 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetaSort: An Accelerated Approach for Non-uniform Compression and Few-shot Classification of Neural Spike Waveforms
Mar 08, 2026Many previous works in spike sorting study spike classification and compression independently. In this paper, a novel algorithm is proposed called MetaSort to address these two problems. To deal with compression, a novel adaptive level crossing algorithm is proposed to approximate spike shapes with high fidelity. Meanwhile, the latent feature representation is used to handle the classification problem. Besides, to guarantee MetaSort is robust and discriminative, the geometric information of data is exploited simultaneously in the proposed framework by meta-transfer learning. Empirical experiments with in-vivo spike data demonstrate that MetaSort delivers promising performance, highlighting its potential and motivating continued development toward an ultra-low-power, on-chip implementation.
Robustness Certificates for Neural Networks against Adversarial Attacks
Dec 24, 2025



The increasing use of machine learning in safety-critical domains amplifies the risk of adversarial threats, especially data poisoning attacks that corrupt training data to degrade performance or induce unsafe behavior. Most existing defenses lack formal guarantees or rely on restrictive assumptions about the model class, attack type, extent of poisoning, or point-wise certification, limiting their practical reliability. This paper introduces a principled formal robustness certification framework that models gradient-based training as a discrete-time dynamical system (dt-DS) and formulates poisoning robustness as a formal safety verification problem. By adapting the concept of barrier certificates (BCs) from control theory, we introduce sufficient conditions to certify a robust radius ensuring that the terminal model remains safe under worst-case ${\ell}_p$-norm based poisoning. To make this practical, we parameterize BCs as neural networks trained on finite sets of poisoned trajectories. We further derive probably approximately correct (PAC) bounds by solving a scenario convex program (SCP), which yields a confidence lower bound on the certified robustness radius generalizing beyond the training set. Importantly, our framework also extends to certification against test-time attacks, making it the first unified framework to provide formal guarantees in both training and test-time attack settings. Experiments on MNIST, SVHN, and CIFAR-10 show that our approach certifies non-trivial perturbation budgets while being model-agnostic and requiring no prior knowledge of the attack or contamination level.
A Real-time and Hardware Efficient Artfecat-free Spike Sorting Using Deep Spike Detection
Apr 19, 2025



Spike sorting is a valuable tool in understanding brain regions. It assigns detected spike waveforms to their origins, helping to research the mechanism of the human brain and the development of implantable brain-machine interfaces (iBMIs). The presence of noise and artefacts will adversely affect the efficacy of spike sorting. This paper proposes a framework for low-cost and real-time implementation of deep spike detection, which consists of two one-dimensional (1-D) convolutional neural network (CNN) model for channel selection and artefact removal. The framework utilizes simulation and hardware layers, and it applies several low-power techniques to optimise the implementation cost of a 1-D CNN model. A compact CNN model with 210 bytes memory size is achieved using structured pruning, network projection and quantization in the simulation layer. The hardware layer also accommodates various techniques including a customized multiply-accumulate (MAC) engine, novel fused layers in the convolution pipeline and proposing flexible resource allocation for a power-efficient and low-delay design. The optimized 1-D CNN significantly decreases both computational complexity and model size, with only a minimal reduction in accuracy. Classification of 1-D CNN on the Cyclone V 5CSEMA5F31C6 FPGA evaluation platform is accomplished in just 16.8 microseconds at a frequency of 2.5 MHz. The FPGA prototype achieves an accuracy rate of 97.14% on a standard dataset and operates with a power consumption of 2.67mW from a supply voltage of 1.1 volts. An accuracy of 95.05% is achieved with a power of 5.6mW when deep spike detection is implemented using two optimized 1-D CNNs on an FPGA board.
