 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeries-Parallel Integrated Nonlinear Elastic Actuator applied to the lean motion of a bicycle simulator
May 29, 2026Designing robots for high-torque, high-fidelity haptic interaction is challenging. Parallel Elastic Actuators (PEAs) use elastic elements in parallel to smaller motors to complement torques, and Series Elastic Actuators (SEAs) use elastic elements in series to decouple motor impedance and improve force control. Recent work combines SEAs and PEAs to obtain both benefits but requires separate elastic elements or clutching. This paper presents the Series Parallel Integrated Nonlinear Elastic Actuator (SPINEA), which merges SEA and PEA such that a single elastic element takes on dual roles simultaneously, parallel and series. This is achieved by a nonlinear transmission in which the motor and load have misaligned rotation axes and are elastically connected. This geometry enables both high peak torque and precise torque tracking. We apply SPINEA to actuate lean of a haptic bicycle simulator, which requires high moments and precise rendering for safe and realistic rider interactions. We realized a prototype and performed experiments, both with an external excitation setup and with riders cycling. Our results confirm SPINEA's low impedance and precise torque tracking, up to 4.25 Hz with the bicycle frame fixed and up to 4 Hz with riders. The benefits may transfer to other applications requiring compact, high-performance actuation.
Loosely Coupled Factor Graph Optimization for Pseudolite-Augmented Navigation
May 24, 2026In Global Navigation Satellite System (GNSS)-degraded environments, pseudolites (PLs) provide additional signal sources to enhance positioning performance, but their integration in optimization-based frameworks remains limited. This paper presents a loosely coupled factor graph optimization (FGO) framework that fuses the GNSS/PL least-squares (LS) solutions with inertial measurement unit (IMU) data. The evaluation considers low GNSS visibility scenarios with four high-elevation GNSS satellites and up to two PL transmitters over an 80~s window. FGO achieves a 22.8\% to 41.3\% reduction in mean 3D error compared to standard LS methods. Compared to a GNSS-IMU baseline, incorporating PL transmitters further improves positioning accuracy, with performance depending on geometry.
Personalized Gait Patterns During Exoskeleton-Aided Training May Have Minimal Effect on User Experience. Insights from a Pilot Study
Dec 19, 2025



Robot-aided gait rehabilitation facilitates high-intensity and repeatable therapy. However, most exoskeletons rely on pre-recorded, non-personalized gait trajectories constrained to the sagittal plane, potentially limiting movement naturalness and user comfort. We present a data-driven gait personalization framework for an exoskeleton that supports multi-planar motion, including hip abduction/adduction and pelvic translation and rotation. Personalized trajectories to individual participants were generated using regression models trained on anthropometric, demographic, and walking speed data from a normative database. In a within-subject experiment involving ten unimpaired participants, these personalized trajectories were evaluated in regard to comfort, naturalness, and overall experience and compared against two standard patterns from the same database: one averaging all the trajectories, and one randomly selected. We did not find relevant differences across pattern conditions, despite all trajectories being executed with high accuracy thanks to a stiff position-derivative controller. We found, however, that pattern conditions in later trials were rated as more comfortable and natural than those in the first trial, suggesting that participants might have adapted to walking within the exoskeleton, regardless of the enforced gait pattern. Our findings highlight the importance of integrating subjective feedback when designing personalized gait controllers and accounting for user adaptation during experimentation.
A Passive Mechanical Add-on for Treadmill Exercise (P-MATE) in Stroke Rehabilitation
Jan 06, 2025



Robotic rehabilitation can deliver high-dose gait therapy and improve motor function after a stroke. However, for many devices, high costs and lengthy setup times limit clinical adoption. Thus, we designed, built, and evaluated the Passive Mechanical Add-on for Treadmill Exercise (P-MATE), a low-cost passive end-effector add-on for treadmills that couples the movement of the paretic and non-paretic legs via a reciprocating system of elastic cables and pulleys. Two human-device mechanical interfaces were designed to attach the elastic cables to the user. The P-MATE and two interface prototypes were tested with a physical therapist and eight unimpaired participants. Biomechanical data, including kinematics and interaction forces, were collected alongside standardized questionnaires to assess usability and user experience. Both interfaces were quick and easy to attach, though user experience differed, highlighting the need for personalization. We also identified areas for future improvement, including pretension adjustments, tendon derailing prevention, and understanding long-term impacts on user gait. Our preliminary findings underline the potential of the P-MATE to provide effective, accessible, and sustainable stroke gait rehabilitation.
