 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing and Walking Using Full Dynamics LQR Control With Contact Constraints
Jan 27, 2017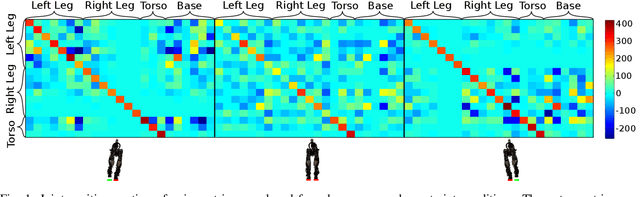
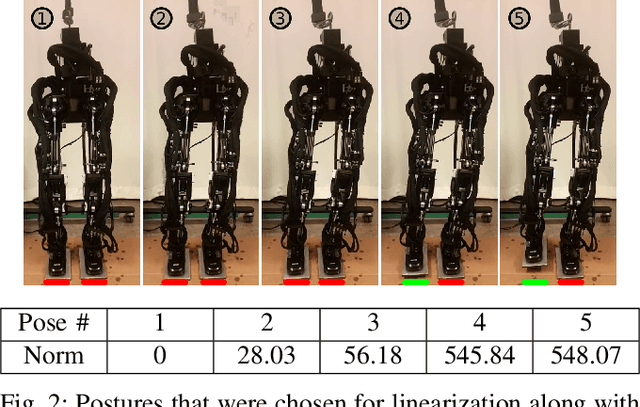
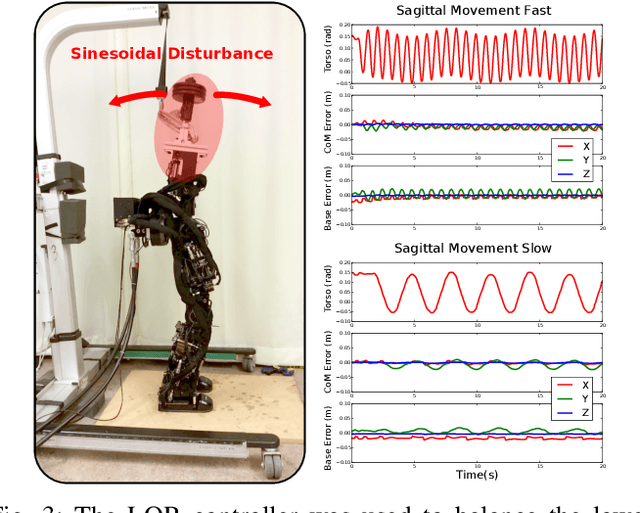
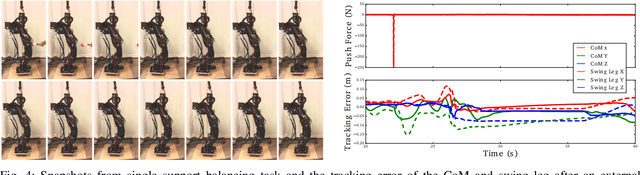
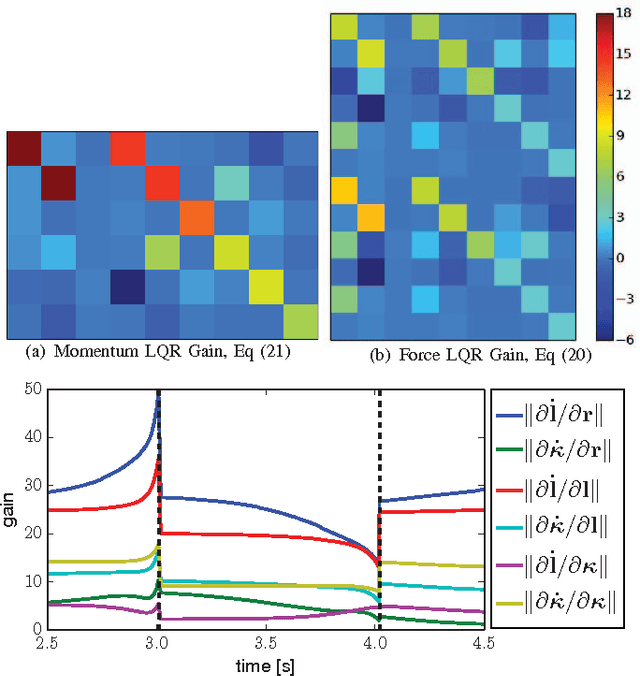
Torque control algorithms which consider robot dynamics and contact constraints are important for creating dynamic behaviors for humanoids. As computational power increases, algorithms tend to also increase in complexity. However, it is not clear how much complexity is really required to create controllers which exhibit good performance. In this paper, we study the capabilities of a simple approach based on contact consistent LQR controllers designed around key poses to control various tasks on a humanoid robot. We present extensive experimental results on a hydraulic, torque controlled humanoid performing balancing and stepping tasks. This feedback control approach captures the necessary synergies between the DoFs of the robot to guarantee good control performance. We show that for the considered tasks, it is only necessary to re-linearize the dynamics of the robot at different contact configurations and that increasing the number of LQR controllers along desired trajectories does not improve performance. Our result suggest that very simple controllers can yield good performance competitive with current state of the art, but more complex, optimization-based whole-body controllers. A video of the experiments can be found at https://youtu.be/5T08CNKV1hw.