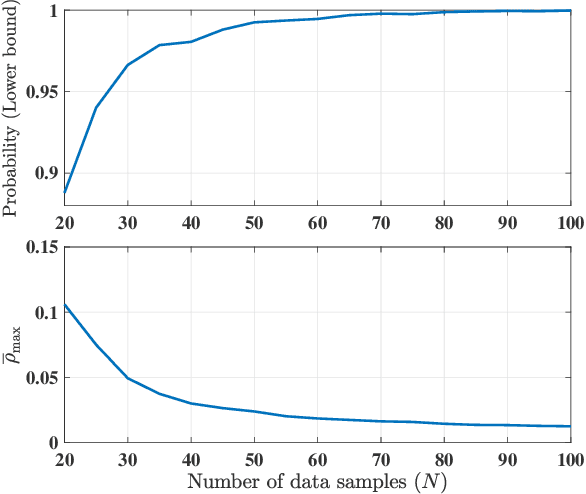
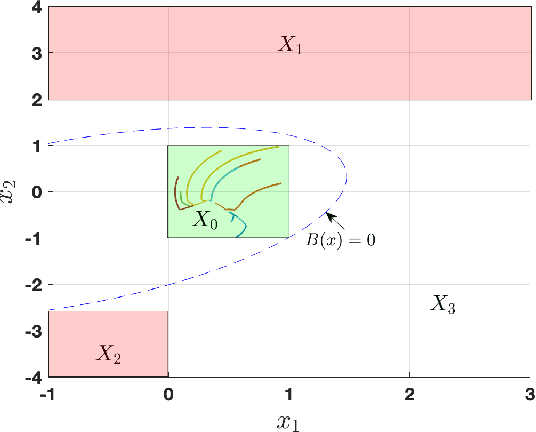
Data-Driven Safety Verification using Barrier Certificates and Matrix Zonotopes
Apr 01, 2025Ensuring safety in cyber-physical systems (CPSs) is a critical challenge, especially when system models are difficult to obtain or cannot be fully trusted due to uncertainty, modeling errors, or environmental disturbances. Traditional model-based approaches rely on precise system dynamics, which may not be available in real-world scenarios. To address this, we propose a data-driven safety verification framework that leverages matrix zonotopes and barrier certificates to verify system safety directly from noisy data. Instead of trusting a single unreliable model, we construct a set of models that capture all possible system dynamics that align with the observed data, ensuring that the true system model is always contained within this set. This model set is compactly represented using matrix zonotopes, enabling efficient computation and propagation of uncertainty. By integrating this representation into a barrier certificate framework, we establish rigorous safety guarantees without requiring an explicit system model. Numerical experiments demonstrate the effectiveness of our approach in verifying safety for dynamical systems with unknown models, showcasing its potential for real-world CPS applications.
Transfer Learning for Control Systems via Neural Simulation Relations
Dec 02, 2024



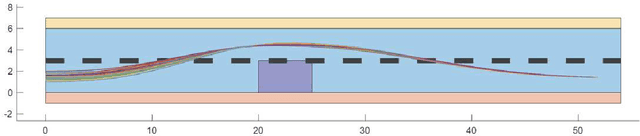
Transfer learning is an umbrella term for machine learning approaches that leverage knowledge gained from solving one problem (the source domain) to improve speed, efficiency, and data requirements in solving a different but related problem (the target domain). The performance of the transferred model in the target domain is typically measured via some notion of loss function in the target domain. This paper focuses on effectively transferring control logic from a source control system to a target control system while providing approximately similar behavioral guarantees in both domains. However, in the absence of a complete characterization of behavioral specifications, this problem cannot be captured in terms of loss functions. To overcome this challenge, we use (approximate) simulation relations to characterize observational equivalence between the behaviors of two systems. Simulation relations ensure that the outputs of both systems, equipped with their corresponding controllers, remain close to each other over time, and their closeness can be quantified {\it a priori}. By parameterizing simulation relations with neural networks, we introduce the notion of \emph{neural simulation relations}, which provides a data-driven approach to transfer any synthesized controller, regardless of the specification of interest, along with its proof of correctness. Compared with prior approaches, our method eliminates the need for a closed-loop mathematical model and specific requirements for both the source and target systems. We also introduce validity conditions that, when satisfied, guarantee the closeness of the outputs of two systems equipped with their corresponding controllers, thus eliminating the need for post-facto verification. We demonstrate the effectiveness of our approach through case studies involving a vehicle and a double inverted pendulum.
Transfer of Safety Controllers Through Learning Deep Inverse Dynamics Model
May 22, 2024



Control barrier certificates have proven effective in formally guaranteeing the safety of the control systems. However, designing a control barrier certificate is a time-consuming and computationally expensive endeavor that requires expert input in the form of domain knowledge and mathematical maturity. Additionally, when a system undergoes slight changes, the new controller and its correctness certificate need to be recomputed, incurring similar computational challenges as those faced during the design of the original controller. Prior approaches have utilized transfer learning to transfer safety guarantees in the form of a barrier certificate while maintaining the control invariant. Unfortunately, in practical settings, the source and the target environments often deviate substantially in their control inputs, rendering the aforementioned approach impractical. To address this challenge, we propose integrating \emph{inverse dynamics} -- a neural network that suggests required action given a desired successor state -- of the target system with the barrier certificate of the source system to provide formal proof of safety. In addition, we propose a validity condition that, when met, guarantees correctness of the controller. We demonstrate the effectiveness of our approach through three case studies.
