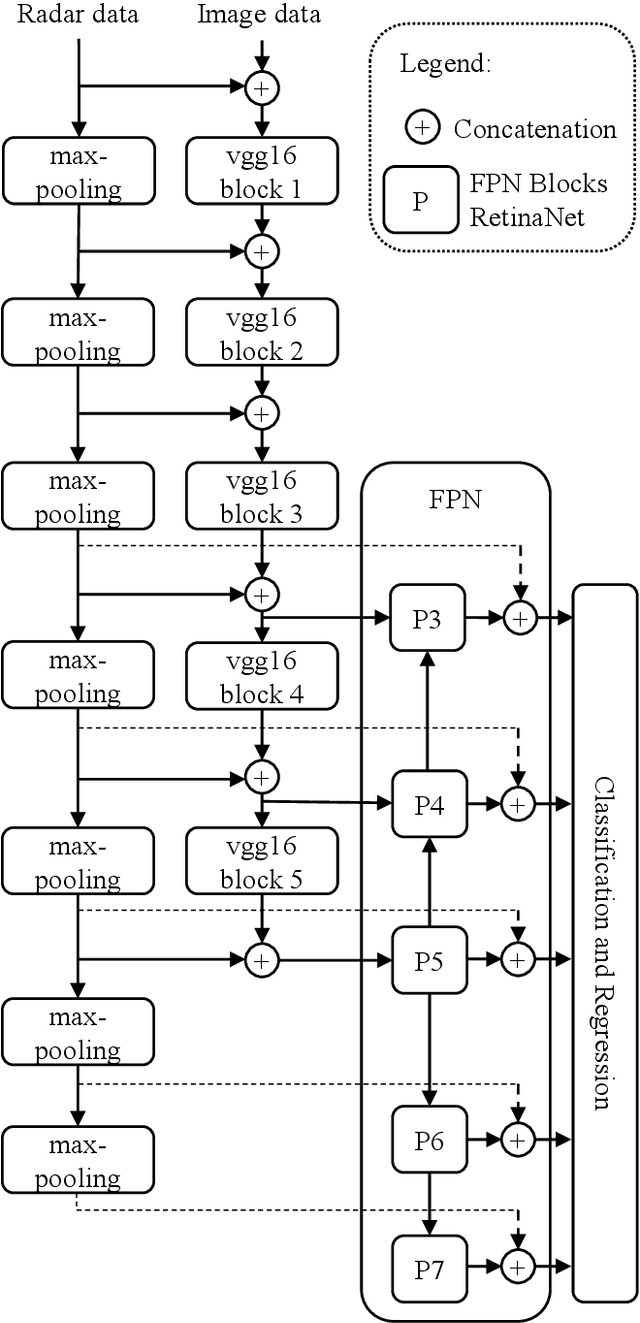
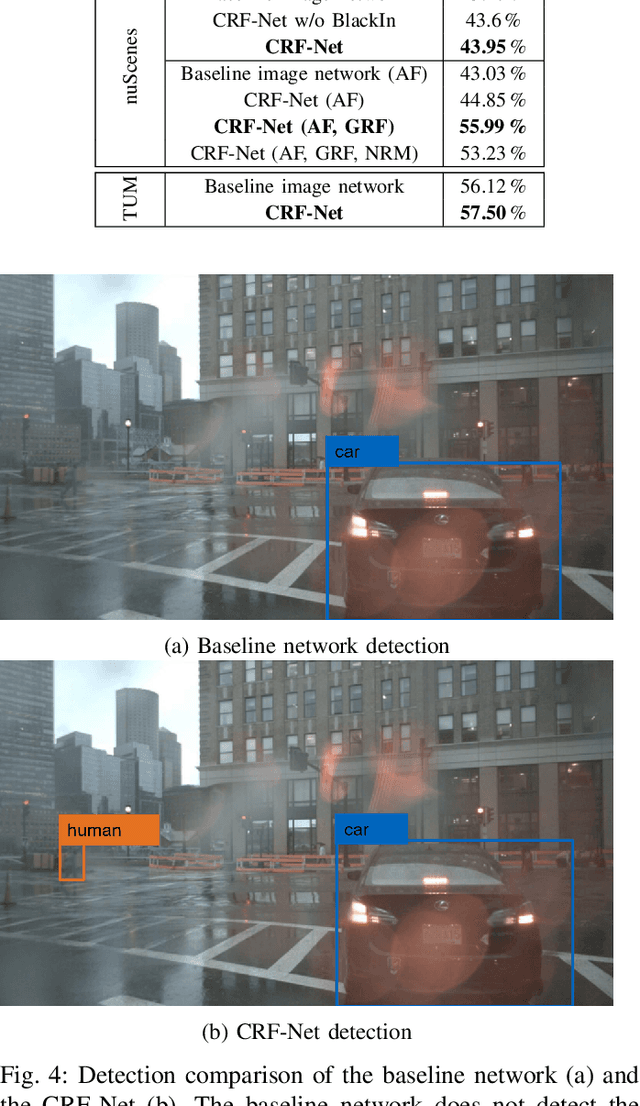
Object detection in camera images, using deep learning has been proven successfully in recent years. Rising detection rates and computationally efficient network structures are pushing this technique towards application in production vehicles. Nevertheless, the sensor quality of the camera is limited in severe weather conditions and through increased sensor noise in sparsely lit areas and at night. Our approach enhances current 2D object detection networks by fusing camera data and projected sparse radar data in the network layers. The proposed CameraRadarFusionNet (CRF-Net) automatically learns at which level the fusion of the sensor data is most beneficial for the detection result. Additionally, we introduce BlackIn, a training strategy inspired by Dropout, which focuses the learning on a specific sensor type. We show that the fusion network is able to outperform a state-of-the-art image-only network for two different datasets. The code for this research will be made available to the public at: https://github.com/TUMFTM/CameraRadarFusionNet.