 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Workspace Analysis and Transmission-Aware Dynamics of a Serial Spherical Tool for Microsurgery
May 23, 2026We present a kinematic and transmission-aware design framework for a serial spherical mechanism with an additional translational degree of freedom for microsurgery. The first contribution is an analytical workspace formulation that provides geometric insight into reachable motion and enables rapid selection of rotation axis orientations without numerical optimization. The second contribution is a dynamics-informed methodology for mechanisms driven by self-locking transmissions, supporting evaluation of torque requirements for a prescribed workspace geometry. The framework is accompanied by an open-source software package for friction identification and inverse dynamics analysis. Experiments on a purpose-built robotic tool for vitreoretinal surgery validate the predictive capability of the models and demonstrate their practical utility for engineering design.
Evaluating Robotic Approach Techniques for the Insertion of a Straight Instrument into a Vitreoretinal Surgery Trocar
Jan 13, 2025

Advances in vitreoretinal robotic surgery enable precise techniques for gene therapies. This study evaluates three robotic approaches using the 7-DoF robotic arm for docking a micro-precise tool to a trocar: fully co-manipulated, hybrid co-manipulated/teleoperated, and hybrid with camera assistance. The fully co-manipulated approach was the fastest but had a 42% success rate. Hybrid methods showed higher success rates (91.6% and 100%) and completed tasks within 2 minutes. NASA Task Load Index (TLX) assessments indicated lower physical demand and effort for hybrid approaches.
2020 CATARACTS Semantic Segmentation Challenge
Oct 21, 2021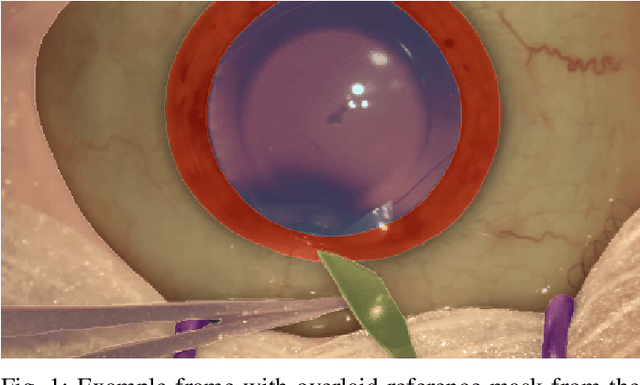
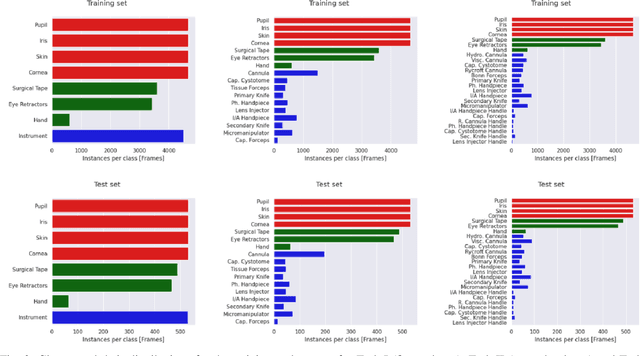
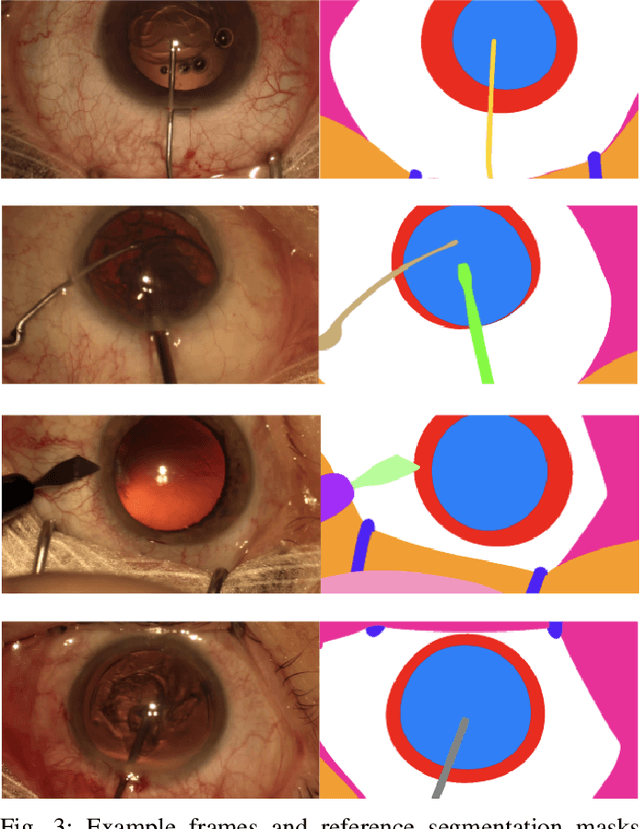
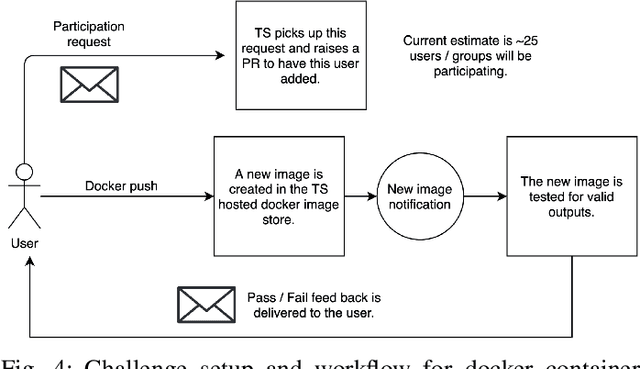
Surgical scene segmentation is essential for anatomy and instrument localization which can be further used to assess tissue-instrument interactions during a surgical procedure. In 2017, the Challenge on Automatic Tool Annotation for cataRACT Surgery (CATARACTS) released 50 cataract surgery videos accompanied by instrument usage annotations. These annotations included frame-level instrument presence information. In 2020, we released pixel-wise semantic annotations for anatomy and instruments for 4670 images sampled from 25 videos of the CATARACTS training set. The 2020 CATARACTS Semantic Segmentation Challenge, which was a sub-challenge of the 2020 MICCAI Endoscopic Vision (EndoVis) Challenge, presented three sub-tasks to assess participating solutions on anatomical structure and instrument segmentation. Their performance was assessed on a hidden test set of 531 images from 10 videos of the CATARACTS test set.