Efficient Approximation of Action Potentials with High-Order Shape Preservation in Unsupervised Spike Sorting
Apr 28, 2022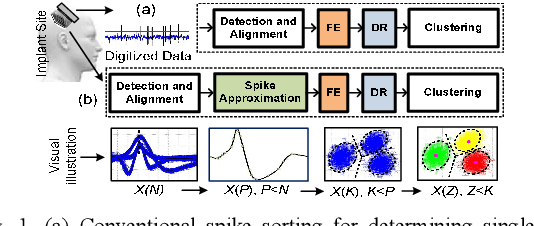
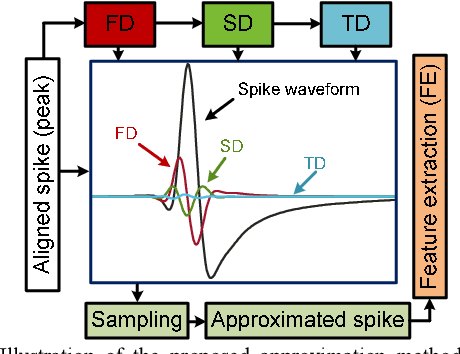
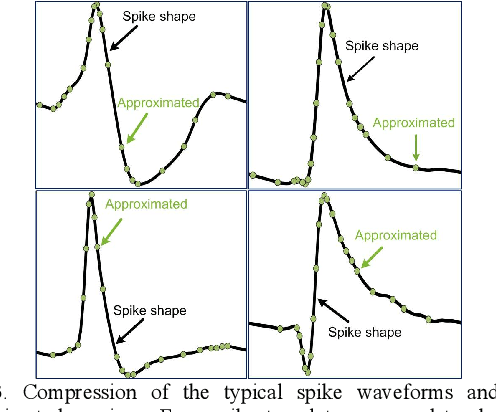
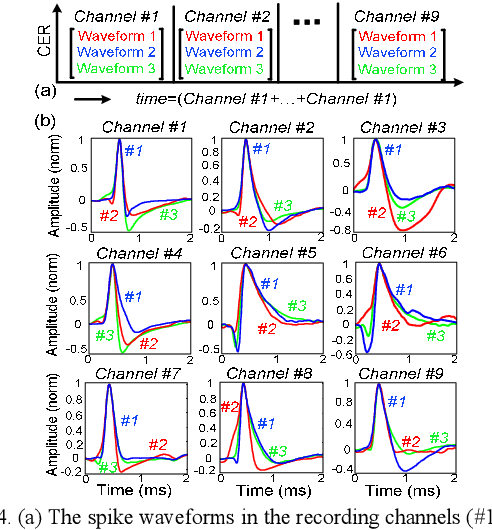
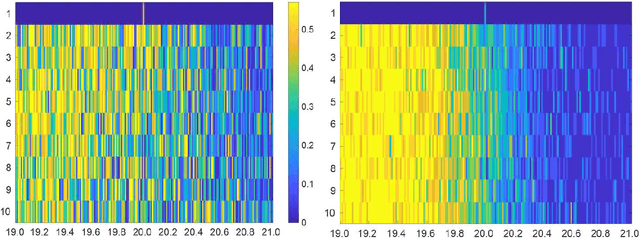
This paper presents a novel approximation unit added to the conventional spike processing chain which provides an appreciable reduction of complexity of the high-hardware cost feature extractors. The use of the Taylor polynomial is proposed and modelled employing its cascaded derivatives to non-uniformly capture the essential samples in each spike for reliable feature extraction and sorting. Inclusion of the approximation unit can provide 3X compression (i.e. from 66 to 22 samples) to the spike waveforms while preserving their shapes. Detailed spike waveform sequences based on in-vivo measurements have been generated using a customized neural simulator for performance assessment of the approximation unit tested on six published feature extractors. For noise levels {\sigma}_N between 0.05 and 0.3 and groups of 3 spikes in each channel, all the feature extractors provide almost same sorting performance before and after approximation. The overall implementation cost when including the approximation unit and feature extraction shows a large reduction (i.e. up to 8.7X) in the hardware costly and more accurate feature extractors, offering a substantial improvement in feature extraction design.