Structured contact force optimization for kino-dynamic motion generation
Dec 24, 2016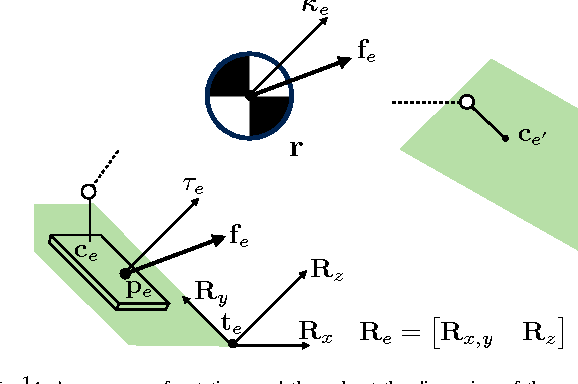
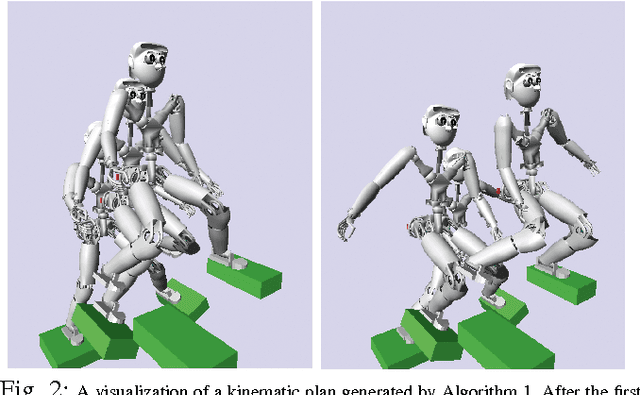
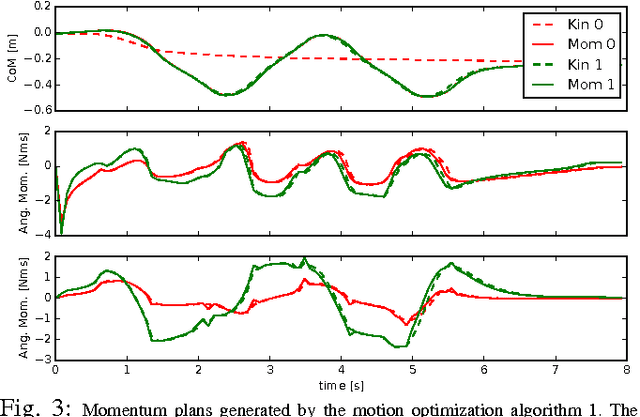
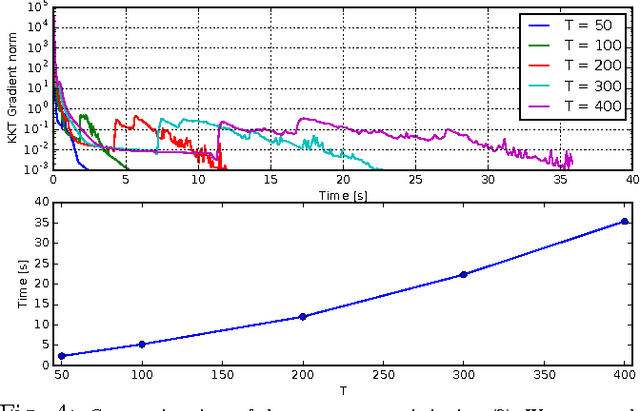
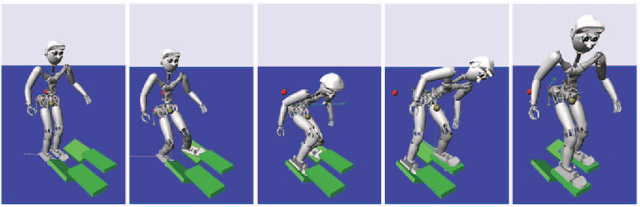
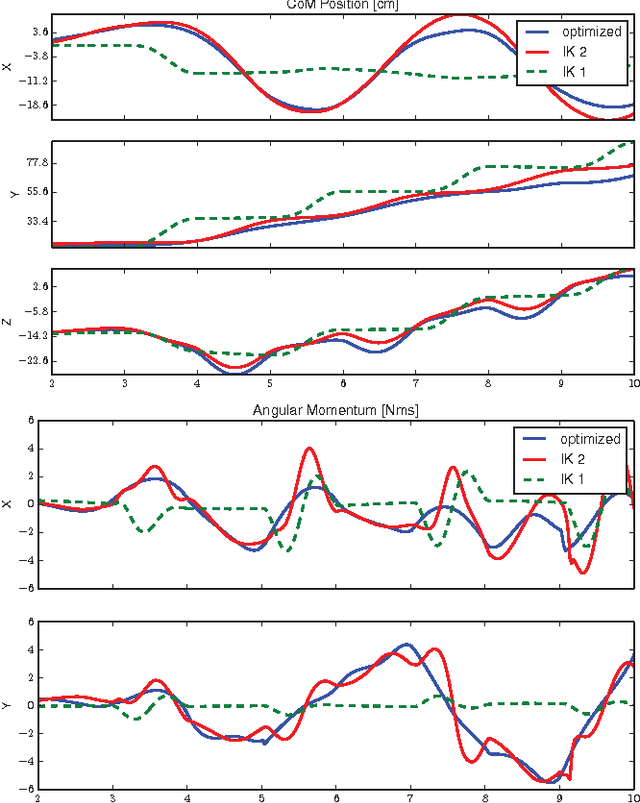
Optimal control approaches in combination with trajectory optimization have recently proven to be a promising control strategy for legged robots. Computationally efficient and robust algorithms were derived using simplified models of the contact interaction between robot and environment such as the linear inverted pendulum model (LIPM). However, as humanoid robots enter more complex environments, less restrictive models become increasingly important. As we leave the regime of linear models, we need to build dedicated solvers that can compute interaction forces together with consistent kinematic plans for the whole-body. In this paper, we address the problem of planning robot motion and interaction forces for legged robots given predefined contact surfaces. The motion generation process is decomposed into two alternating parts computing force and motion plans in coherence. We focus on the properties of the momentum computation leading to sparse optimal control formulations to be exploited by a dedicated solver. In our experiments, we demonstrate that our motion generation algorithm computes consistent contact forces and joint trajectories for our humanoid robot. We also demonstrate the favorable time complexity due to our formulation and composition of the momentum equations.
