 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Impact of Hard Adversarial Instances on Overfitting in Adversarial Training
Dec 14, 2021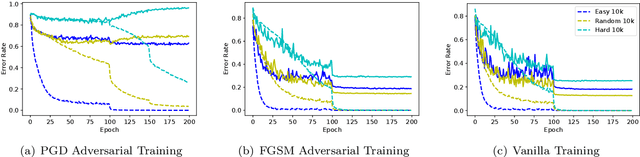

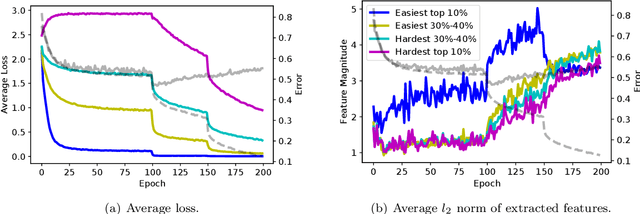
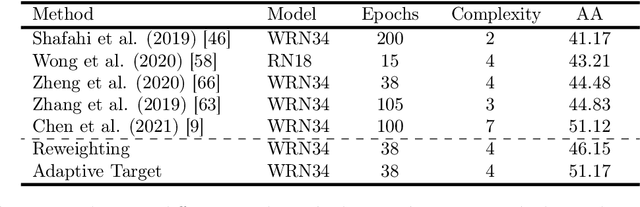
Adversarial training is a popular method to robustify models against adversarial attacks. However, it exhibits much more severe overfitting than training on clean inputs. In this work, we investigate this phenomenon from the perspective of training instances, i.e., training input-target pairs. Based on a quantitative metric measuring instances' difficulty, we analyze the model's behavior on training instances of different difficulty levels. This lets us show that the decay in generalization performance of adversarial training is a result of the model's attempt to fit hard adversarial instances. We theoretically verify our observations for both linear and general nonlinear models, proving that models trained on hard instances have worse generalization performance than ones trained on easy instances. Furthermore, we prove that the difference in the generalization gap between models trained by instances of different difficulty levels increases with the size of the adversarial budget. Finally, we conduct case studies on methods mitigating adversarial overfitting in several scenarios. Our analysis shows that methods successfully mitigating adversarial overfitting all avoid fitting hard adversarial instances, while ones fitting hard adversarial instances do not achieve true robustness.
Adversarial Parametric Pose Prior
Dec 08, 2021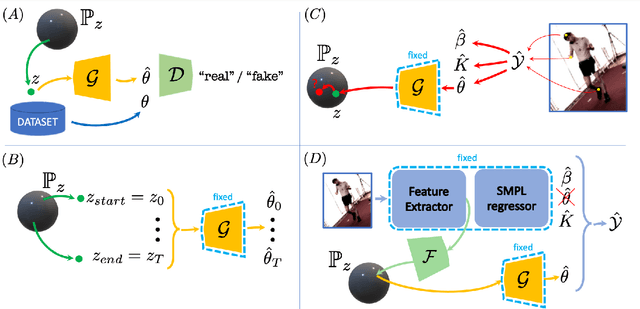
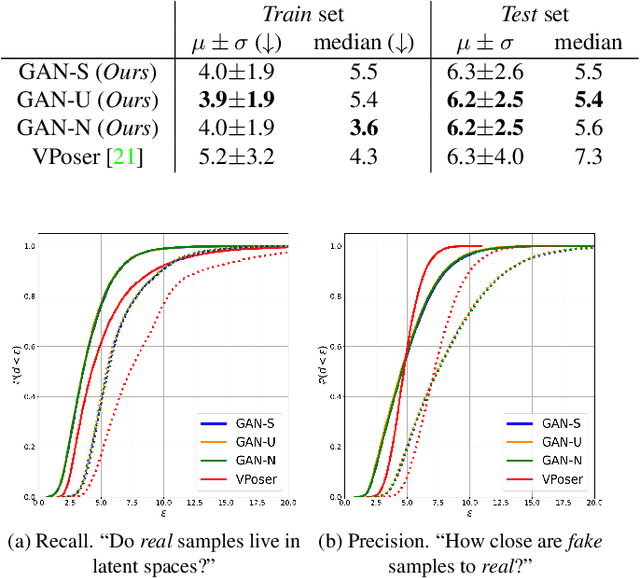
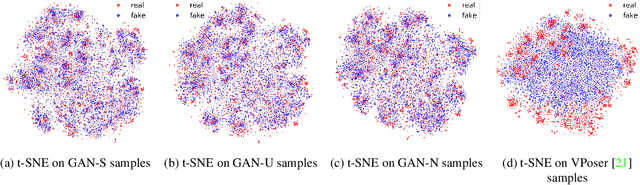
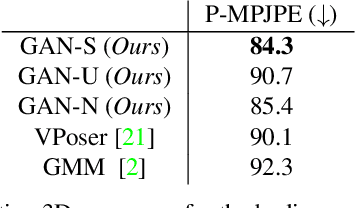
