 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRolling in the Deep -- Hybrid Locomotion for Wheeled-Legged Robots using Online Trajectory Optimization
Sep 16, 2019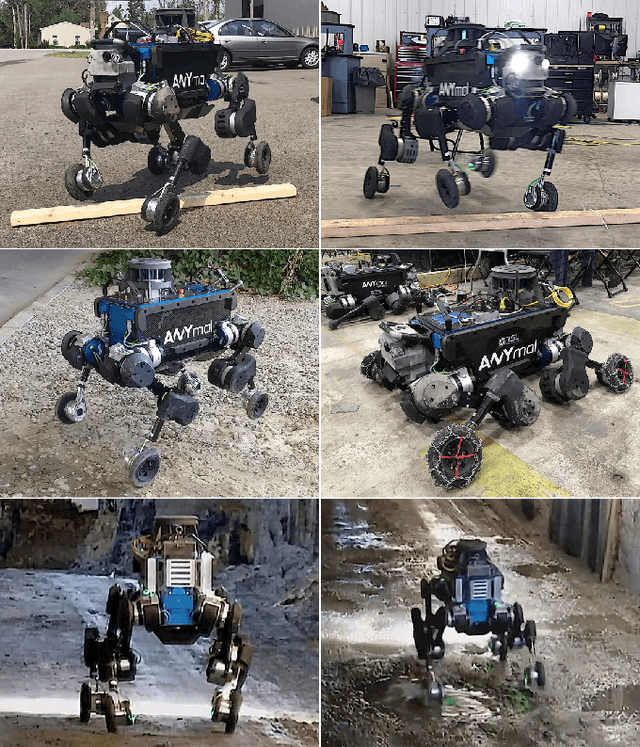
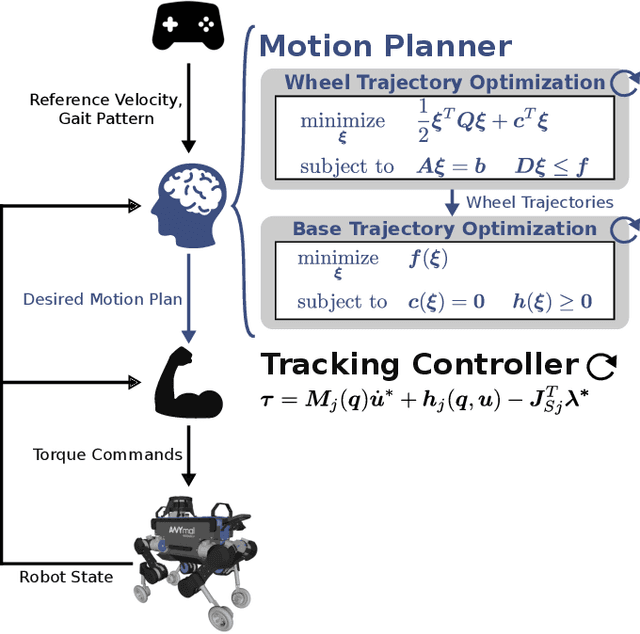
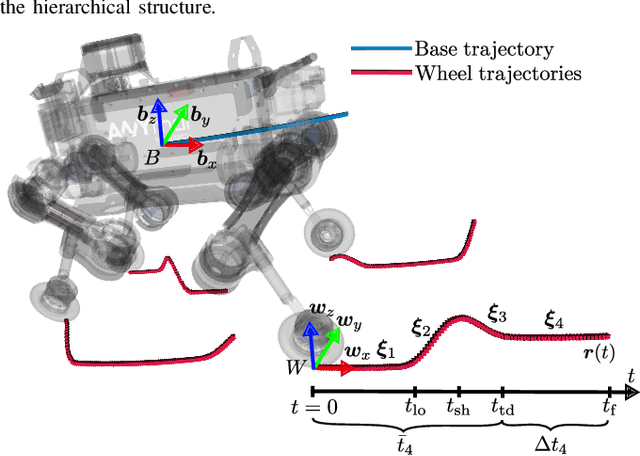
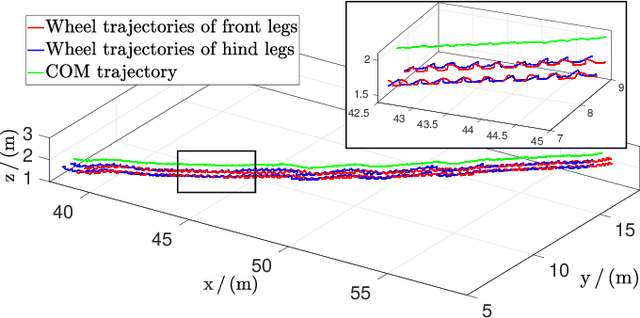
Wheeled-legged robots have the potential for highly agile and versatile locomotion. The combination of legs and wheels might be a solution for any real-world application requiring rapid, and long-distance mobility skills on challenging terrain. In this paper, we present an online trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking-driving locomotion strategies. By breaking down the optimization problem into a wheel and base trajectory planning, locomotion planning for high dimensional wheeled-legged robots becomes more tractable, can be solved in real-time on-board in a model predictive control fashion, and becomes robust against unpredicted disturbances. The reference motions are tracked by a hierarchical whole-body controller that sends torque commands to the robot. Our approach is verified on a quadrupedal robot that is fully torque-controlled, including the non-steerable wheels attached to its legs. The robot performs hybrid locomotion with different gait sequences on flat and rough terrain. In addition, we validated the robotic platform at the Defense Advanced Research Projects Agency (DARPA) Subterranean Challenge, where the robot rapidly maps, navigates, and explores dynamic underground environments.