Control Barrier Functions for Unknown Nonlinear Systems using Gaussian Processes
Oct 12, 2020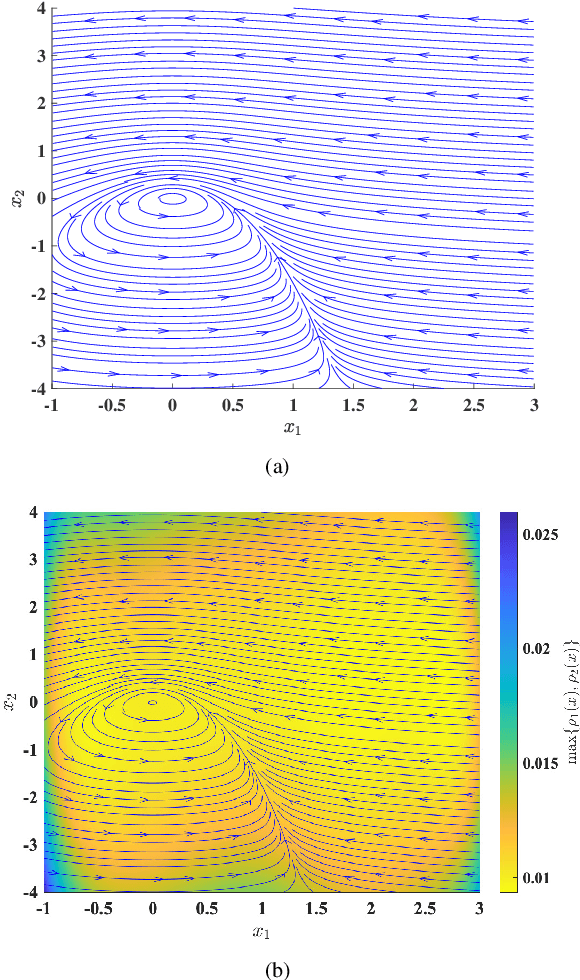
This paper focuses on the controller synthesis for unknown, nonlinear systems while ensuring safety constraints. Our approach consists of two steps, a learning step that uses Gaussian processes and a controller synthesis step that is based on control barrier functions. In the learning step, we use a data-driven approach utilizing Gaussian processes to learn the unknown control affine nonlinear dynamics together with a statistical bound on the accuracy of the learned model. In the second controller synthesis steps, we develop a systematic approach to compute control barrier functions that explicitly take into consideration the uncertainty of the learned model. The control barrier function not only results in a safe controller by construction but also provides a rigorous lower bound on the probability of satisfaction of the safety specification. Finally, we illustrate the effectiveness of the proposed results by synthesizing a safety controller for a jet engine example.
Data-Driven Verification under Signal Temporal Logic Constraints
May 08, 2020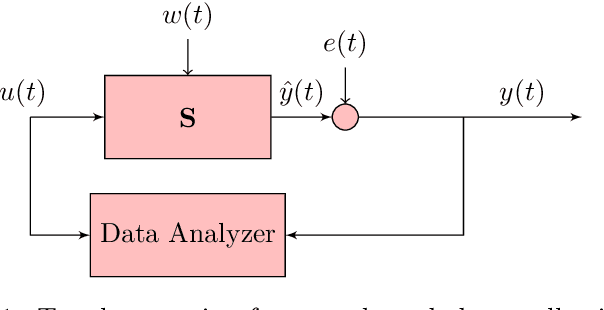
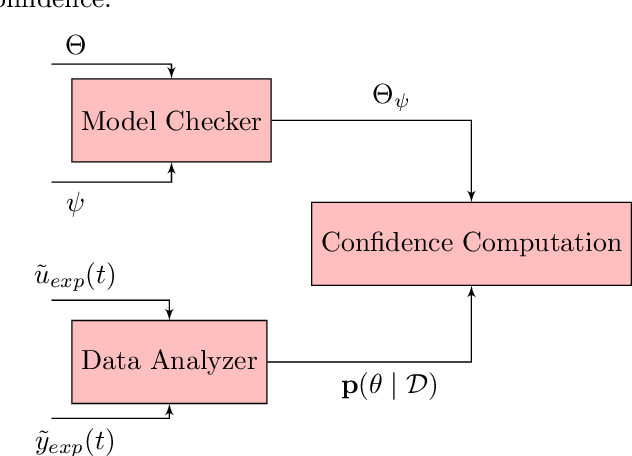
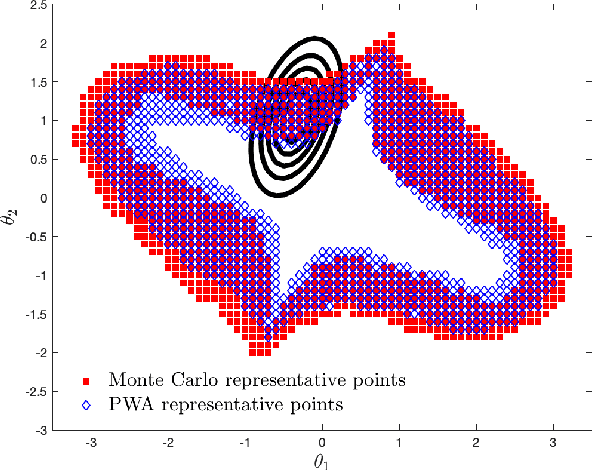
We consider systems under uncertainty whose dynamics are partially unknown. Our aim is to study satisfaction of temporal logic properties by trajectories of such systems. We express these properties as signal temporal logic formulas and check if the probability of satisfying the property is at least a given threshold. Since the dynamics are parameterized and partially unknown, we collect data from the system and employ Bayesian inference techniques to associate a confidence value to the satisfaction of the property. The main novelty of our approach is to combine both data-driven and model-based techniques in order to have a two-layer probabilistic reasoning over the behavior of the system: one layer is related to the stochastic noise inside the system and the next layer is related to the noisy data collected from the system. We provide approximate algorithms for computing the confidence for linear dynamical systems.
