 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAMS-IO-Bench and AMS-IO-Agent: Benchmarking and Structured Reasoning for Analog and Mixed-Signal Integrated Circuit Input/Output Design
Dec 25, 2025In this paper, we propose AMS-IO-Agent, a domain-specialized LLM-based agent for structure-aware input/output (I/O) subsystem generation in analog and mixed-signal (AMS) integrated circuits (ICs). The central contribution of this work is a framework that connects natural language design intent with industrial-level AMS IC design deliverables. AMS-IO-Agent integrates two key capabilities: (1) a structured domain knowledge base that captures reusable constraints and design conventions; (2) design intent structuring, which converts ambiguous user intent into verifiable logic steps using JSON and Python as intermediate formats. We further introduce AMS-IO-Bench, a benchmark for wirebond-packaged AMS I/O ring automation. On this benchmark, AMS-IO-Agent achieves over 70\% DRC+LVS pass rate and reduces design turnaround time from hours to minutes, outperforming the baseline LLM. Furthermore, an agent-generated I/O ring was fabricated and validated in a 28 nm CMOS tape-out, demonstrating the practical effectiveness of the approach in real AMS IC design flows. To our knowledge, this is the first reported human-agent collaborative AMS IC design in which an LLM-based agent completes a nontrivial subtask with outputs directly used in silicon.
LLM-jp: A Cross-organizational Project for the Research and Development of Fully Open Japanese LLMs
Jul 04, 2024



This paper introduces LLM-jp, a cross-organizational project for the research and development of Japanese large language models (LLMs). LLM-jp aims to develop open-source and strong Japanese LLMs, and as of this writing, more than 1,500 participants from academia and industry are working together for this purpose. This paper presents the background of the establishment of LLM-jp, summaries of its activities, and technical reports on the LLMs developed by LLM-jp. For the latest activities, visit https://llm-jp.nii.ac.jp/en/.
LMBAO: A Landmark Map for Bundle Adjustment Odometry in LiDAR SLAM
Sep 19, 2022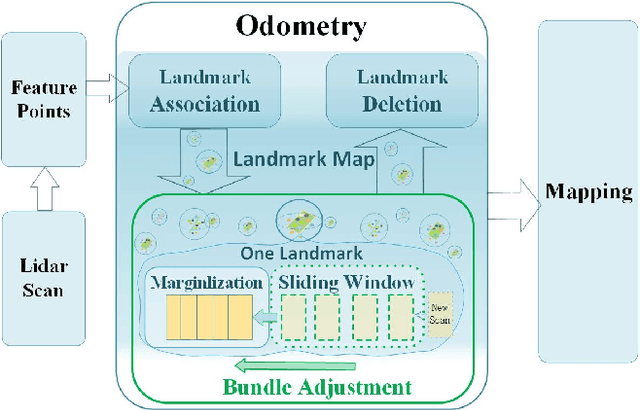
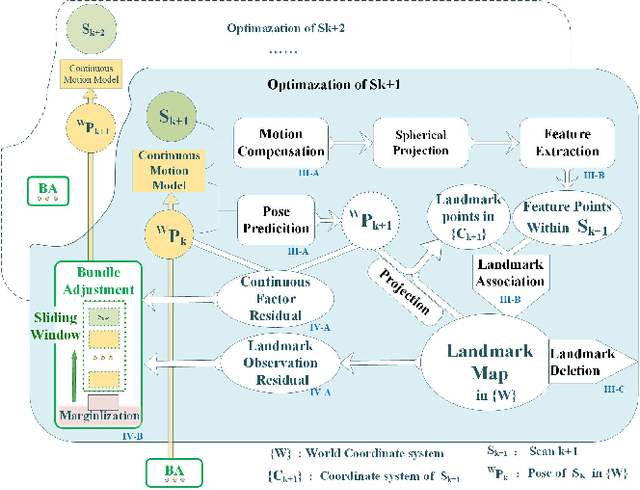
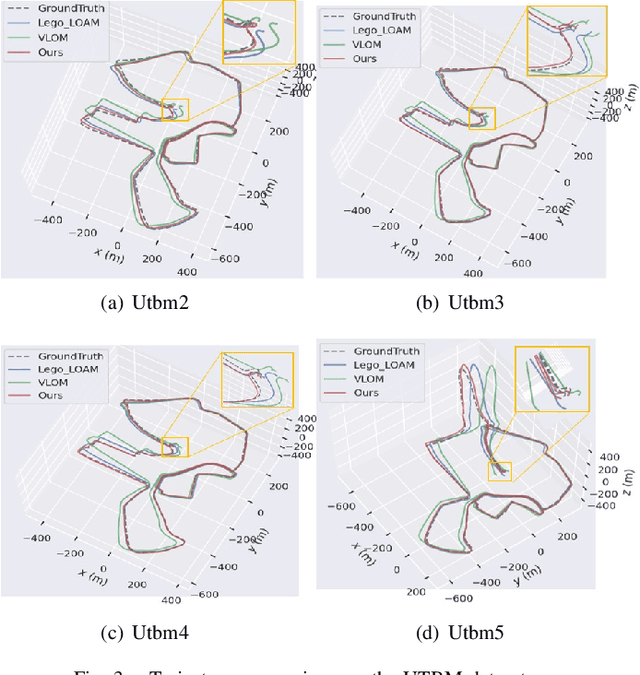

LiDAR odometry is one of the essential parts of LiDAR simultaneous localization and mapping (SLAM). However, existing LiDAR odometry tends to match a new scan simply iteratively with previous fixed-pose scans, gradually accumulating errors. Furthermore, as an effective joint optimization mechanism, bundle adjustment (BA) cannot be directly introduced into real-time odometry due to the intensive computation of large-scale global landmarks. Therefore, this letter designs a new strategy named a landmark map for bundle adjustment odometry (LMBAO) in LiDAR SLAM to solve these problems. First, BA-based odometry is further developed with an active landmark maintenance strategy for a more accurate local registration and avoiding cumulative errors. Specifically, this paper keeps entire stable landmarks on the map instead of just their feature points in the sliding window and deletes the landmarks according to their active grade. Next, the sliding window length is reduced, and marginalization is performed to retain the scans outside the window but corresponding to active landmarks on the map, greatly simplifying the computation and improving the real-time properties. In addition, experiments on three challenging datasets show that our algorithm achieves real-time performance in outdoor driving and outperforms state-of-the-art LiDAR SLAM algorithms, including Lego-LOAM and VLOM.