The Skinned Multi-Person Linear (SMPL) model can represent a human body by mapping pose and shape parameters to body meshes. This has been shown to facilitate inferring 3D human pose and shape from images via different learning models. However, not all pose and shape parameter values yield physically-plausible or even realistic body meshes. In other words, SMPL is under-constrained and may thus lead to invalid results when used to reconstruct humans from images, either by directly optimizing its parameters, or by learning a mapping from the image to these parameters. In this paper, we therefore learn a prior that restricts the SMPL parameters to values that produce realistic poses via adversarial training. We show that our learned prior covers the diversity of the real-data distribution, facilitates optimization for 3D reconstruction from 2D keypoints, and yields better pose estimates when used for regression from images. We found that the prior based on spherical distribution gets the best results. Furthermore, in all these tasks, it outperforms the state-of-the-art VAE-based approach to constraining the SMPL parameters.
Dyadic Human Motion Prediction
Dec 01, 2021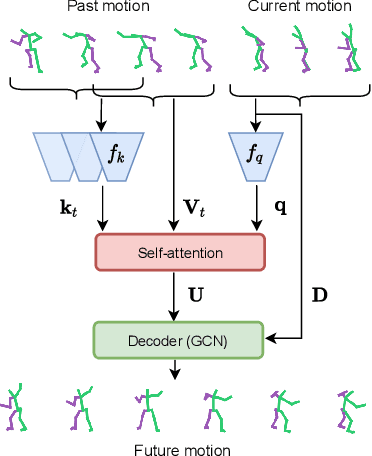
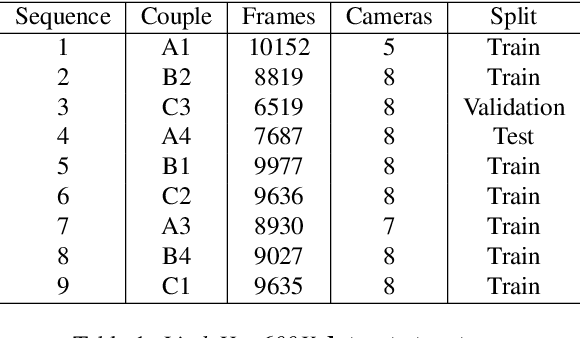
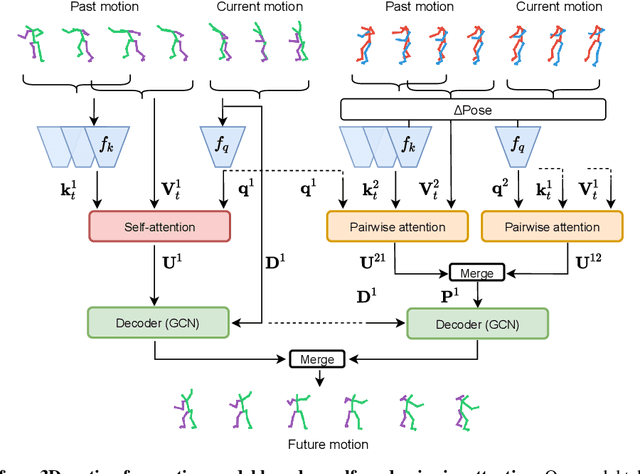

Prior work on human motion forecasting has mostly focused on predicting the future motion of single subjects in isolation from their past pose sequence. In the presence of closely interacting people, however, this strategy fails to account for the dependencies between the different subject's motions. In this paper, we therefore introduce a motion prediction framework that explicitly reasons about the interactions of two observed subjects. Specifically, we achieve this by introducing a pairwise attention mechanism that models the mutual dependencies in the motion history of the two subjects. This allows us to preserve the long-term motion dynamics in a more realistic way and more robustly predict unusual and fast-paced movements, such as the ones occurring in a dance scenario. To evaluate this, and because no existing motion prediction datasets depict two closely-interacting subjects, we introduce the LindyHop600K dance dataset. Our results evidence that our approach outperforms the state-of-the-art single person motion prediction techniques.
