 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopomap: Topological Mapping and Navigation Based on Visual SLAM Maps
Mar 09, 2018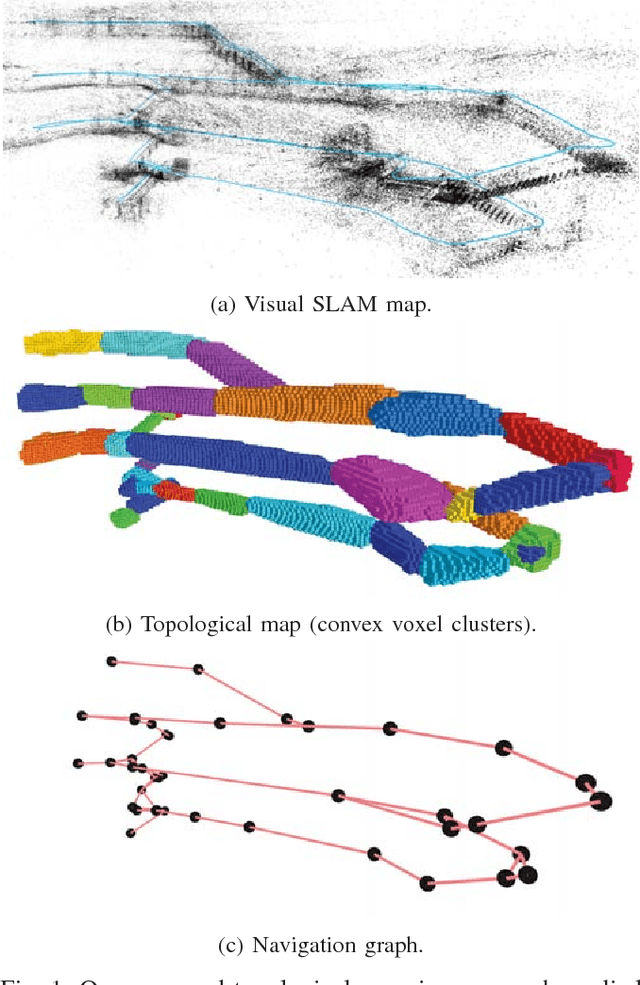
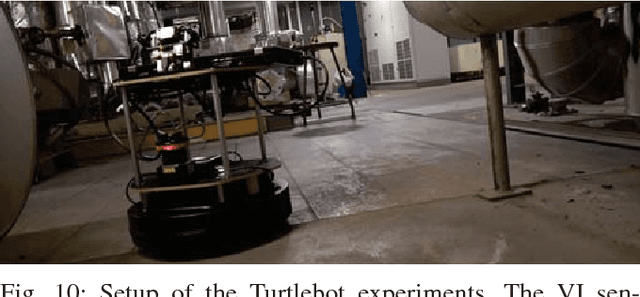
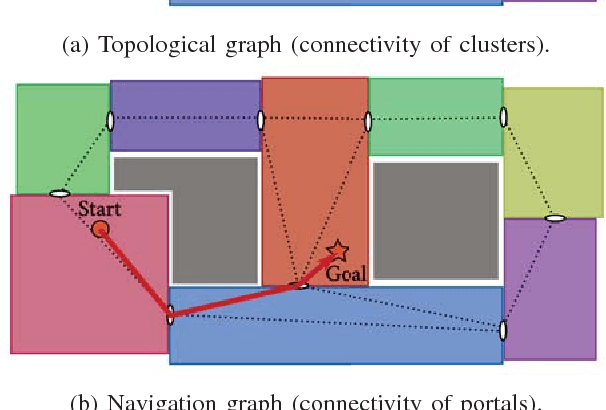
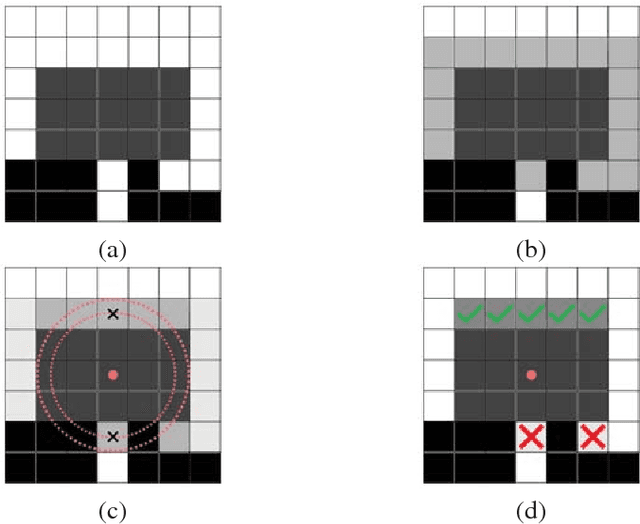
Visual robot navigation within large-scale, semi-structured environments deals with various challenges such as computation intensive path planning algorithms or insufficient knowledge about traversable spaces. Moreover, many state-of-the-art navigation approaches only operate locally instead of gaining a more conceptual understanding of the planning objective. This limits the complexity of tasks a robot can accomplish and makes it harder to deal with uncertainties that are present in the context of real-time robotics applications. In this work, we present Topomap, a framework which simplifies the navigation task by providing a map to the robot which is tailored for path planning use. This novel approach transforms a sparse feature-based map from a visual Simultaneous Localization And Mapping (SLAM) system into a three-dimensional topological map. This is done in two steps. First, we extract occupancy information directly from the noisy sparse point cloud. Then, we create a set of convex free-space clusters, which are the vertices of the topological map. We show that this representation improves the efficiency of global planning, and we provide a complete derivation of our algorithm. Planning experiments on real world datasets demonstrate that we achieve similar performance as RRT* with significantly lower computation times and storage requirements. Finally, we test our algorithm on a mobile robotic platform to prove its advantages.