GNSS/Multi-Sensor Fusion Using Continuous-Time Factor Graph Optimization for Robust Localization
Sep 20, 2023



Accurate and robust vehicle localization in highly urbanized areas is challenging. Sensors are often corrupted in those complicated and large-scale environments. This paper introduces GNSS-FGO, an online and global trajectory estimator that fuses GNSS observations alongside multiple sensor measurements for robust vehicle localization. In GNSS-FGO, we fuse asynchronous sensor measurements into the graph with a continuous-time trajectory representation using Gaussian process regression. This enables querying states at arbitrary timestamps so that sensor observations are fused without requiring strict state and measurement synchronization. Thus, the proposed method presents a generalized factor graph for multi-sensor fusion. To evaluate and study different GNSS fusion strategies, we fuse GNSS measurements in loose and tight coupling with a speed sensor, IMU, and lidar-odometry. We employed datasets from measurement campaigns in Aachen, Duesseldorf, and Cologne in experimental studies and presented comprehensive discussions on sensor observations, smoother types, and hyperparameter tuning. Our results show that the proposed approach enables robust trajectory estimation in dense urban areas, where the classic multi-sensor fusion method fails due to sensor degradation. In a test sequence containing a 17km route through Aachen, the proposed method results in a mean 2D positioning error of 0.19m for loosely coupled GNSS fusion and 0.48m while fusing raw GNSS observations with lidar odometry in tight coupling.
Learning-based NLOS Detection and Uncertainty Prediction of GNSS Observations with Transformer-Enhanced LSTM Network
Sep 01, 2023The global navigation satellite systems (GNSS) play a vital role in transport systems for accurate and consistent vehicle localization. However, GNSS observations can be distorted due to multipath effects and non-line-of-sight (NLOS) receptions in challenging environments such as urban canyons. In such cases, traditional methods to classify and exclude faulty GNSS observations may fail, leading to unreliable state estimation and unsafe system operations. This work proposes a Deep-Learning-based method to detect NLOS receptions and predict GNSS pseudorange errors by analyzing GNSS observations as a spatio-temporal modeling problem. Compared to previous