What Stops Learning-based 3D Registration from Working in the Real World?
Nov 19, 2021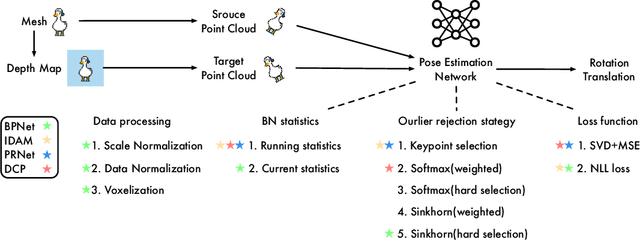


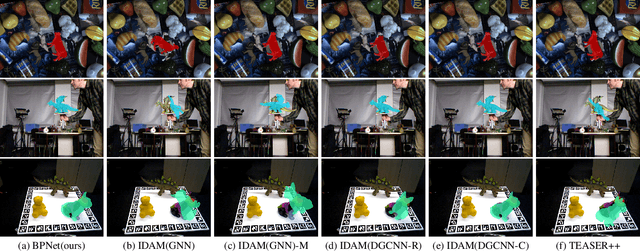
Much progress has been made on the task of learning-based 3D point cloud registration, with existing methods yielding outstanding results on standard benchmarks, such as ModelNet40, even in the partial-to-partial matching scenario. Unfortunately, these methods still struggle in the presence of real data. In this work, we identify the sources of these failures, analyze the reasons behind them, and propose solutions to tackle them. We summarise our findings into a set of guidelines and demonstrate their effectiveness by applying them to different baseline methods, DCP and IDAM. In short, our guidelines improve both their training convergence and testing accuracy. Ultimately, this translates to a best-practice 3D registration network (BPNet), constituting the first learning-based method able to handle previously-unseen objects in real-world data. Despite being trained only on synthetic data, our model generalizes to real data without any fine-tuning, reaching an accuracy of up to 67% on point clouds of unseen objects obtained with a commercial sensor.