Keep Rollin' - Whole-Body Motion Control and Planning for Wheeled Quadrupedal Robots
Feb 07, 2019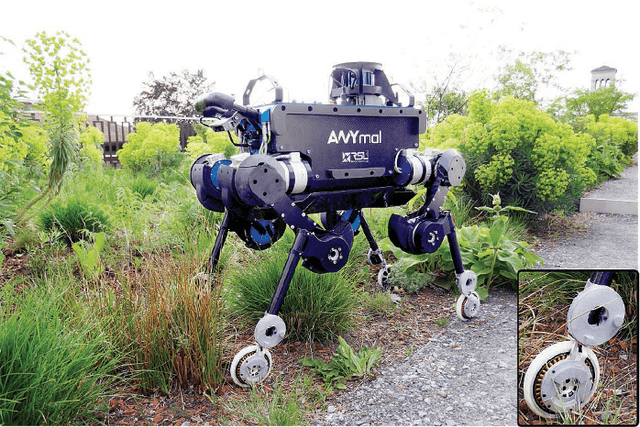
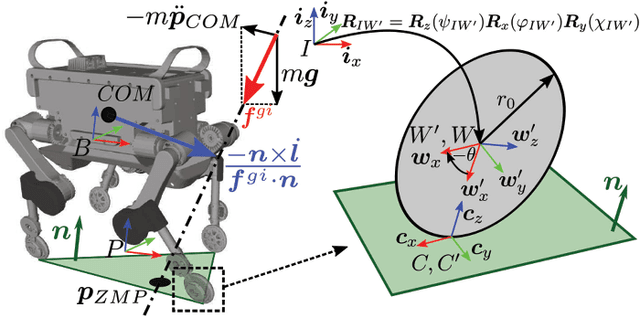
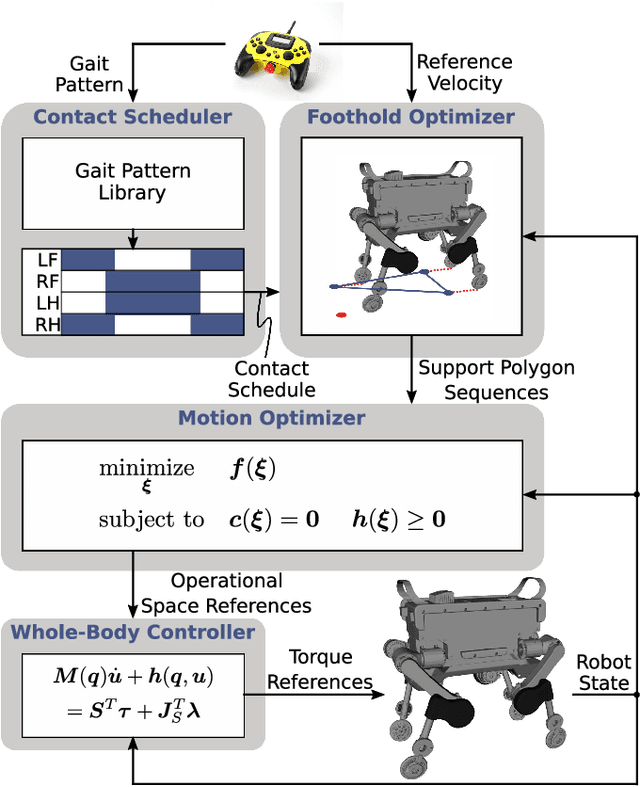
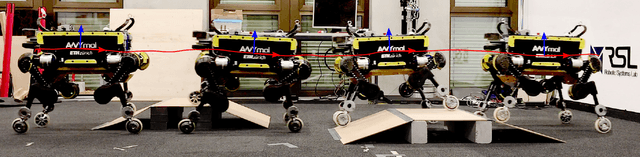
We show dynamic locomotion strategies for wheeled quadrupedal robots, which combine the advantages of both walking and driving. The developed optimization framework tightly integrates the additional degrees of freedom introduced by the wheels. Our approach relies on a zero-moment point based motion optimization which continuously updates reference trajectories. The reference motions are tracked by a hierarchical whole-body controller which computes optimal generalized accelerations and contact forces by solving a sequence of prioritized tasks including the nonholonomic rolling constraints. Our approach has been tested on ANYmal, a quadrupedal robot that is fully torque-controlled including the non-steerable wheels attached to its legs. We conducted experiments on flat and inclined terrains as well as over steps, whereby we show that integrating the wheels into the motion control and planning framework results in intuitive motion trajectories, which enable more robust and dynamic locomotion compared to other wheeled-legged robots. Moreover, with a speed of 4 m/s and a reduction of the cost of transport by 83 % we prove the superiority of wheeled-legged robots compared to their legged counterparts.