Step Timing Adjustment: A Step toward Generating Robust Gaits
Dec 12, 2016
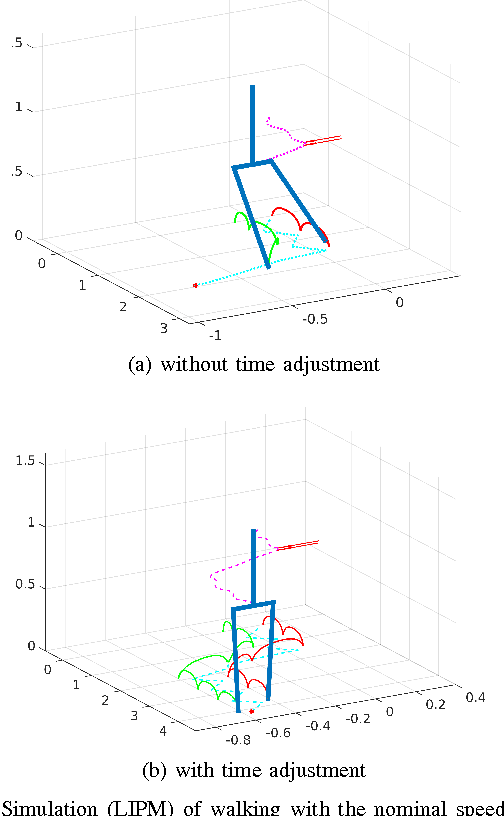
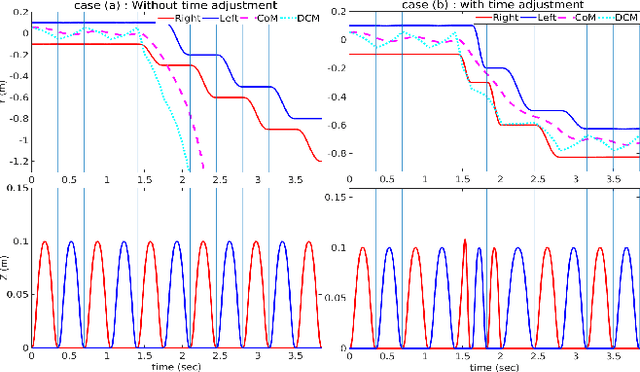
Step adjustment for humanoid robots has been shown to improve robustness in gaits. However, step duration adaptation is often neglected in control strategies. In this paper, we propose an approach that combines both step location and timing adjustment for generating robust gaits. In this approach, step location and step timing are decided, based on feedback from the current state of the robot. The proposed approach is comprised of two stages. In the first stage, the nominal step location and step duration for the next step or a previewed number of steps are specified. In this stage which is done at the start of each step, the main goal is to specify the best step length and step duration for a desired walking speed. The second stage deals with finding the best landing point and landing time of the swing foot at each control cycle. In this stage, stability of the gaits is preserved by specifying a desired offset between the swing foot landing point and the Divergent Component of Motion (DCM) at the end of current step. After specifying the landing point of the swing foot at a desired time, the swing foot trajectory is regenerated at each control cycle to realize desired landing properties. Simulation on different scenarios shows the robustness of the generated gaits from our proposed approach compared to the case where no timing adjustment is employed.