Temporally-Consistent Surface Reconstruction using Metrically-Consistent Atlases
Nov 12, 2021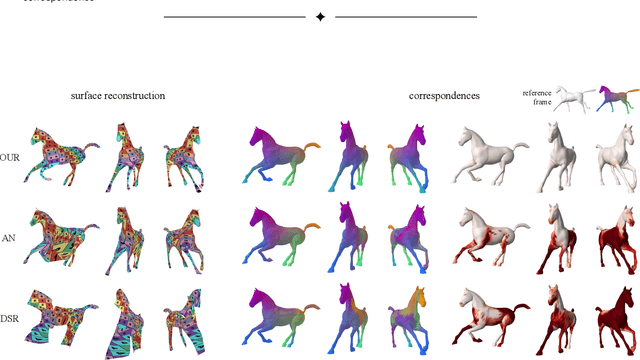
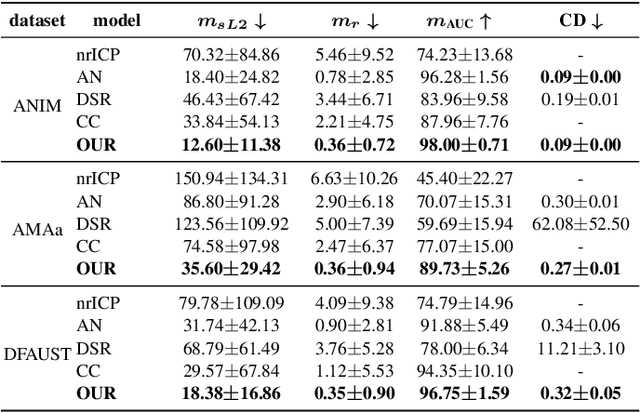
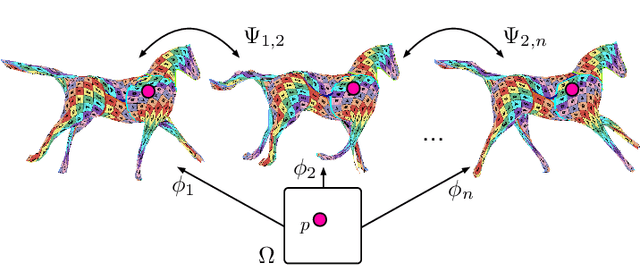
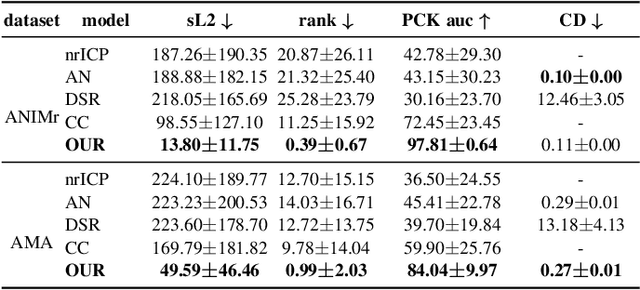
We propose a method for unsupervised reconstruction of a temporally-consistent sequence of surfaces from a sequence of time-evolving point clouds. It yields dense and semantically meaningful correspondences between frames. We represent the reconstructed surfaces as atlases computed by a neural network, which enables us to establish correspondences between frames. The key to making these correspondences semantically meaningful is to guarantee that the metric tensors computed at corresponding points are as similar as possible. We have devised an optimization strategy that makes our method robust to noise and global motions, without a priori correspondences or pre-alignment steps. As a result, our approach outperforms state-of-the-art ones on several challenging datasets. The code is available at https://github.com/bednarikjan/temporally_coherent_surface_reconstruction.
Estimating Image Depth in the Comics Domain
Oct 07, 2021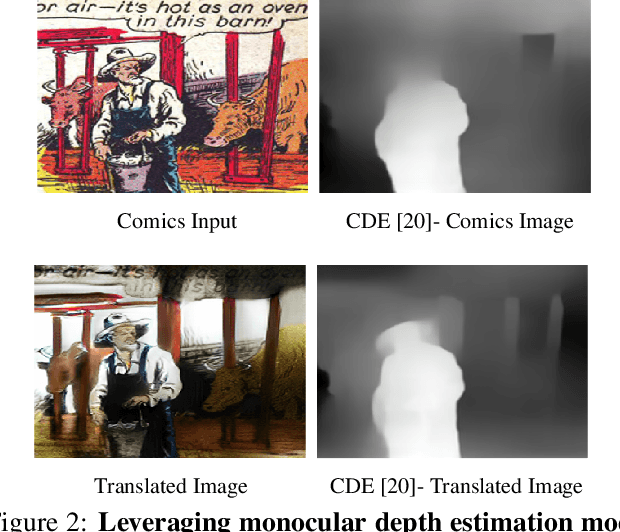
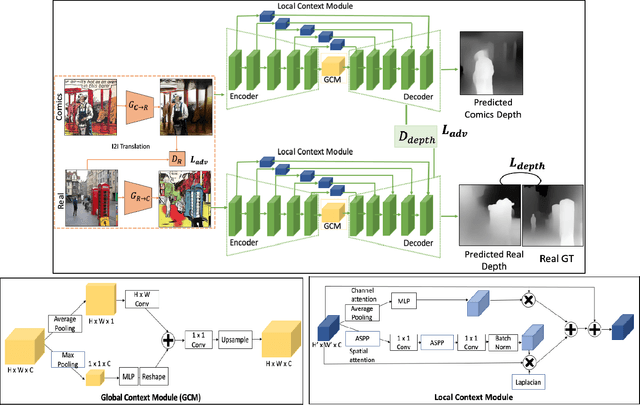
Estimating the depth of comics images is challenging as such images a) are monocular; b) lack ground-truth depth annotations; c) differ across different artistic styles; d) are sparse and noisy. We thus, use an off-the-shelf unsupervised image to image translation method to translate the comics images to natural ones and then use an attention-guided monocular depth estimator to predict their depth. This lets us leverage the depth annotations of existing natural images to train the depth estimator. Furthermore, our model learns to distinguish between text and images in the comics panels to reduce text-based artefacts in the depth estimates. Our method consistently outperforms the existing state-ofthe-art approaches across all metrics on both the DCM and eBDtheque images. Finally, we introduce a dataset to evaluate depth prediction on comics.
