 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgek-Inductive Neural Barrier Certificates for Unknown Nonlinear Dynamics
May 19, 2026While conventional (k=1) discrete-time barrier certificate conditions impose strict safety constraints by requiring the function to be non-increasing at every step, k-inductive barrier certificates relax this by allowing a temporary increase -- up to k-1 times, each within a threshold $ε$ -- while maintaining overall safety, and improving flexibility. This paper leverages neural networks and constructs k-inductive neural barrier certificates (k-NBCs) for (partially) unknown nonlinear systems. While neural networks offer scalability in the design process, they lack formal guarantees, requiring additional approaches such as counterexample-guided inductive synthesis (CEGIS) with satisfiability modulo theories (SMT) for verification. However, the CEGIS-SMT framework requires knowledge of system dynamics, which is unavailable in practical settings. To address this, we leverage the generalization of the Willems et al.'s fundamental lemma, using a single state trajectory, to construct a data-driven representation of (partially) unknown models for SMT verification without sacrificing accuracy. Additionally, CEGIS-SMT further removes the constraint of restricting barrier certificates to specific function classes, such as sum-of-squares, enabling greater flexibility in their design. We validate our approach on three nonlinear case studies with (partially) unknown dynamics.
Formal Controller Synthesis for Continuous-Space MDPs via Model-Free Reinforcement Learning
Mar 02, 2020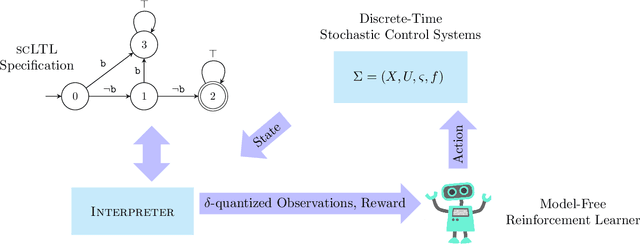
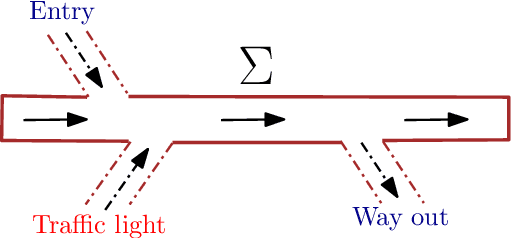
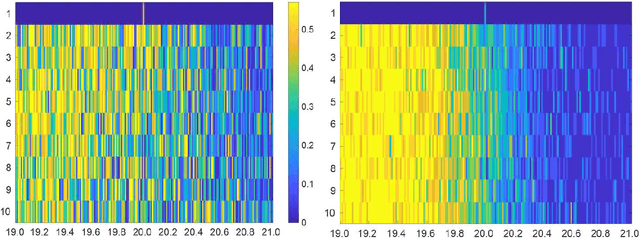
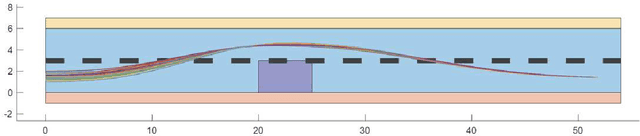
A novel reinforcement learning scheme to synthesize policies for continuous-space Markov decision processes (MDPs) is proposed. This scheme enables one to apply model-free, off-the-shelf reinforcement learning algorithms for finite MDPs to compute optimal strategies for the corresponding continuous-space MDPs without explicitly constructing the finite-state abstraction. The proposed approach is based on abstracting the system with a finite MDP (without constructing it explicitly) with unknown transition probabilities, synthesizing strategies over the abstract MDP, and then mapping the results back over the concrete continuous-space MDP with approximate optimality guarantees. The properties of interest for the system belong to a fragment of linear temporal logic, known as syntactically co-safe linear temporal logic (scLTL), and the synthesis requirement is to maximize the probability of satisfaction within a given bounded time horizon. A key contribution of the paper is to leverage the classical convergence results for reinforcement learning on finite MDPs and provide control strategies maximizing the probability of satisfaction over unknown, continuous-space MDPs while providing probabilistic closeness guarantees. Automata-based reward functions are often sparse; we present a novel potential-based reward shaping technique to produce dense rewards to speed up learning. The effectiveness of the proposed approach is demonstrated by applying it to three physical benchmarks concerning the regulation of a room's temperature, control of a road traffic cell, and of a 7-dimensional nonlinear model of a BMW 320i car.