Stepping Stabilization Using a Combination of DCM Tracking and Step Adjustment
Sep 30, 2016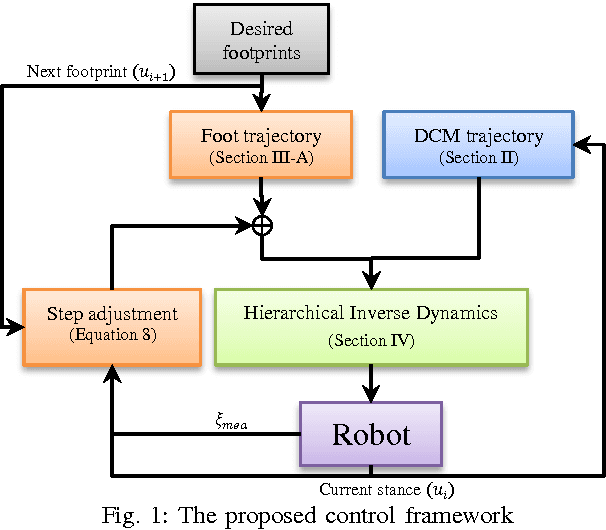
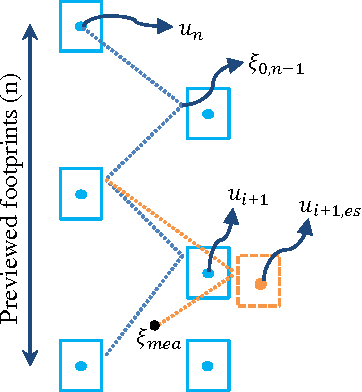
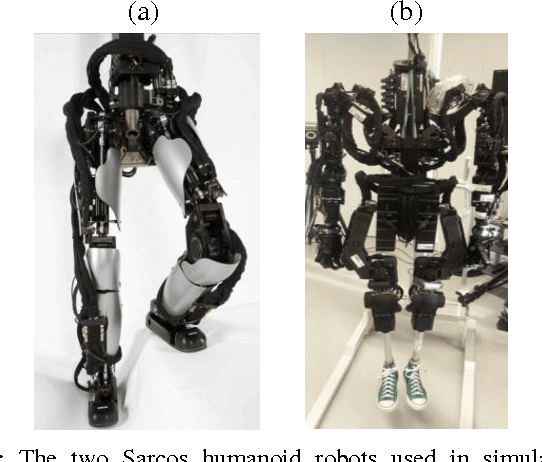
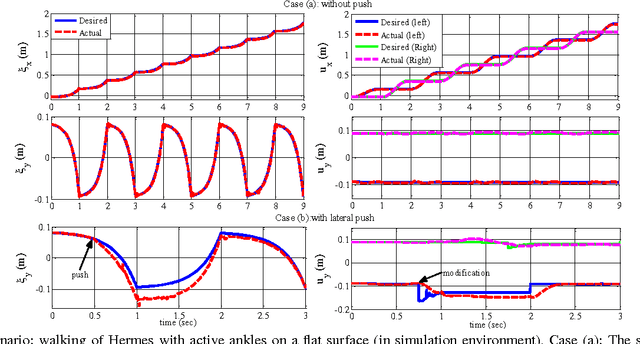
In this paper, a method for stabilizing biped robots stepping by a combination of Divergent Component of Motion (DCM) tracking and step adjustment is proposed. In this method, the DCM trajectory is generated, consistent with the predefined footprints. Furthermore, a swing foot trajectory modification strategy is proposed to adapt the landing point, using DCM measurement. In order to apply the generated trajectories to the full robot, a Hierarchical Inverse Dynamics (HID) is employed. The HID enables us to use different combinations of the DCM tracking and step adjustment for stabilizing different biped robots. Simulation experiments on two scenarios for two different simulated robots, one with active ankles and the other with passive ankles, are carried out. Simulation results demonstrate the effectiveness of the proposed method for robots with both active and passive ankles.
