 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized-CVO: Fast and Correspondence-Free Local Point Cloud Registration with Second Order Riemannian Optimization
Jun 08, 2026We propose a fast and correspondence-free local point cloud registration method that leverages geometric surface structure and reproducing kernel Hilbert space (RKHS) embeddings. The method represents point clouds as continuous functions with point-wise anisotropic kernels that encode local geometry. This formulation improves alignment along surface normals while relaxing alignment along tangential directions. To solve the resulting registration problem, we propose a second-order on-manifold optimization scheme with approximate Riemannian Hessians, achieving a speedup of up to 10x over the first-order solvers used in prior correspondence-free RKHS-based methods. We demonstrate improved frame-to-frame LiDAR and RGB-D tracking accuracy across diverse indoor and outdoor datasets. On a LiDAR tracking registration task in the driving domain, we achieve a reduction of $>55\%$ in both translational and rotational drift in challenging feature-sparse environments. On object registration benchmarks, we show improved robustness over ICP-based methods and further gains when refining global initialization, particularly under moderate misalignment.
Vision-Conditioned Variational Bayesian Last Layer Dynamics Models
Jan 16, 2026Agile control of robotic systems often requires anticipating how the environment affects system behavior. For example, a driver must perceive the road ahead to anticipate available friction and plan actions accordingly. Achieving such proactive adaptation within autonomous frameworks remains a challenge, particularly under rapidly changing conditions. Traditional modeling approaches often struggle to capture abrupt variations in system behavior, while adaptive methods are inherently reactive and may adapt too late to ensure safety. We propose a vision-conditioned variational Bayesian last-layer dynamics model that leverages visual context to anticipate changes in the environment. The model first learns nominal vehicle dynamics and is then fine-tuned with feature-wise affine transformations of latent features, enabling context-aware dynamics prediction. The resulting model is integrated into an optimal controller for vehicle racing. We validate our method on a Lexus LC500 racing through water puddles. With vision-conditioning, the system completed all 12 attempted laps under varying conditions. In contrast, all baselines without visual context consistently lost control, demonstrating the importance of proactive dynamics adaptation in high-performance applications.
Semantic Property Maps for Driving Applications
Nov 13, 2025


We consider the problem of estimating the parameters of a vehicle dynamics model for predictive control in driving applications. Instead of solely using the instantaneous parameters estimated from the vehicle signals, we combine this with cameras and update a probabilistic map with parameter estimates and semantic information using Bayesian moment matching. Key to this approach is the map representation, which is constructed with conjugate priors to the measurement likelihoods and defined in the same path coordinates as the vehicle controller, such that the map can be externalized to provide a local representation of the parameter likelihoods that vary in space. The result is a spatial map of vehicle parameters adapted online to enhance the driving control system. We provide theoretical guarantees on the smoothness of relevant parameter likelihood statistics as a function of space, which is critical for their use in predictive control.
A Probability-guided Sampler for Neural Implicit Surface Rendering
Jun 10, 2025Several variants of Neural Radiance Fields (NeRFs) have significantly improved the accuracy of synthesized images and surface reconstruction of 3D scenes/objects. In all of these methods, a key characteristic is that none can train the neural network with every possible input data, specifically, every pixel and potential 3D point along the projection rays due to scalability issues. While vanilla NeRFs uniformly sample both the image pixels and 3D points along the projection rays, some variants focus only on guiding the sampling of the 3D points along the projection rays. In this paper, we leverage the implicit surface representation of the foreground scene and model a probability density function in a 3D image projection space to achieve a more targeted sampling of the rays toward regions of interest, resulting in improved rendering. Additionally, a new surface reconstruction loss is proposed for improved performance. This new loss fully explores the proposed 3D image projection space model and incorporates near-to-surface and empty space components. By integrating our novel sampling strategy and novel loss into current state-of-the-art neural implicit surface renderers, we achieve more accurate and detailed 3D reconstructions and improved image rendering, especially for the regions of interest in any given scene.
* Accepted in ECCV 2024
First, Learn What You Don't Know: Active Information Gathering for Driving at the Limits of Handling
Oct 31, 2024Combining data-driven models that adapt online and model predictive control (MPC) has enabled effective control of nonlinear systems. However, when deployed on unstable systems, online adaptation may not be fast enough to ensure reliable simultaneous learning and control. For example, controllers on a vehicle executing highly dynamic maneuvers may push the tires to their friction limits, destabilizing the vehicle and allowing modeling errors to quickly compound and cause a loss of control. In this work, we present a Bayesian meta-learning MPC framework. We propose an expressive vehicle dynamics model that leverages Bayesian last-layer meta-learning to enable rapid online adaptation. The model's uncertainty estimates are used to guide informative data collection and quickly improve the model prior to deployment. Experiments on a Toyota Supra show that (i) the framework enables reliable control in dynamic drifting maneuvers, (ii) online adaptation alone may not suffice for zero-shot control of a vehicle at the edge of stability, and (iii) active data collection helps achieve reliable performance.
Risk-Averse Model Predictive Control for Racing in Adverse Conditions
Oct 22, 2024