works, we construct a transformer-like attention mechanism to enhance the long short-term memory (LSTM) networks, improving model performance and generalization. For the training and evaluation of the proposed network, we used labeled datasets from the cities of Hong Kong and Aachen. We also introduce a dataset generation process to label the GNSS observations using lidar maps. In experimental studies, we compare the proposed network with a deep-learning-based model and classical machine-learning models. Furthermore, we conduct ablation studies of our network components and integrate the NLOS detection with data out-of-distribution in a state estimator. As a result, our network presents improved precision and recall ratios compared to other models. Additionally, we show that the proposed method avoids trajectory divergence in real-world vehicle localization by classifying and excluding NLOS observations.
Rolling in the Deep -- Hybrid Locomotion for Wheeled-Legged Robots using Online Trajectory Optimization
Sep 16, 2019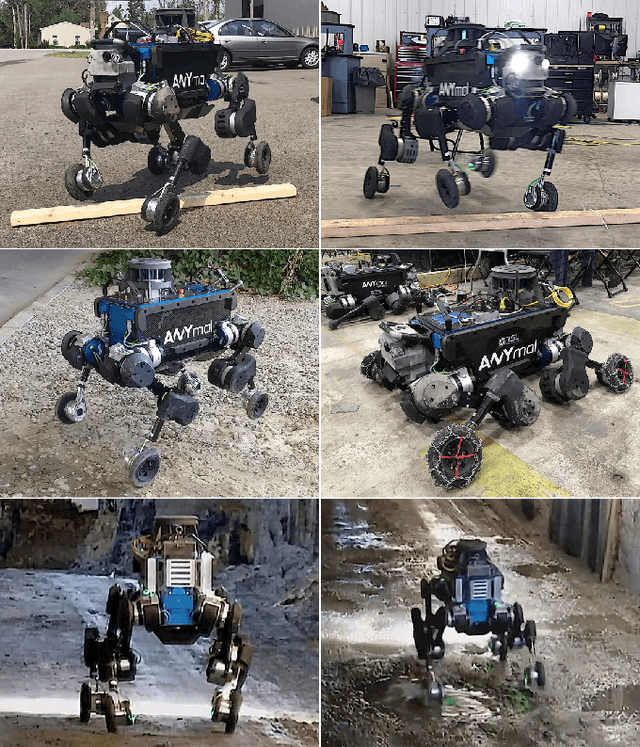
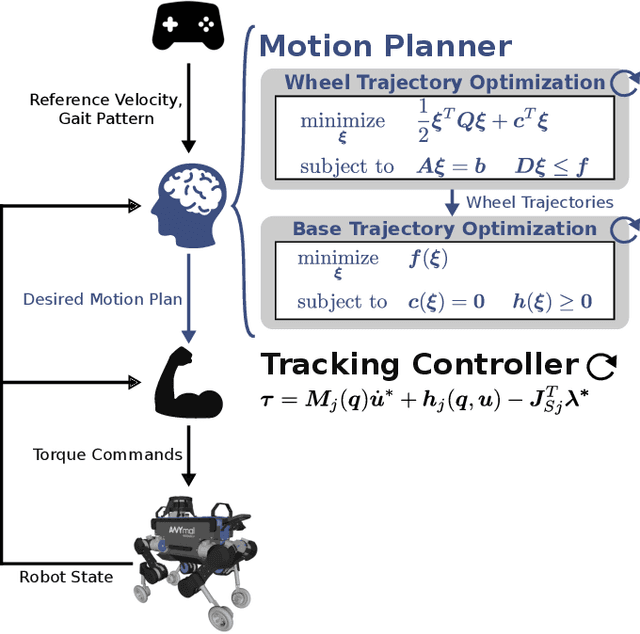
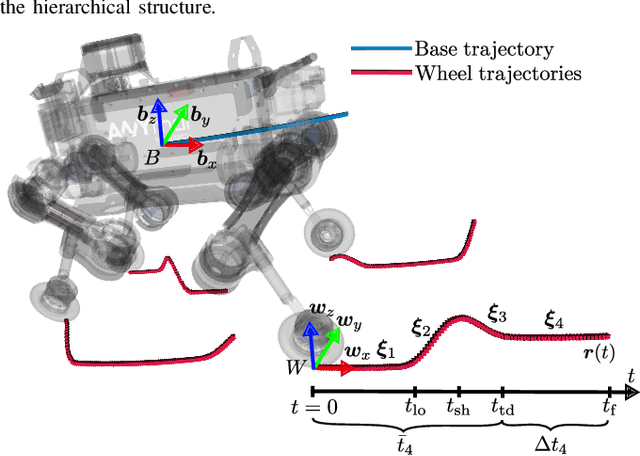
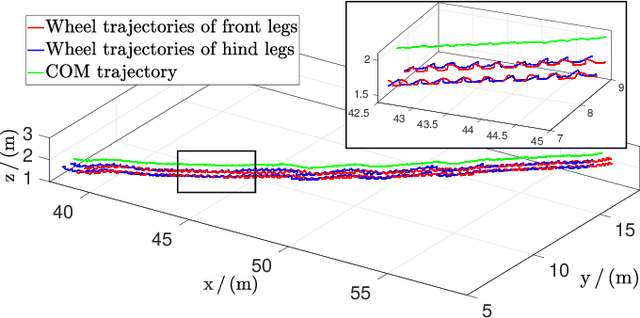
Wheeled-legged robots have the potential for highly agile and versatile locomotion. The combination of legs and wheels might be a solution for any real-world application requiring rapid, and long-distance mobility skills on challenging terrain. In this paper, we present an online trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking-driving locomotion strategies. By breaking down the optimization problem into a wheel and base trajectory planning, locomotion planning for high dimensional wheeled-legged robots becomes more tractable, can be solved in real-time on-board in a model predictive control fashion, and becomes robust against unpredicted disturbances. The reference motions are tracked by a hierarchical whole-body controller that sends torque commands to the robot. Our approach is verified on a quadrupedal robot that is fully torque-controlled, including the non-steerable wheels attached to its legs. The robot performs hybrid locomotion with different gait sequences on flat and rough terrain. In addition, we validated the robotic platform at the Defense Advanced Research Projects Agency (DARPA) Subterranean Challenge, where the robot rapidly maps, navigates, and explores dynamic underground environments.