A Convex Model of Momentum Dynamics for Multi-Contact Motion Generation
Jul 28, 2016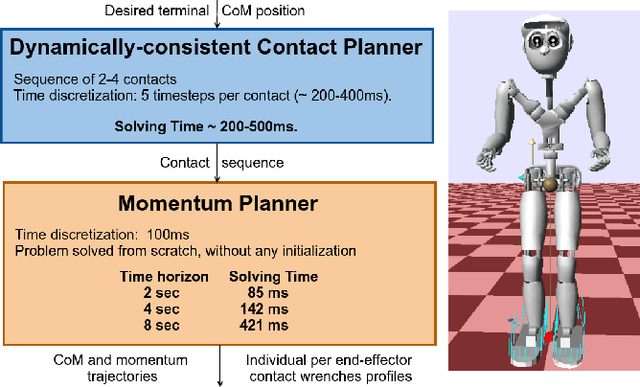
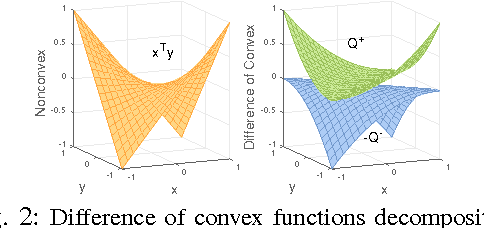
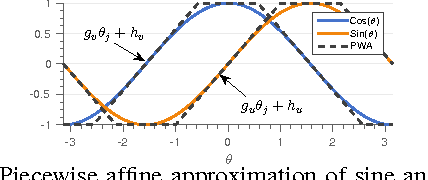
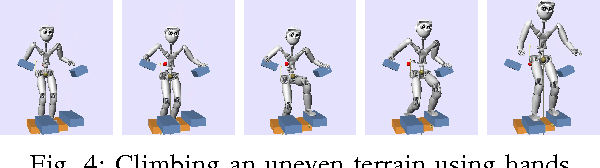
Linear models for control and motion generation of humanoid robots have received significant attention in the past years, not only due to their well known theoretical guarantees, but also because of practical computational advantages. However, to tackle more challenging tasks and scenarios such as locomotion on uneven terrain, a more expressive model is required. In this paper, we are interested in contact interaction-centered motion optimization based on the momentum dynamics model. This model is non-linear and non-convex; however, we find a relaxation of the problem that allows us to formulate it as a single convex quadratically-constrained quadratic program (QCQP) that can be very efficiently optimized. Furthermore, experimental results suggest that this relaxation is tight and therefore useful for multi-contact planning. This convex model is then coupled to the optimization of end-effector contacts location using a mixed integer program, which can be solved in realtime. This becomes relevant e.g. to recover from external pushes, where a predefined stepping plan is likely to fail and an online adaptation of the contact location is needed. The performance of our algorithm is demonstrated in several multi-contact scenarios for humanoid robot.
Inertial Sensor-Based Humanoid Joint State Estimation
Feb 16, 2016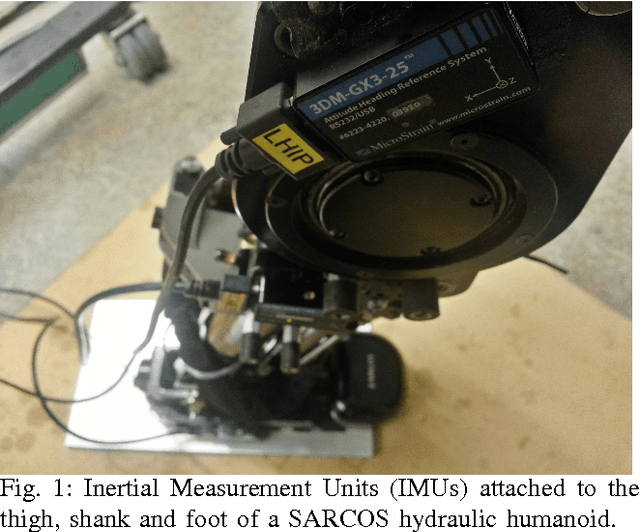