An Analysis of Super-Net Heuristics in Weight-Sharing NAS
Oct 04, 2021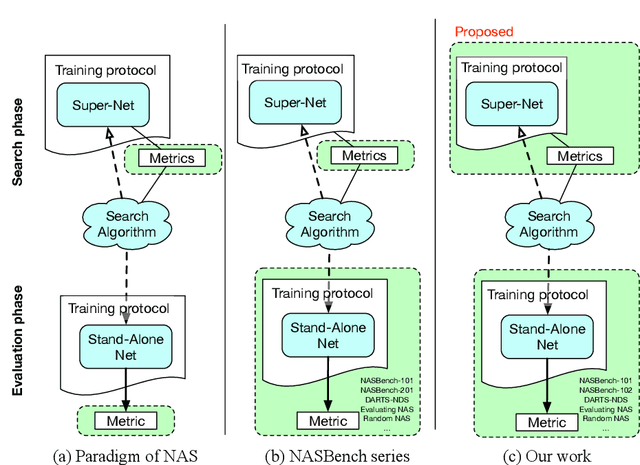
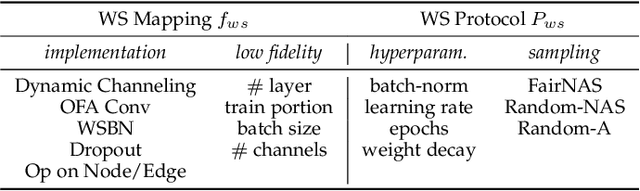
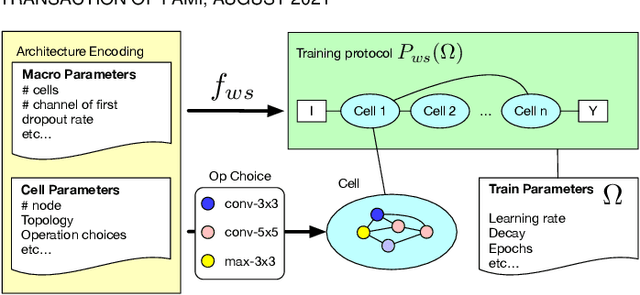
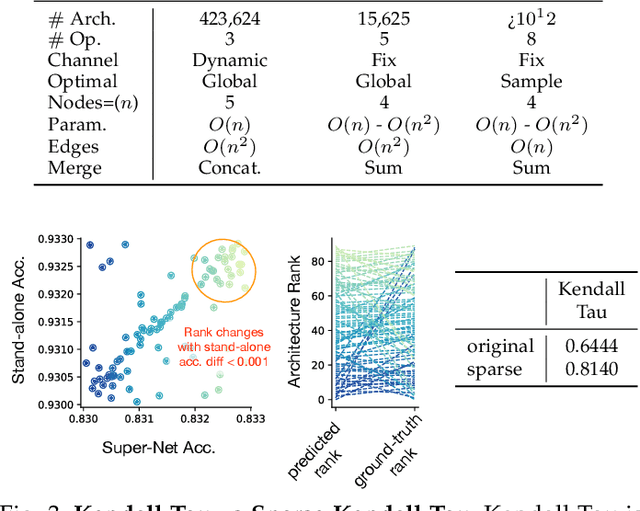
Weight sharing promises to make neural architecture search (NAS) tractable even on commodity hardware. Existing methods in this space rely on a diverse set of heuristics to design and train the shared-weight backbone network, a.k.a. the super-net. Since heuristics substantially vary across different methods and have not been carefully studied, it is unclear to which extent they impact super-net training and hence the weight-sharing NAS algorithms. In this paper, we disentangle super-net training from the search algorithm, isolate 14 frequently-used training heuristics, and evaluate them over three benchmark search spaces. Our analysis uncovers that several commonly-used heuristics negatively impact the correlation between super-net and stand-alone performance, whereas simple, but often overlooked factors, such as proper hyper-parameter settings, are key to achieve strong performance. Equipped with this knowledge, we show that simple random search achieves competitive performance to complex state-of-the-art NAS algorithms when the super-net is properly trained.