Model predictive control (MPC) algorithms can be sensitive to model mismatch when used in challenging nonlinear control tasks. In particular, the performance of MPC for vehicle control at the limits of handling suffers when the underlying model overestimates the vehicle's capabilities. In this work, we propose a risk-averse MPC framework that explicitly accounts for uncertainty over friction limits and tire parameters. Our approach leverages a sample-based approximation of an optimal control problem with a conditional value at risk (CVaR) constraint. This sample-based formulation enables planning with a set of expressive vehicle dynamics models using different tire parameters. Moreover, this formulation enables efficient numerical resolution via sequential quadratic programming and GPU parallelization. Experiments on a Lexus LC 500 show that risk-averse MPC unlocks reliable performance, while a deterministic baseline that plans using a single dynamics model may lose control of the vehicle in adverse road conditions.
Cooperative constrained motion coordination of networked heterogeneous vehicles
Jan 17, 2022



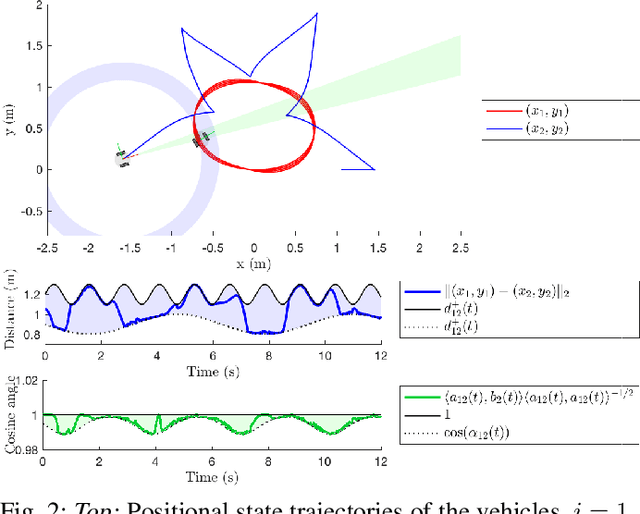
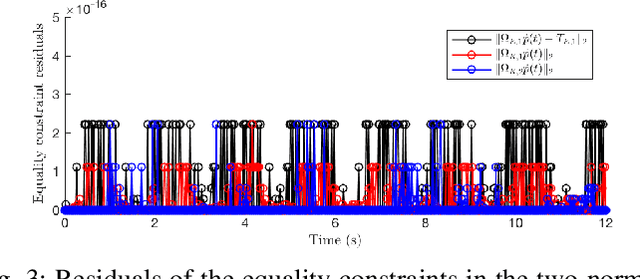
We consider the problem of cooperative motion coordination for multiple heterogeneous mobile vehicles subject to various constraints. These include nonholonomic motion constraints, constant speed constraints, holonomic coordination constraints, and equality/inequality geometric constraints. We develop a general framework involving differential-algebraic equations and viability theory to determine coordination feasibility for a coordinated motion control under heterogeneous vehicle dynamics and different types of coordination task constraints. If a coordinated motion solution exists for the derived differential-algebraic equations and/or inequalities, a constructive algorithm is proposed to derive an equivalent dynamical system that generates a set of feasible coordinated motions for each individual vehicle. In case studies on coordinating two vehicles, we derive analytical solutions to motion generation for two-vehicle groups consisting of car-like vehicles, unicycle vehicles, or vehicles with constant speeds, which serve as benchmark coordination tasks for more complex vehicle groups. The motion generation algorithm is well-backed by simulation data for a wide variety of coordination situations involving heterogeneous vehicles. We then extend the vehicle control framework to deal with the cooperative coordination problem with time-varying coordination tasks and leader-follower structure. We show several simulation experiments on multi-vehicle coordination under various constraints to validate the theory and the effectiveness of the proposed schemes.
Temporal viability regulation for control affine systems with applications to mobile vehicle coordination under time-varying motion constraints
Nov 15, 2018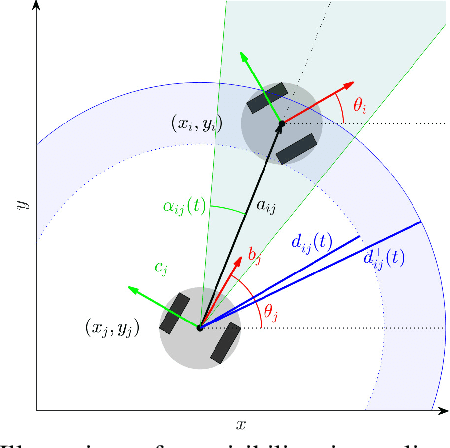
Controlled invariant set and viability regulation of dynamical control systems have played important roles in many control and coordination applications. In this paper we develop a temporal viability regulation theory for general dynamical control systems, and in particular for control affine systems. The time-varying viable set is parameterized by time-varying constraint functions, with the aim to regulate a dynamical control system to be invariant in the time-varying viable set so that temporal state-dependent constraints are enforced. We consider both time-varying equality and inequality constraints in defining a temporal viable set. We also present sufficient conditions for the existence of feasible control input for the control affine systems. The developed temporal viability regulation theory is applied to mobile vehicle coordination.