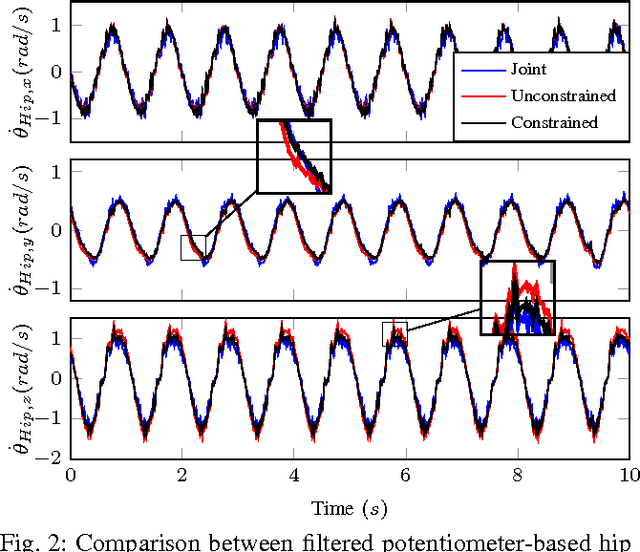
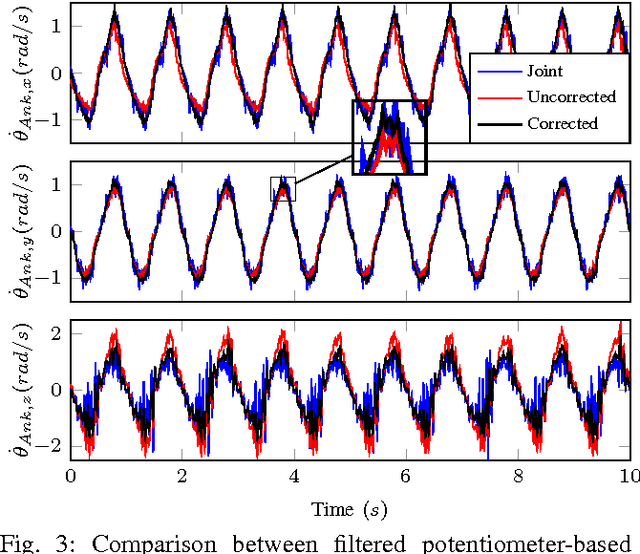
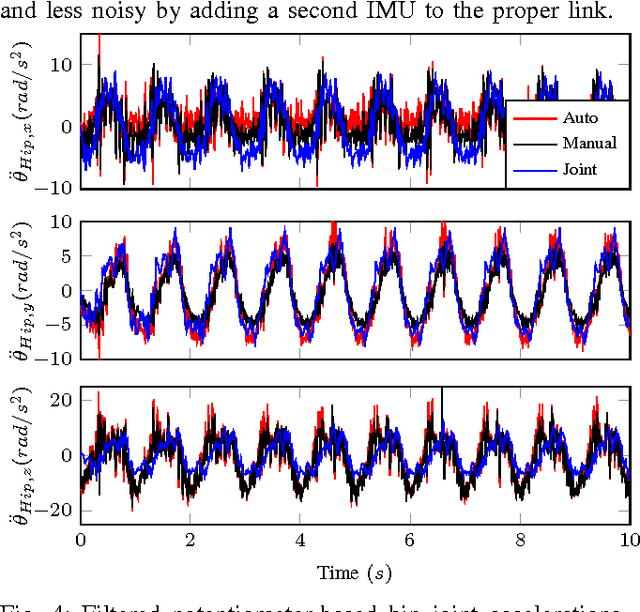
This work presents methods for the determination of a humanoid robot's joint velocities and accelerations directly from link-mounted Inertial Measurement Units (IMUs) each containing a three-axis gyroscope and a three-axis accelerometer. No information about the global pose of the floating base or its links is required and precise knowledge of the link IMU poses is not necessary due to presented calibration routines. Additionally, a filter is introduced to fuse gyroscope angular velocities with joint position measurements and compensate the computed joint velocities for time-varying gyroscope biases. The resulting joint velocities are subject to less noise and delay than filtered velocities computed from numerical differentiation of joint potentiometer signals, leading to superior performance in joint feedback control as demonstrated in experiments performed on a SARCOS hydraulic humanoid.
Momentum Control with Hierarchical Inverse Dynamics on a Torque-Controlled Humanoid
Aug 07, 2015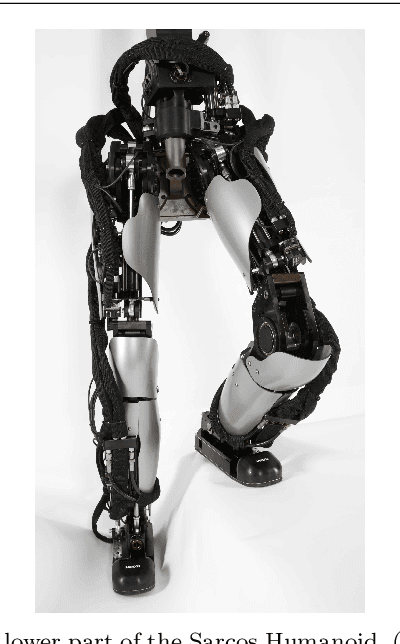
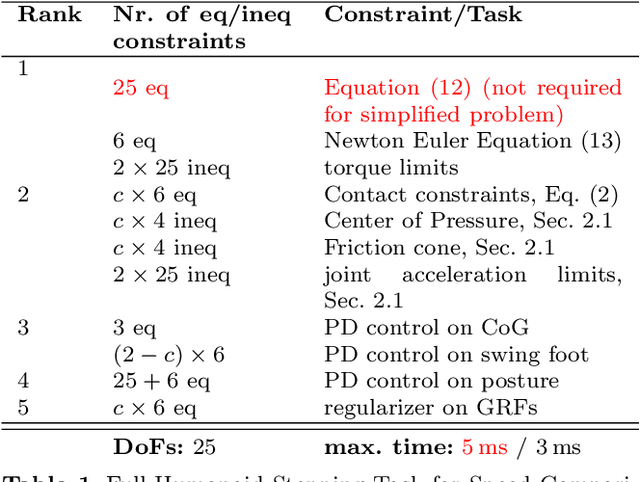
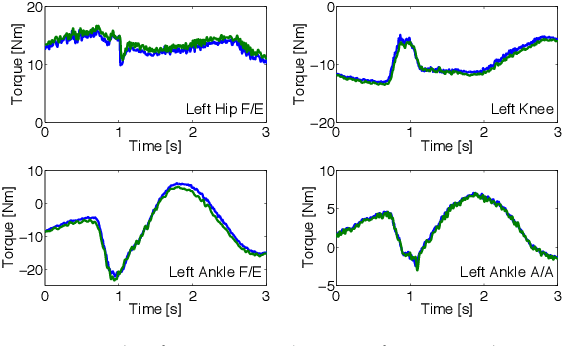
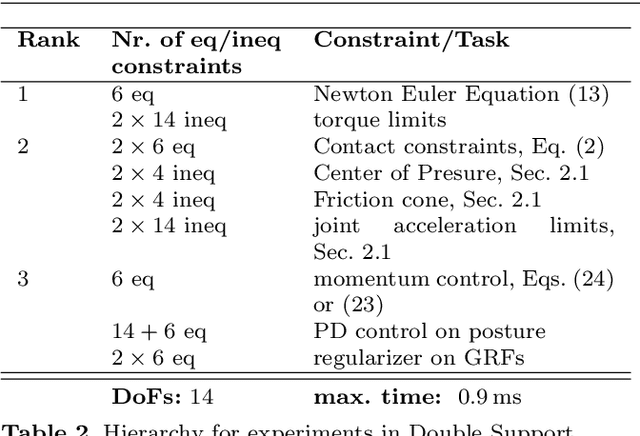
Hierarchical inverse dynamics based on cascades of quadratic programs have been proposed for the control of legged robots. They have important benefits but to the best of our knowledge have never been implemented on a torque controlled humanoid where model inaccuracies, sensor noise and real-time computation requirements can