maplab: An Open Framework for Research in Visual-inertial Mapping and Localization
Nov 28, 2017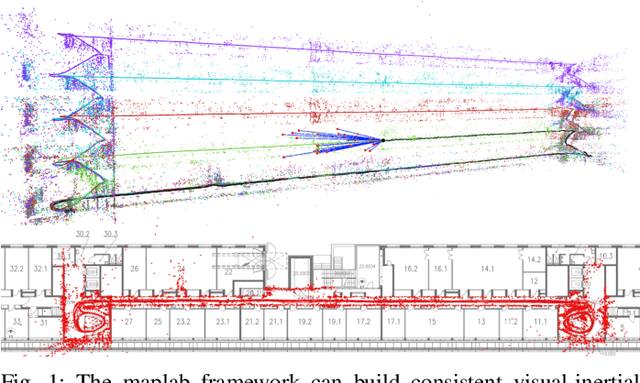
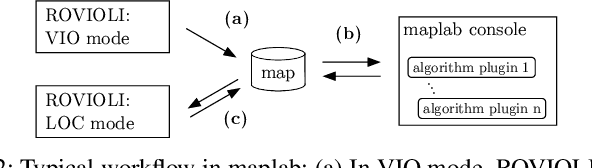
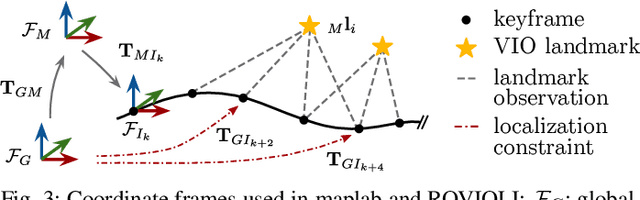
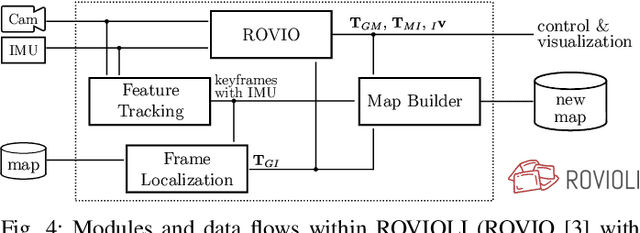
Robust and accurate visual-inertial estimation is crucial to many of today's challenges in robotics. Being able to localize against a prior map and obtain accurate and driftfree pose estimates can push the applicability of such systems even further. Most of the currently available solutions, however, either focus on a single session use-case, lack localization capabilities or an end-to-end pipeline. We believe that only a complete system, combining state-of-the-art algorithms, scalable multi-session mapping tools, and a flexible user interface, can become an efficient research platform. We therefore present maplab, an open, research-oriented visual-inertial mapping framework for processing and manipulating multi-session maps, written in C++. On the one hand, maplab can be seen as a ready-to-use visual-inertial mapping and localization system. On the other hand, maplab provides the research community with a collection of multisession mapping tools that include map merging, visual-inertial batch optimization, and loop closure. Furthermore, it includes an online frontend that can create visual-inertial maps and also track a global drift-free pose within a localization map. In this paper, we present the system architecture, five use-cases, and evaluations of the system on public datasets. The source code of maplab is freely available for the benefit of the robotics research community.