Generating Smooth Pose Sequences for Diverse Human Motion Prediction
Aug 21, 2021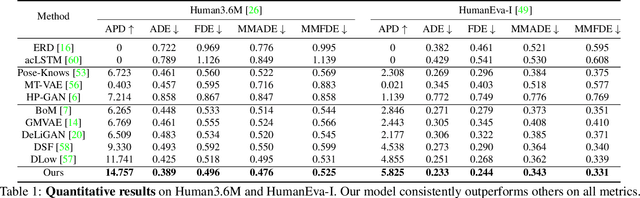
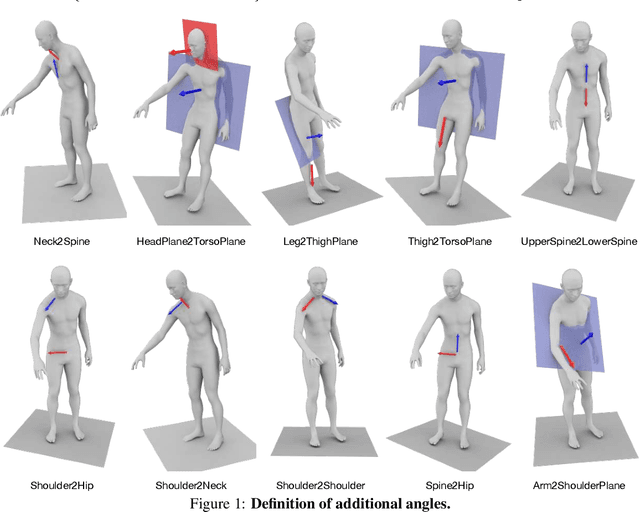
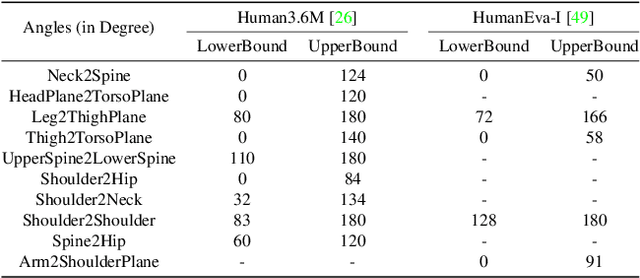
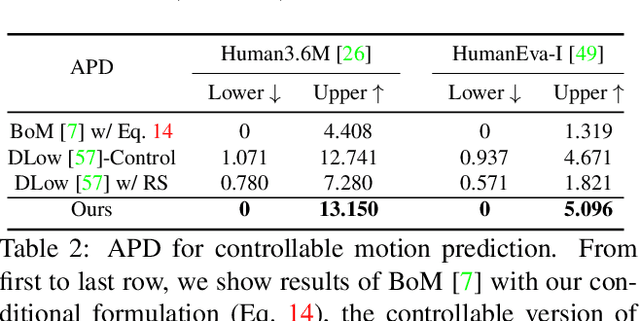
Recent progress in stochastic motion prediction, i.e., predicting multiple possible future human motions given a single past pose sequence, has led to producing truly diverse future motions and even providing control over the motion of some body parts. However, to achieve this, the state-of-the-art method requires learning several mappings for diversity and a dedicated model for controllable motion prediction. In this paper, we introduce a unified deep generative network for both diverse and controllable motion prediction. To this end, we leverage the intuition that realistic human motions consist of smooth sequences of valid poses, and that, given limited data, learning a pose prior is much more tractable than a motion one. We therefore design a generator that predicts the motion of different body parts sequentially, and introduce a normalizing flow based pose prior, together with a joint angle loss, to achieve motion realism.Our experiments on two standard benchmark datasets, Human3.6M and HumanEva-I, demonstrate that our approach outperforms the state-of-the-art baselines in terms of both sample diversity and accuracy. The code is available at https://github.com/wei-mao-2019/gsps