Formal Controller Synthesis for Continuous-Space MDPs via Model-Free Reinforcement Learning
Mar 02, 2020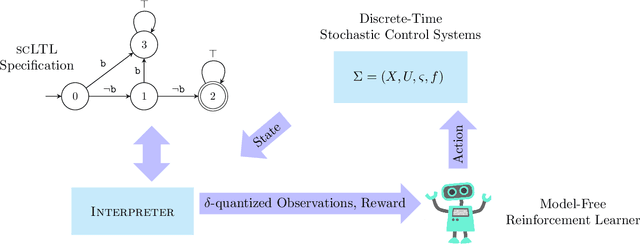
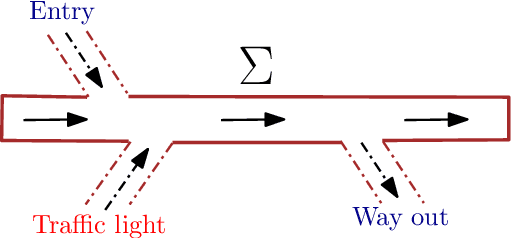
A novel reinforcement learning scheme to synthesize policies for continuous-space Markov decision processes (MDPs) is proposed. This scheme enables one to apply model-free, off-the-shelf reinforcement learning algorithms for finite MDPs to compute optimal strategies for the corresponding continuous-space MDPs without explicitly constructing the finite-state abstraction. The proposed approach is based on abstracting the system with a finite MDP (without constructing it explicitly) with unknown transition probabilities, synthesizing strategies over the abstract MDP, and then mapping the results back over the concrete continuous-space MDP with approximate optimality guarantees. The properties of interest for the system belong to a fragment of linear temporal logic, known as syntactically co-safe linear temporal logic (scLTL), and the synthesis requirement is to maximize the probability of satisfaction within a given bounded time horizon. A key contribution of the paper is to leverage the classical convergence results for reinforcement learning on finite MDPs and provide control strategies maximizing the probability of satisfaction over unknown, continuous-space MDPs while providing probabilistic closeness guarantees. Automata-based reward functions are often sparse; we present a novel potential-based reward shaping technique to produce dense rewards to speed up learning. The effectiveness of the proposed approach is demonstrated by applying it to three physical benchmarks concerning the regulation of a room's temperature, control of a road traffic cell, and of a 7-dimensional nonlinear model of a BMW 320i car.