be problematic. Using a reformulation of existing algorithms, we propose a simplification of the problem that allows to achieve real-time control. Momentum-based control is integrated in the task hierarchy and a LQR design approach is used to compute the desired associated closed-loop behavior and improve performance. Extensive experiments on various balancing and tracking tasks show very robust performance in the face of unknown disturbances, even when the humanoid is standing on one foot. Our results demonstrate that hierarchical inverse dynamics together with momentum control can be efficiently used for feedback control under real robot conditions.
Humanoid Momentum Estimation Using Sensed Contact Wrenches
Jul 15, 2015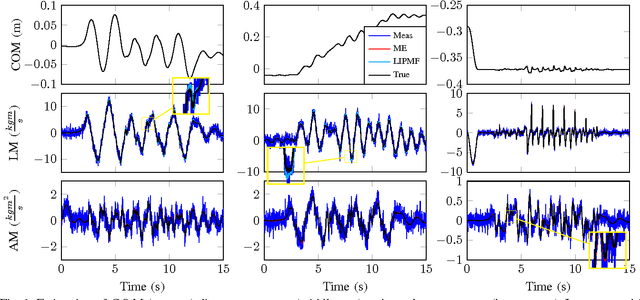
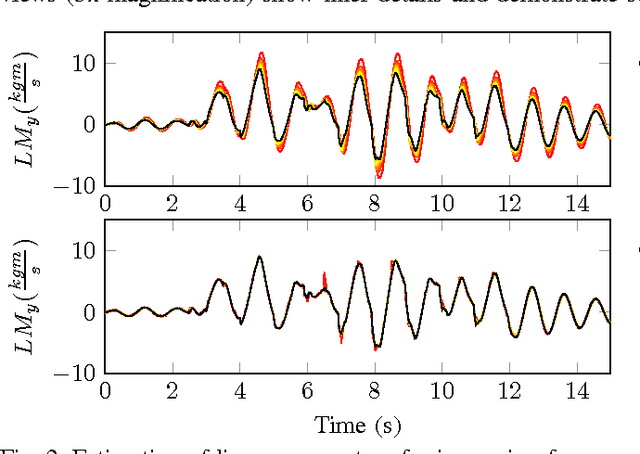
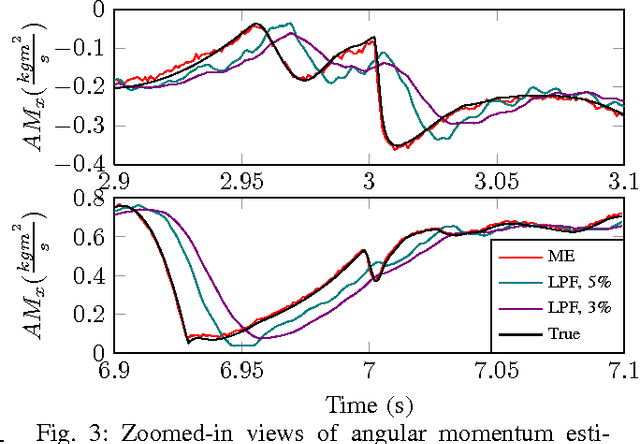
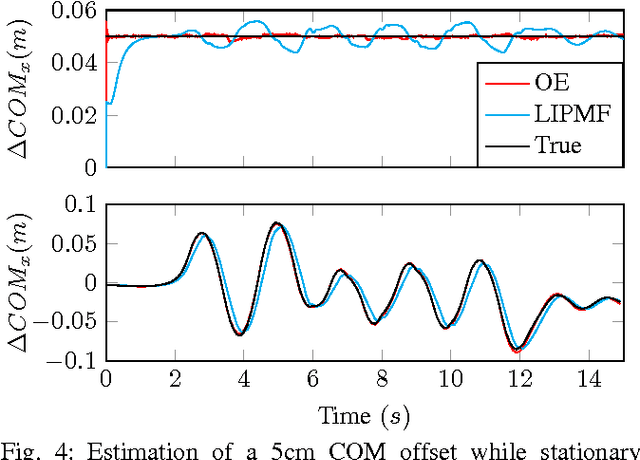
This work presents approaches for the estimation of quantities important for the control of the momentum of a humanoid robot. In contrast to previous approaches which use simplified models such as the Linear Inverted Pendulum Model, we present estimators based on the momentum dynamics of the robot. By using this simple yet dynamically-consistent model, we avoid the issues of using simplified models for estimation. We develop an estimator for the center of mass and full momentum which can be reformulated to estimate center of mass offsets as well as external wrenches applied to the robot. The observability of these estimators is investigated and their performance is evaluated in comparison to previous approaches.