Multi-level Motion Attention for Human Motion Prediction
Jun 17, 2021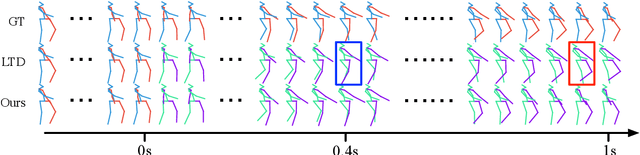
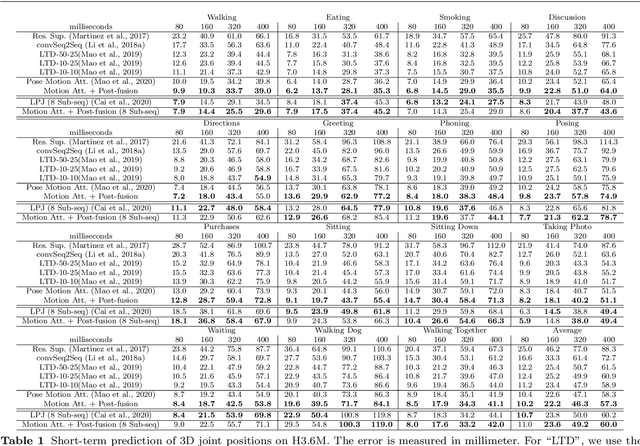
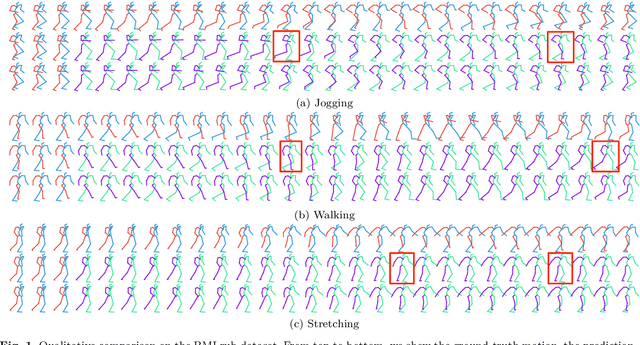

Human motion prediction aims to forecast future human poses given a historical motion. Whether based on recurrent or feed-forward neural networks, existing learning based methods fail to model the observation that human motion tends to repeat itself, even for complex sports actions and cooking activities. Here, we introduce an attention based feed-forward network that explicitly leverages this observation. In particular, instead of modeling frame-wise attention via pose similarity, we propose to extract motion attention to capture the similarity between the current motion context and the historical motion sub-sequences. In this context, we study the use of different types of attention, computed at joint, body part, and full pose levels. Aggregating the relevant past motions and processing the result with a graph convolutional network allows us to effectively exploit motion patterns from the long-term history to predict the future poses. Our experiments on Human3.6M, AMASS and 3DPW validate the benefits of our approach for both periodical and non-periodical actions. Thanks to our attention model, it yields state-of-the-art results on all three datasets. Our code is available at https://github.com/wei-mao-2019/HisRepItself.