* IEEE Robotics and Automation Letters
Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces
Jan 31, 2019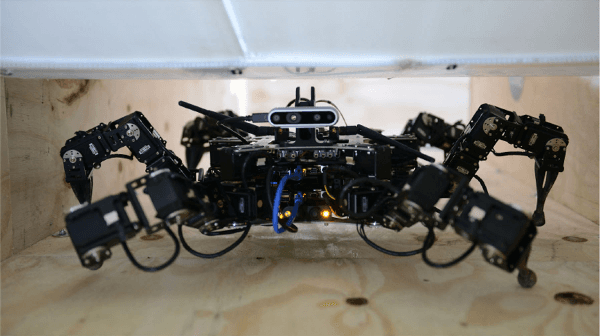
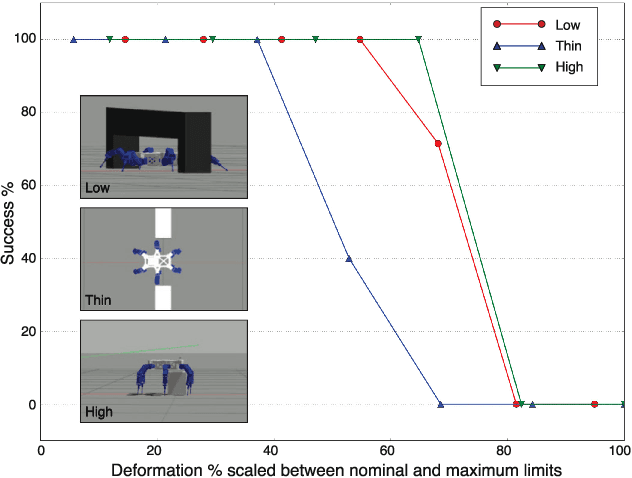
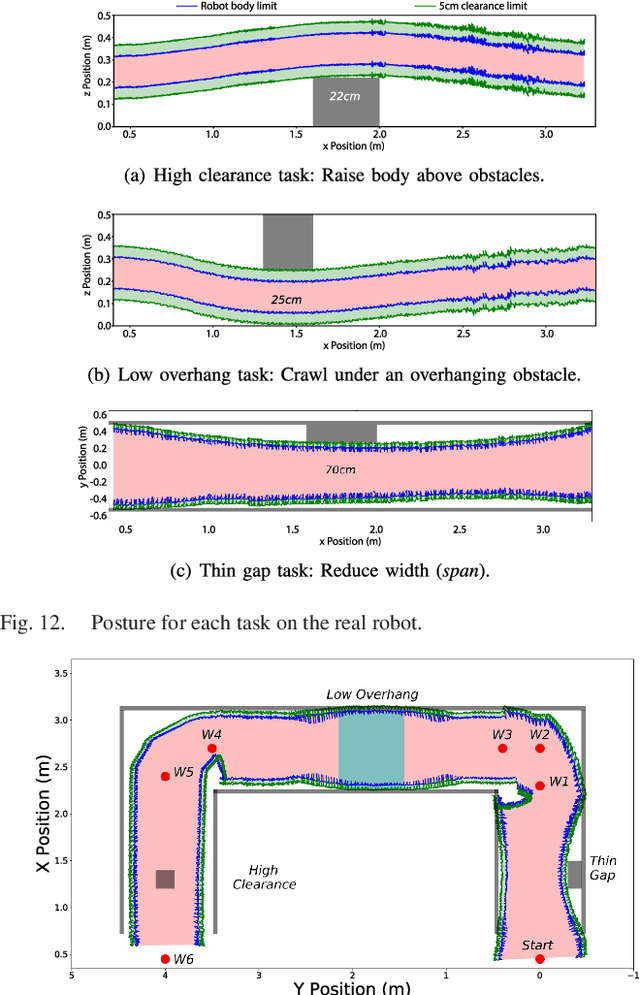
Legged robots have the ability to adapt their walking posture to navigate confined spaces due to their high degrees of freedom. However, this has not been exploited in most common multilegged platforms. This paper presents a deformable bounding box abstraction of the robot model, with accompanying mapping and planning strategies, that enable a legged robot to autonomously change its body shape to navigate confined spaces. The mapping is achieved using robot-centric multi-elevation maps generated with distance sensors carried by the robot. The path planning is based on the trajectory optimisation algorithm CHOMP which creates smooth trajectories while avoiding obstacles. The proposed method has been tested in simulation and implemented on the hexapod robot Weaver, which is 33cm tall and 82cm wide when walking normally. We demonstrate navigating under 25cm overhanging obstacles, through 70cm wide gaps and over 22cm high obstacles in both artificial testing spaces and realistic environments, including a subterranean mining tunnel.