Trajectory generation for multi-contact momentum-control
Jul 15, 2015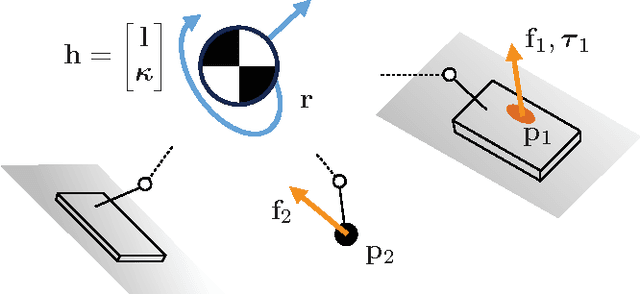
Simplified models of the dynamics such as the linear inverted pendulum model (LIPM) have proven to perform well for biped walking on flat ground. However, for more complex tasks the assumptions of these models can become limiting. For example, the LIPM does not allow for the control of contact forces independently, is limited to co-planar contacts and assumes that the angular momentum is zero. In this paper, we propose to use the full momentum equations of a humanoid robot in a trajectory optimization framework to plan its center of mass, linear and angular momentum trajectories. The model also allows for planning desired contact forces for each end-effector in arbitrary contact locations. We extend our previous results on LQR design for momentum control by computing the (linearized) optimal momentum feedback law in a receding horizon fashion. The resulting desired momentum and the associated feedback law are then used in a hierarchical whole body control approach. Simulation experiments show that the approach is computationally fast and is able to generate plans for locomotion on complex terrains while demonstrating good tracking performance for the full humanoid control.
Probabilistic Depth Image Registration incorporating Nonvisual Information
May 01, 2015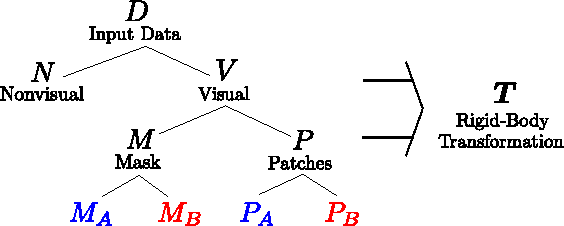
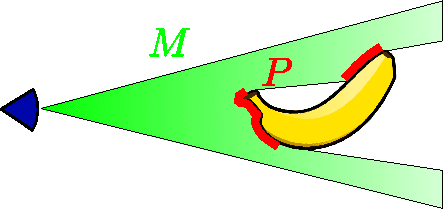
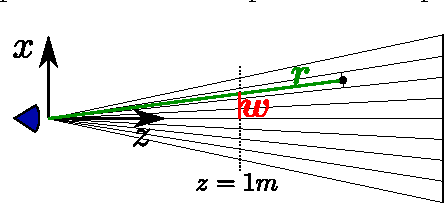
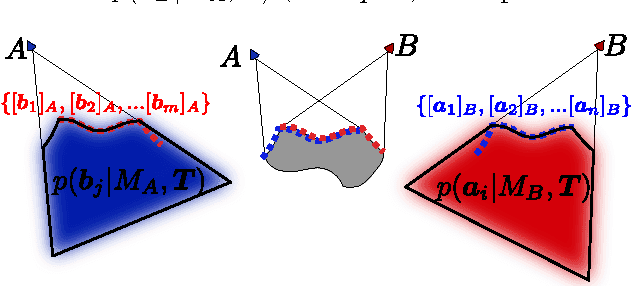
In this paper, we derive a probabilistic registration algorithm for object modeling and tracking. In many robotics applications, such as manipulation tasks, nonvisual information about the movement of the object is available, which we will combine with the visual information. Furthermore we do not only consider observations of the object, but we also take space into account which has been observed to not be part of the object. Furthermore we are computing a posterior distribution over the relative alignment and not a point estimate as typically done in for example Iterative Closest Point (ICP). To our knowledge no existing algorithm meets these three conditions and we thus derive a novel registration algorithm in a Bayesian framework. Experimental results suggest that the proposed methods perform favorably in comparison to PCL implementations of feature mapping and ICP, especially if nonvisual information is available.