Attention-based Domain Adaptation for Single Stage Detectors
Jun 14, 2021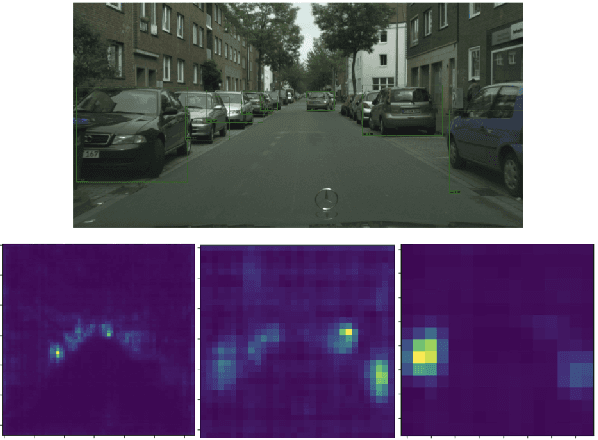
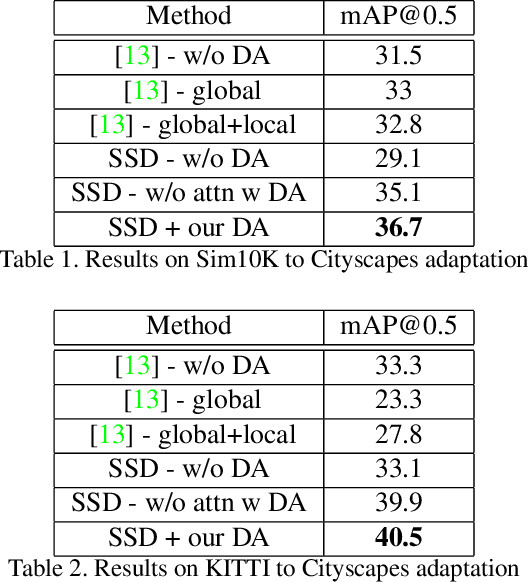
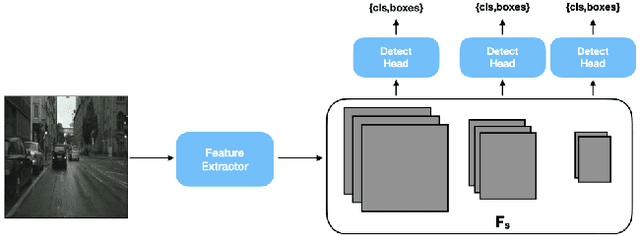
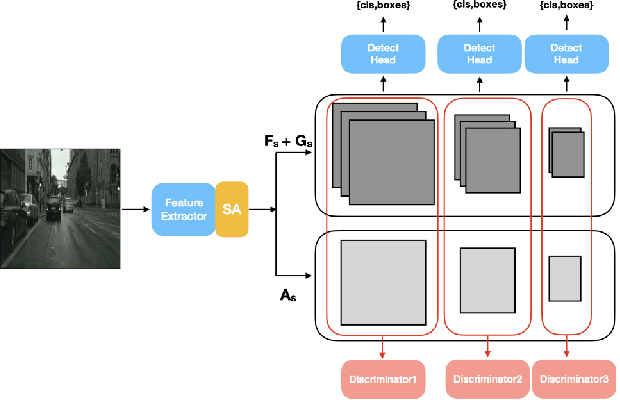
While domain adaptation has been used to improve the performance of object detectors when the training and test data follow different distributions, previous work has mostly focused on two-stage detectors. This is because their use of region proposals makes it possible to perform local adaptation, which has been shown to significantly improve the adaptation effectiveness. Here, by contrast, we target single-stage architectures, which are better suited to resource-constrained detection than two-stage ones but do not provide region proposals. To nonetheless benefit from the strength of local adaptation, we introduce an attention mechanism that lets us identify the important regions on which adaptation should focus. Our approach is generic and can be integrated into any single-stage detector. We demonstrate this on standard benchmark datasets by applying it to both SSD and YOLO. Furthermore, for an equivalent single-stage architecture, our method outperforms the state-of-the-art domain adaptation technique even though it was designed specifically for this particular detector.