Voxblox: Incremental 3D Euclidean Signed Distance Fields for On-Board MAV Planning
Apr 21, 2017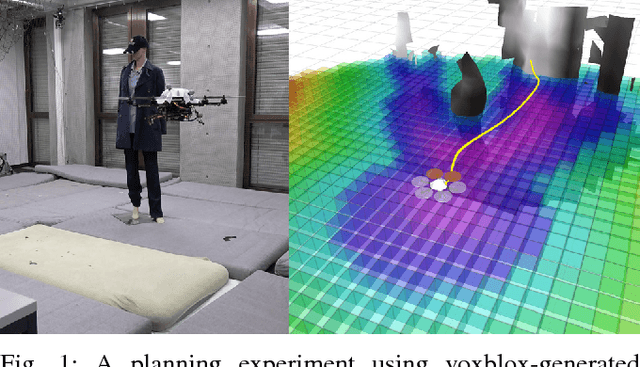
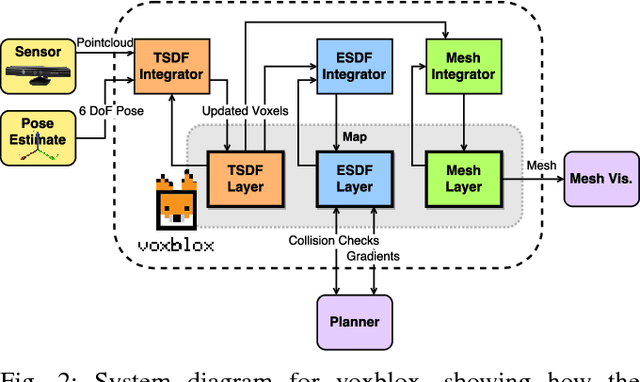
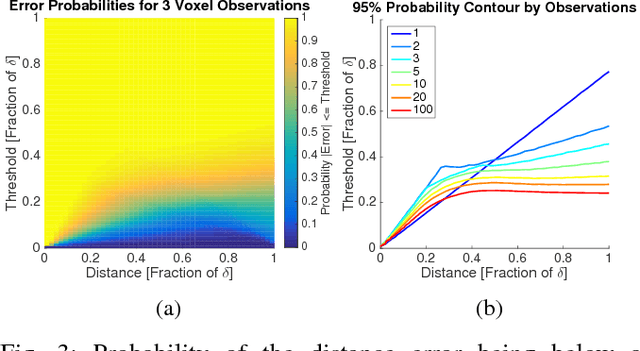
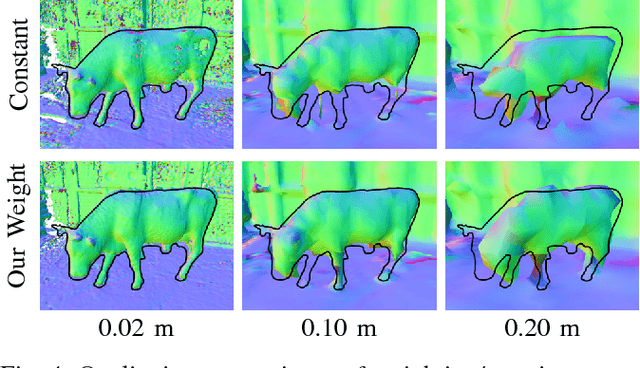
Micro Aerial Vehicles (MAVs) that operate in unstructured, unexplored environments require fast and flexible local planning, which can replan when new parts of the map are explored. Trajectory optimization methods fulfill these needs, but require obstacle distance information, which can be given by Euclidean Signed Distance Fields (ESDFs). We propose a method to incrementally build ESDFs from Truncated Signed Distance Fields (TSDFs), a common implicit surface representation used in computer graphics and vision. TSDFs are fast to build and smooth out sensor noise over many observations, and are designed to produce surface meshes. Meshes allow human operators to get a better assessment of the robot's environment, and set high-level mission goals. We show that we can build TSDFs faster than Octomaps, and that it is more accurate to build ESDFs out of TSDFs than occupancy maps. Our complete system, called voxblox, will be available as open source and runs in real-time on a single CPU core. We validate our approach on-board an MAV, by using our system with a trajectory optimization local planner, entirely on-board and in real-time.